图的两种遍历方式--深度优先与广度优先
1.深度优先遍历
深度优先遍历(Depth First Search),也称为深度优先搜索,简称为DFS。
DFS算法思路:
(1)在访问图中某一起始顶点V后,由V出发,访问它的任一邻接点W1;
(2)再从W1出发,访问与W1邻接但还未被访问过的顶点W2;
(3)然后再从W2出发,进行类似的访问,…
(4)如此进行下去,直至到达所有的邻接顶点都被访问过的顶点U为止;
(5)接着,退回一步,退到前一次刚访问过的顶点,看是否还有其它没有被访问过的邻接顶点;
(6)如果有,则访问此顶点,之后再从此顶点出发,进行与前述类似的访问;
(7)如果没有,就再退回一步进行搜索,重复上述过程,直到连通图中所有的顶点都被访问过为止。
上述算法思路表明,DFS就是一个递归的过程,类似于一棵树的前序遍历。
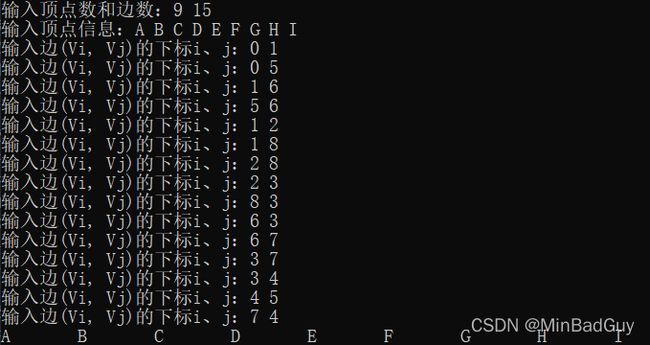
1.1邻接矩阵的DFS
#include 运行结果:
以《大话数据结构》图7-5-2的无向图为例。
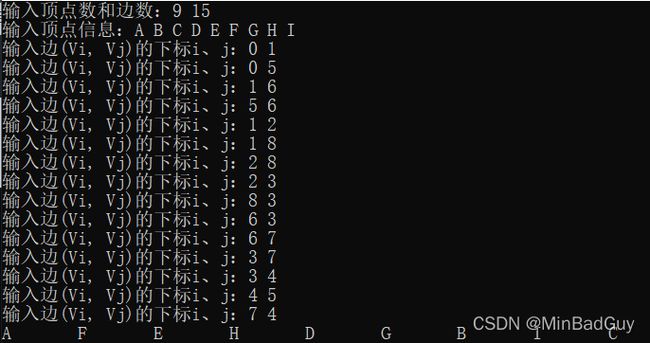
1.2邻接表的DFS
#include 运行结果:
以《大话数据结构》图7-5-2的无向图为例。
2.广度优先遍历
广度优先遍历(Breadth First Search),也称为广度优先搜索,简称为BFS。
BFS算法思路:
从图的某一结点出发,首先依次访问该结点的所有邻接点Vi1, Vi2, …, Vin;
再按这些顶点被访问的先后次序依次访问与它们相邻接的所有未被访问的顶点;
重复此过程,直至所有顶点均被访问为止。
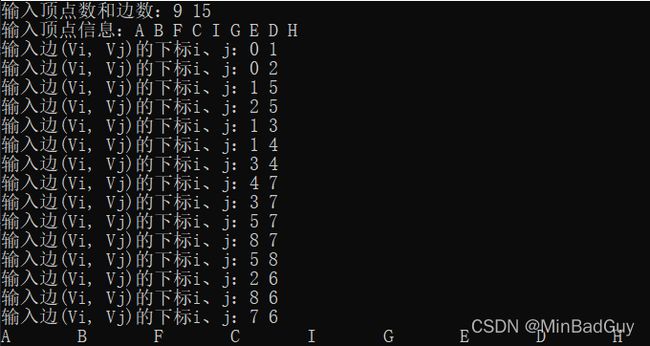
2.1 邻接矩阵的BFS
#include 运行结果:
以《大话数据结构》图7-5-3的无向图为例。
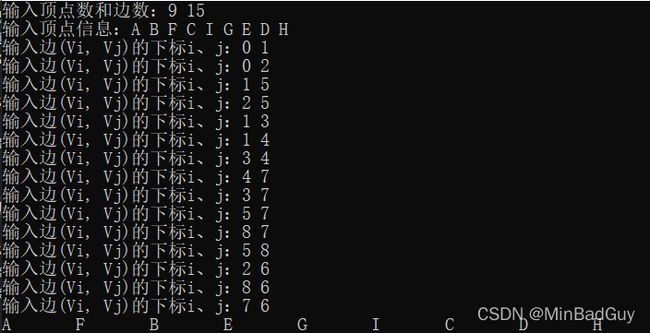
2.2 邻接表的BFS
#include 运行结果:
以《大话数据结构》图7-5-3的无向图为例。
3.参考书籍
大话数据结构-程杰
青岛大学数据结构-王卓