CUDA reduce 并行规约求和
规约求和原理如下, 把半的数据加到前一半上, 经过N次迭代, 最后归为一个数
那么为什么可以用CUDA 加速呢?
-
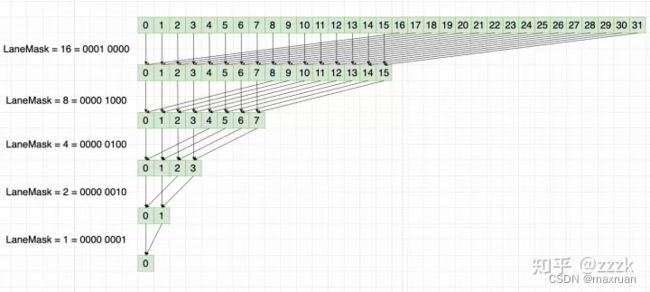
一个block中的线程可以同步处理, 比如一个block中的32个数:
第一次迭代:
data[0] += data[16]
data[1] += data[17]
…
data[15] += data31]
可以同步进行;
第二次迭代:
data[0] += data[8]
data[1] += data[9]
…
data[7] += data[15];
可以同步进行;
第N次迭代:
data[0] += data[1] -
将数据分到不同的block中, 先对每一个block单独并行处理, 最后再处理每一个block 的结果, 例如, 1024 * 1024 大小的数据, 每一个block处理1024个数据, 一共1024 个block, 处理完后剩下1024个数据, 接着在处理, 就有加速的效果:
每一个block 块作为 global 核函数的处理单元, 在一个block中能保证一个block 中的数据同步.
代码如下:
__global__ void global_reduce_kernel(float *d_in, float *d_out, int maxsize){
int my_id = threadIdx.x + blockDim.x * blockIdx.x;
int tid = threadIdx.x;
if(my_id > maxsize)return;
for( int s = blockDim.x / 2; s > 0; s>>=1){//迭代N 次
if(tid < s){ // 为什么用tid 约束, 因为能保持block同步.
if((my_id + s) > maxsize){
continue;
}else{
d_in[my_id] += d_in[my_id + s]; // 将后半段数据加到前半段
}
}
__syncthreads(); // 保证block中数据同步
}
if(tid == 0){ // 处理每一个block 块
d_out[blockIdx.x] = d_in[my_id];
}
}
tid : 每一个block 中的线程id
my_id : 所有 block 中的线程id
程序执行时会执行 blocks * threads 次 global 核函数, 区分开的就是通过
threadIdx.x 和 blockIdx.x
2. 使用 shared 共享内存
将每一个数据拷贝到对应的block 中的 shared 共享内存中. 这样减少全局内存的访问,提升速度.
__global__ void share_reduce_kernel(float *d_in, float *d_out, int maxsize){
extern __shared__ float sdata[]; // 每一个block中共享一个sdata
int tid = threadIdx.x; // 每一个block中线程id
int mid = threadIdx.x + blockDim.x * blockIdx.x; //所有block中的访问id
sdata[tid] = d_in[mid]; //将所有block中的数据复制到每一个block中的共享内存sdata中, 这是共享内存精华
__syncthreads(); // 等待block中所有数据拷贝完
for(int i = blockDim.x / 2; i > 0; i>>=1){
if(tid < i){
if(mid + i > maxsize){
continue;
}else{
sdata[tid] += sdata[tid + i]; // 已经将每一个block的数据拷贝到sdata, 因此只需要在block中操作.
}
}
}
__syncthreads(); // 等待block中所有数据处理完
if(tid == 0){
d_out[blockIdx.x] = sdata[0]; // 每一个block 中的共享内存中的求和结果赋值给d_out
}
}
在一个核函数中声明 共享内存 extern shared float sdata[], 其实就是在一个block 块中分配一块共享内存, 如果有N 个block块, 就相当分配了N 个共享内存块, 每一个 block 中共享同一个共享内存.
sdata[tid] = d_in[mid];
将不同block 中的数据放置到不同block中的共享内存中.可同步进行,几乎不耗费时间,但要同步.
往后的处理只在block中进行,减少全局内存访问,即: sdata[tid] += sdata[tid + i];
注意:
规约求和时, 每个block的线程数量为 2 的 N 次方, 否则可能导致对不齐没有归到一个数上结果出错.
附上全代码:
#include>>(d_in, d_intermediate, size);
share_reduce_kernel<<<blocks, threads>>>(d_in, d_intermediate, size);
int remain_size = blocks;
threads = (blocks + 1) / 2 * 2;
blocks = 1;
cudaDeviceSynchronize();
float temp[20];
cudaMemcpy(temp, d_intermediate, 10 * sizeof(float), cudaMemcpyDeviceToHost);
for(int k = 0; k < 20; k++){
std::cout << " k = " << k << " " <<temp[k]<< std::endl;
}
std::cout << " blocks = " << blocks << " threads = " <<threads<< std::endl;
//global_reduce_kernel<<>>(d_intermediate, d_out, remain_size);
share_reduce_kernel<<<blocks, 8>>>(d_intermediate, d_out, remain_size);
}
int main(){
test_cuda_device();
int d_size = 18;
float *hdata = new float[d_size];
float sum = 0;
for(int i = 0; i < d_size; i++){
hdata[i] = i;
sum += hdata[i];
}
std::cout << " sum = " << sum << std::endl;
float *ddata_in, *ddata_intermediate, *ddata_out;
cudaMalloc((void**)&ddata_in, sizeof(float) * d_size);
cudaMalloc((void**)&ddata_intermediate, sizeof(float) * d_size);
cudaMalloc((void**)&ddata_out, sizeof(float) * 1);
cudaMemcpy(ddata_in, hdata, d_size * sizeof(float), cudaMemcpyHostToDevice);
reduce(ddata_out, ddata_intermediate, ddata_in, d_size);
float hdata_out;
cudaMemcpy(&hdata_out, ddata_out, 1 * sizeof(float), cudaMemcpyDeviceToHost);
std::cout << " hdata_out = " << hdata_out << std::endl;
return 0;
}