(4)(4.2.6.7) 球头阻尼器+耳塞振动装置
文章目录
1 降低振动的建议
2 应该被减震的振动的总结
3 其他减震考虑因素
4 术语
5 相关讨论的链接
1) 安装板的每个角落都有一个 100 克的软橡胶球型"万向节"阻尼器,每个里面放了半个聚氨酯泡沫耳塞。
2) 万向节球型阻尼器本身可以在拉伸或压缩状态下工作。
3) 耳塞提供了一个额外的阻尼介质,其频率阻尼范围与球头阻尼器本身不同。
4) 耳塞还能使球头支架变硬,防止正常飞行动作引起的过度自由运动。
5) 这成功地将具有柔性臂和超过 12 英寸螺旋桨的 Flamewheel 克隆减震到 0.05G 范围。
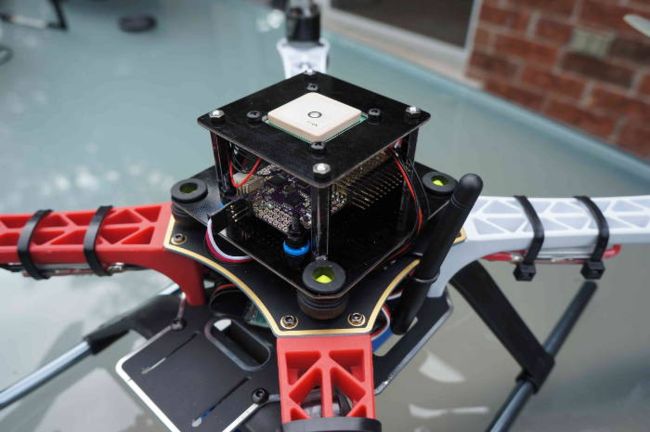
6) 自动驾驶仪也安装在防震扣环上,可从 McMaster Carr 公司购买(建议每包 25 个零件 #9311K64)。
7) 100G 球头型万向节减震器可以直接从各种供应商处订购:copter-rc.com。
1 降低振动的建议
对于旋翼来说,最大的振动源通常是穿过机臂的桨叶,但也存在其他的振动源,按照这个建议可以减少振动:
1) 机架弯曲,尤其是机架臂弯曲是造成异步振动的一个重要原因,机架臂应尽可能地坚硬。
- 原装的大疆火轮旋翼机有足够刚性的注塑臂,许多克隆机则没有;
- 铝制或碳纤维臂的扭曲和弯曲程度较低,从而减少振动;
- 像"鸢尾花"这样带有注塑外骨骼或机臂的直升飞机具有足够的刚性;
- 廉价、轻巧的框架往往比高质量、强壮的框架更容易弯曲,而且你装载的旋翼机越重,它的弯曲程度就越大(不是好事)。
2) 电机到机架臂和机架臂到中央 hub 的安装需要安全和无弯曲(有时对碳管臂是个问题)。
3) 电机需要平稳运行(轴承没有磨损或"刺耳"的声音)。
4) 连接螺旋桨和电机的螺旋桨适配器需要同心,并且非常直。
5) 螺旋桨应使用良好的手动螺旋桨平衡器进行完全平衡。
6) 电机平衡(或像 T-Motor 这样真正好的工厂平衡电机)可以产生重大影响。
7) 与框架和重量不匹配的螺旋桨,或者 CCW 和 CW 的弯曲度不一样的螺旋桨是非常有问题的。
8) 好的螺旋桨振动更小。
9) 碳纤维螺旋桨是刚性的,振动较小,可以减少振动,但非常尖锐,这是一个重大的安全隐患。
2 应该被减震的振动的总结
1) 我们主要需要减少的振动频率和振幅是电机/螺旋桨单元以飞行速度转动的特性。
2) 也就是说,它是一个相当高的频率,振幅相当低。
3) 这就要求我们提供一个短耦合的减震和隔离范围。
4) 板子本身不需要有也不需要从超过振动幅度的运动范围中受益。
5) 因为主板不对机身施加任何力,所以我们唯一需要关注的减震/隔离是主板本身的重量(质量)加上机身正常飞行操纵所施加的力。
6) 由于优秀的宽频范围、高减震材料是可用的,我们最关心的是使用适当数量的材料来最佳地减震我们的自动驾驶仪(太多和太少一样糟糕)。
7) 将自动驾驶仪和接收器合并到一个单独的减震电子模块"板"或外壳上,可以增加模块的质量,使其更容易有效减震,并减少相互连接的线路,使整个系统更加模块化。
3 其他减震考虑因素
1) 硬盘驱动器防震扣眼(Hard Disk Drive Anti-Vibration Grommets)可以提供足够的或补充的减震。
2) 通过对连接到自动驾驶仪的所有电线采用高柔性电线和应力消除方法,也可以在振动隔离方面取得重大进展(同时使用必要的最低数量的电线)。
