基于微无人机的室内测绘与图形 SLAM
尽管许多建筑物都有竣工2D平面图,但在需要时通常无法足够快地提供这些平面图。这些计划也经常过时,因为建筑物经常变化,而且使用静态测绘系统(如地面激光扫描仪(TLS))更新其信息的成本很高。我们提出了一种能够生成现实世界中各种室内环境的3D地图的无人机。与常用的无人机相比,我们通过使用简单且相对低成本的传感器来保持无人机设计尽可能便宜。反过来,这会导致在发生碰撞时易于更换的无人机。提出的无人机具有以下特性:
①在硬件方面,它是一架微型无人机,配备六个1D扫描仪和一个光流量传感器。我们选择了平台和连接的传感器,在性能、应用、尺寸和成本之间进行权衡。
②在软件方面,我们的无人机采用基于特征的图形SLAM进行定位和映射。我们的SLAM受到Karam等人的启发。它旨在通过连续LiDAR数据中检测到的线性段来映射具有平面结构的室内环境。
我们配置了一个微型无人机,带有一个用于测绘和避障的多范围甲板,以及一个用于测量水平运动的Flow甲板V2。两副牌都由Bitcraze出售。无人机的图片如图1 所示,它是一种四轴飞行器微型无人机,尺寸为182 × 158 × 56毫米,最大有效载荷能力约为 150克。微型无人机基于四轴飞行器配置,因为它的结构简单,控制稳定。

图1 带有传感器的四轴飞行器平台
该平台配备了四个塑料螺旋桨,电子速度控制器(ESC)和四个SkyRC X2208电机,直径为28毫米,长度为35毫米,重量为37.5克。无人机由两节三节锂电池供电,标称电压为11.1 V,尺寸为57 × 30 × 23毫米,重量为70克,最小容量为800mAh。电池为长达12分钟的连续飞行提供能量。包括无人机结构(52克)在内的关键部件的总重量为401.5克。由于我们的无人机配备了一维扫描仪,因此每个时间戳记录的激光数据不足以提取平面段。因此,我们利用EKF预测的点云来提取平面段(图2)。
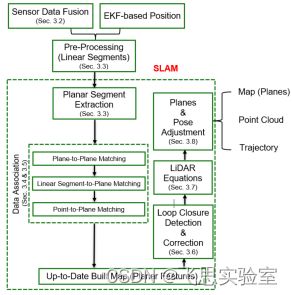
图2 算法总体框架
我们通过使用线分割算法,在预测的点云中独立地检测到每个边走廊的线性段,然后基于线性段提取平面段,假设墙是垂直的(图3)。对于垂直测距仪,使用表面生长分割提取平面段。

图3.左侧护林员在走廊左侧墙壁上捕获的激光点的俯视图。颜色显示平面关联,黑线表示提取的平面(2D 边界框)
我们从三个不同的测试站点收集了数据。在每个站点,我们选择了映射场景,使操作员无法从起飞位置看到观察到的空间。第一个、第二个和第三个数据集,命名为ITC1、ITC2和ITC3,是在荷兰恩斯赫德的特温特大学地理信息科学和地球观测学院(ITC)大楼收集的。ITC1是L形六边形形式的走廊(图 4 和图5),而ITC3是围绕不规则形状房间的环形(图 6)。ITC1和ITC2(图7)数据集分别用于评估所提出的室内测绘方法的性能,分别与RIEGL TLS(图5)和平面图获得的地面事实进行比较。
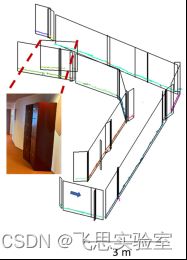
图4.ITC1 数据集的点云(颜色显示平面关联)与墙平面(黑线)的倾斜视图。蓝色箭头表示起始位置,红色虚线表示位于走廊中的橱柜。出于可视化目的,未显示天花板和楼层点

图5.ITC1数据集的TLS 3D点云的倾斜视图。出于可视化目的,未显示天花板和楼层点
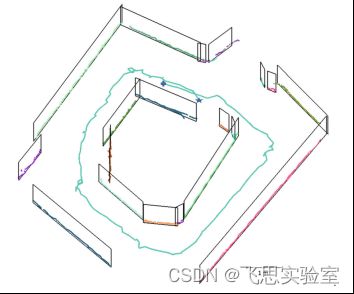
图6.ITC3 数据集的点云(颜色显示平面关联)与墙平面(黑线)的倾斜视图。蓝星和加号分别指轨迹的起点和终点(绿松石色)。出于可视化目的,未显示天花板和楼层点

