【数据结构】基础:图的遍历实现(附C++源代码)
【数据结构】基础:图的遍历实现(附C++源代码)
摘要:将会在数据结构专题中开展关于图论的内容介绍,其中包括四部分,分别为图的概念与实现、图的遍历、图的最小生成树以及图的最短路径问题。本文将介绍图的遍历,分别为深度优先遍历和广度优先遍历,需要了解其实现实现与方法。
文章目录
- 【数据结构】基础:图的遍历实现(附C++源代码)
-
- 前言:图的实现方式
- 一、广度优先遍历(BFS)
- 二、深度优先遍历(DFS)
前言:图的实现方式
本文中图的实现方法为邻接矩阵法,以下是对其类的基本描述,若需查看更加具体的内容,可以参考博客图的概念与基本实现。其重点可以概括为:
- Direction:表示是否为有向图
- _vertexs:记录了对应检索下的顶点元素
- _vIndexMap:记录了检索与顶点的对应关系
- _matrix:表示邻接矩阵
具体代码如下:
template<class V, class W, bool Direction = false, W MAX_WEIGHT = INT_MAX>
class Graph {
typedef Graph<V, W, Direction, MAX_WEIGHT> Self;
private:
vector<V> _vertexs; // 顶点集合
map<V, int> _vIndexMap; // 顶点检索
vector<vector<W>> _matrix; // 邻接矩阵
public:
Graph() = default;
Graph(const V* vertexs,size_t vertexSize) {
_vertexs.reserve(vertexSize);
for (size_t i = 0; i < vertexSize; i++) {
_vertexs.push_back(vertexs[i]);
_vIndexMap[vertexs[i]] = i;
}
// 格式化
_matrix.resize(vertexSize);
for (auto& e : _matrix) {
e.resize(vertexSize, MAX_WEIGHT);
}
//for (size_t i = 0; i < _matrix.size(); i++) {
// _matrix[i][i] = 0;
//}
}
size_t GetVertexIndex(const V& v) {
auto ret = _vIndexMap.find(v);
if (ret != _vIndexMap.end()) {
return ret->second;
}
else {
throw invalid_argument("不存在的顶点");
return -1;
}
}
void AddEdge(const V& src, const V& dest, const W& weight) {
size_t srcIndex = GetVertexIndex(src);
size_t destIndex = GetVertexIndex(dest);
AddEdgeByIndex(srcIndex, destIndex, weight);
}
void AddEdgeByIndex(size_t srcIndex, size_t destIndex, const W& weight){
_matrix[srcIndex][destIndex] = weight;
if (Direction == false) {
_matrix[destIndex][srcIndex] = weight;
}
}
};
一、广度优先遍历(BFS)
概述:BFS,其英文全称是Breadth First Search,广度优先搜索是一种分层查找的过程。由于需要使用到分层查找,将会借助队列来帮助遍历。而为了避免重复访问的状况,借助一个容器,来记录访问状况。

算法实现:
- 将起点入队列,设置其为已访问的标识
- 对于队列进行空判断,若不为空,访问队列头并出队列,设置已访问标识。再通过邻接矩阵访问其邻接节点,并入队列
- 重复该过程直至队列为空
由于是广度优先遍历,可以对其添加层与层之间的关系,在此通过levelSize和level实现,具体操作为在起点入队列后,对于levelSize设置为1,每次遍历了levelSize个节点后,对于levelSize进行更新为队列的元素个数,同时更新level。
代码如下:
void BFS(const V& src) {
queue<int> q;
vector<bool> visited(_vertexs.size(), false);
int srcIndex = GetVertexIndex(src);
q.push(srcIndex);
visited[srcIndex] = true;
int levelSize = 1;
int level = 1;