3) 一些框架由于框架刚度/弯曲而具有低于正常的振动特性,隔离的集中质量会大大影响电机/螺旋桨振动传递到中央飞行控制器。
4) 隔离和减震可以通过将自动驾驶仪/外壳夹在两边的减震垫之间,在大约 20% 的压缩率下得到一定程度的改善。30 硬度的 Sorbothane 实际上被指定为 15% 至 20% 的压缩,以获得最佳的减震。
5) 虽然 30 硬度的 Sorbothane 似乎是一个很好的选择,但经验表明,它将被永久压缩,在减少振动方面不如凝胶解决方案有效。
6) 关于第一个达到 0.05G 减震的 APM 防震安装系统(2013年2月20日改进为 0.02G)的博客链接,这是一个双区隔离系统,结合了O型圈悬挂和硅胶垫,(Here!)。
7) 电机平衡也可以减少振动,特别是对于较便宜或较大的电机。平衡包括:
- 将一个小的扎带紧紧地缠在电机上(没有螺旋桨),修剪掉延长的标签,然后将其旋转起来;
- 多次尝试,每次都把电机外壳上的扎带转动一下,直到振动减少或消失;
- 如果需要或对于较小的电机,可以用一小块苏格兰胶带代替扎带重新定位;
- 当你找到振动最小的地方时(你应该能够听到它),用毛笔在扎带扣的正下方标记这个地方;
- 在绑带扣的地方加一小点热胶枪胶水,每次增加一点胶水,直到振动减到最小;
- 如果你放了太多的胶水,可以用 X-acto 刀去除。
8) 摄像机支架也需要有效地隔离和减震,但他们已经有一些"软"的安装解决方案。
9) 摄像机伺服舵机也需要进行振动隔离,要么隔离摄像机支架本身,要么使用自己的减震方案。
10) 你应该在相机伺服臂上使用高质量的球形关节,并在安装支架本身使用足够的轴承或衬套,以防止惯性滑移。
11) 没有自由活动的优质伺服机也是精密摄像机工作的必备条件。
12) 在这一点上,似乎框架越硬越好,因为框架的弯曲会在将电机引起的动作转化到位于中心的自动驾驶仪上时引入不理想的机械延迟(滞后)。(不要把电机臂冲击安装)。
13) 减震介质的数量和类型需要与我们试图隔离的物品的重量(质量)以及我们试图减震的振动的频率和振幅仔细匹配。我们正试图隔离一个重量不到 2 盎司的自动驾驶仪,这是一个非常小的质量。
14) 几乎所有现成的解决方案(无论是垫子还是螺柱类型)都是为一个隔离的质量而设计的,其重量至少是普通自动驾驶仪重量的 5 到 10 倍,才能达到最佳效果。这包括所有预制的 Sorbothane、Alpha 凝胶、EAR、记忆泡沫或其他硅胶或聚氨酯凝胶或泡沫支架,以及 Lord Micro 支架。
15) 为承受正常飞行压力的自动驾驶仪或电子模块的质量而适当设计的螺纹螺柱或套筒式固定装置将是一个更好的长期解决方案。
4 术语
所用的方法通常会同时包含减震和隔离:
- 隔离是简单的无震动(弹簧或橡皮筋支撑),它允许被隔离物体的运动基本上与包含的物体分开(例如汽车弹簧);
- 减震是指通过减震介质(例如汽车减震器)将振动转换为热能。
5 相关讨论的链接
- RC Groups page on Vibration Effects relating to a camera mounts
- DIYDrones discussion related to Vibration Control
- Gary McCray’s DIYDrones BLOG re Vibration Control