图7.我们的ITC2数据集地图。(a) 我们的点云(颜色显示平面关联)与墙平面(黑线)的俯视图。出于可视化目的,不显示楼层的点。绿色椭圆形环绕着走廊上的一根柱子。红色虚线表示走廊中的相应空间。(b) 地图的倾斜视图
第四个数据集名为“公寓”,收集在德国明斯特一个典型学生公寓的走廊上。与ITC数据集类似,我们利用该数据集来评估无人机在绘制室内空间方面的性能,并将地图中的一些距离与平面图中的相应距离进行比较(图8)。
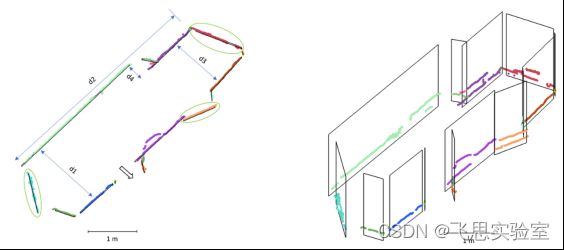
图8 公寓数据集的点云的顶视图(左)和倾斜视图(右)。颜色显示平面关联。出于可视化目的,不显示天花板和地板的点。黑色 2D 边界框表示重建的平面。绿色椭圆形环绕着打开的门,蓝色箭头表示距离测量值,黑色箭头指向另一个空间的开口
第五和第六个数据集分别命名为DLR1和DLR2,在德国柏林的德国航空航天中心(DLR)室内捕获。DLR1数据集是从走廊和打印机室获得的,它们通过一扇敞开的门连接(图9)。DLR2数据集是在几乎U形的空间中捕获的(图10)。这些数据集用于将拟议的室内测绘方法的性能与IPS头盔和MAX无人机的性能进行比较。

图9.DLR1数据集的点云(颜色显示平面关联)与墙平面(黑线)的俯视图。天花板点(蓝色)和地板点(绿色)在扫描空间的中间重叠。红色圆圈表示物体(打印机),红色箭头指向橱柜,参见图11

图10.DLR2数据集的点云(颜色显示平面关联)与墙平面(黑线)的顶视图。天花板(黄色和粉红色)和地板点(绿色)两个不同高度的点在扫描空间的中间重叠。红色圆圈表示我们的无人机未访问的区域,红色箭头指向厨房空间。红色虚线表示厨房中的相应物体
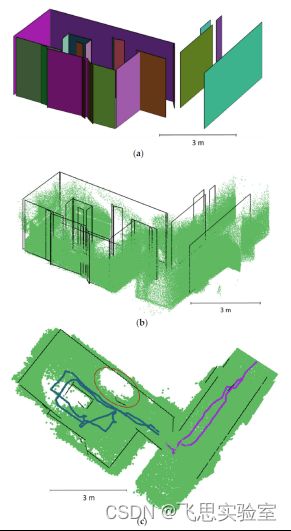
图 11.MAX和我们的DLR1数据集地图。(a)地图的倾斜视图(彩色边界框是指3D平面要素)。(b)MAX 3D点云(绿色)和我们的地图的倾斜视图(黑色边界框是指 3D 平面特征)。(c)MAX 3D点云(绿色)和我们的地图(黑色边界框指3D平面特征)的顶视图,其中点位于天花板的两个不同高度(蓝色和紫色)。红色圆圈表示对象(打印机)
同样,DLR数据集的点云(图 9和图 10)在几何上与MAX无人机(图11)和IPS头盔(图 12)得出的相应点云相似。此外,图12表明,我们的点云比IPS点云更精确地描绘了DLR站点的几何形状。
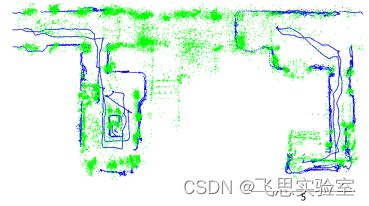
图12 DLR数据集的IPS 3D 点云(绿色)和点云(蓝色)的俯视图
我们的无人机能够绘制本研究中使用的所有测试地点,并提供点云形状的地图,这为探索目的提供了足够的信息。实验结果表明,我们的无人机在绘制小型室内空间方面具有良好的性能。从我们的点云与与之进行比较的系统(MAX无人机,IPS头盔和TLS)的点云之间的偏差相对较低中可以明显看出这一点。此外,与平面图的比较表明,距离差异不超过15厘米。
源自:Karam, S.; Nex, F.; Chidura, B.T.; Kerle, N. Microdrone-Based
Indoor Mapping with Graph SLAM. Drones 2022, 6, 352. https://doi.org/
10.3390/drones6110352