while (!q.empty()) {
cout << "层高:" << levelSize << " 层数:" << level << endl;
for (size_t i = 0; i < levelSize; i++) {
int front = q.front();
q.pop();
cout << "[" <<front << "|" << _vertexs[front] << "] ";
for (size_t j = 0; j < _vertexs.size(); j++) {
if (visited[j] == false && _matrix[front][j] != MAX_WEIGHT
&& _matrix[front][j] != 0) {
q.push(j);
visited[j] = true;
}
}
}
cout << endl;
levelSize = q.size();
level++;
}
}
测试用例:
void TestBFSGraph() {
Graph<char, int, true> g("0123", 4);
g.AddEdge('0', '1', 1);
g.AddEdge('0', '3', 4);
g.AddEdge('1', '3', 2);
g.AddEdge('1', '2', 9);
g.AddEdge('2', '3', 8);
g.AddEdge('2', '1', 5);
g.AddEdge('2', '0', 3);
g.AddEdge('3', '2', 6);
cout << endl;
g.Print();
cout << endl;
g.BFS('3');
}

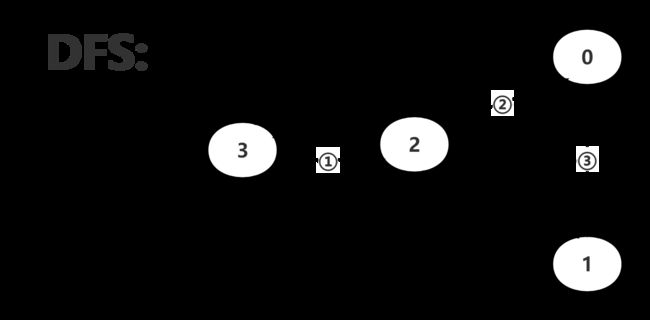
二、深度优先遍历(DFS)
概述:DFS 全称是 Depth First Search,中文名是深度优先搜索,是一种用于遍历或搜索树或图的算法。所谓深度优先,就是说每次都尝试向更深的节点走。该算法实现可以转换为子问题求解,即使用递归完成该遍历方式。
算法实现:
- 为了避免重复访问的情况,在此设定一个visited容器记录结点是否被访问。
- 算法的主题思路是使用递归完成,在递归访问一个结点后,通过邻接矩阵在此邻接点进行递归访问,直至访问完毕位置
- 同时在每次访问时需要对visited容器中是否访问进行修改为真。
- 为了防止出现多个森林的情况,在递归调用完起点后,进行对每个节点的再递归调用
代码如下:
void DFS(const V& src) {
size_t srcIndex = GetVertexIndex(src);
vector<bool> visited(_vertexs.size(), false);
_DFS(srcIndex, visited);
cout << "nullptr" << endl;
// 但不是连通图的时候
for (size_t i = 0; i < _vertexs.size(); i++) {
if (visited[i] == false) {
_DFS(i, visited);
cout << " nullptr" << endl;
}
}
}
void _DFS(int srcIndex, vector<bool>& visited) {
visited[srcIndex] = true;
cout << "[" << srcIndex << "|" << _vertexs[srcIndex] << "] -> ";
for (size_t i = 0; i < _vertexs.size(); i++) {
if (_matrix[srcIndex][i] != MAX_WEIGHT && _matrix[srcIndex][i] != 0 && visited[i] == false) {
_DFS(i, visited);
}
}
}
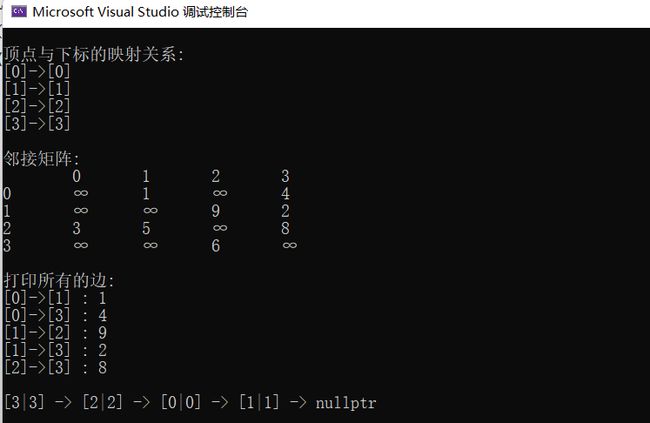
测试用例:
void TestDFSGraph() {
Graph<char, int, true> g("0123", 4);
g.AddEdge('0', '1', 1);
g.AddEdge('0', '3', 4);
g.AddEdge('1', '3', 2);
g.AddEdge('1', '2', 9);
g.AddEdge('2', '3', 8);
g.AddEdge('2', '1', 5);
g.AddEdge('2', '0', 3);
g.AddEdge('3', '2', 6);
cout << endl;
g.Print();
cout << endl;
g.DFS('3');
}
补充:
- 代码将会放到:C++/C/数据结构代码链接 ,欢迎查看!
- 欢迎各位点赞、评论、收藏与关注,大家的支持是我更新的动力,我会继续不断地分享更多的知识!