现代机器人(Modern Robotics):力学,规划,控制读书笔记
现代机器人:力学,规划,控制读书笔记
在csdn上传主要是可以换积分,文章乱码比较多,有用的话可以来知乎看,目录链接如下,感兴趣可以来看:
现代机器人:力学,规划,控制(chapter1)内容简介 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369236960
Content:
Chapter1:Preview
Chapter2:Configuration Space完成,链接:
现代机器人学:力学,规划,控制(chapter2)自由度计算,拓扑学表示,三大空间 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369268801
Chapter3:Rigid-Body Motions完成,链接:
现代机器人学:力学,规划,控制(chapter3 Ⅰ)基础知识,旋转矩阵,角速度 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369361857
现代机器人学:力学,规划,控制(chapter3 Ⅱ)指数坐标,矩阵对数,转换矩阵 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369531695
现代机器人学:力学,规划,控制(chapter3 Ⅲ)运动旋量和力旋量 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369718204
Chapter4:Forward Kinematics完成,链接:
现代机器人:力学,规划,控制(chapter4)正运动学 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369819171
Chapter5:Velocity Kinematics and Statics完成,链接如下:
现代机器人:力学,规划,控制(chapter5 Ⅰ)可操纵性椭球和力椭球初步,机器人的雅克比矩阵 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/370330062
现代机器人:力学,规划,控制(chapter5 Ⅱ)开链机器人静力学,奇点分析,可操纵性椭球和力椭球详解 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/371225559
Chapter6:Inverse Kinematics完成,链接如下:
现代机器人:力学,规划,控制(chapter6)逆运动学 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/371464848
Chapter7:Kinematics of Closed Chains完成,链接如下:
现代机器人:力学,规划,控制(chapter7)闭链机器人的运动学 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/371805130
Chapter8:Dynamics of Open Chains更新中,链接如下:
现代机器人:力学,规划,控制(chapter8)开链机器人的动力学 - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/372696918
Chapter9:Trajectory Generation
Chapter10:Motion Planning
Chapter11:Robot Control
Chapter12:Grasping and Manipulation
Chapter13:Wheeled Mobile Robots
Reference:
[1] Frank C. Park; Kevin M. Lynch,Modern Robotics: Mechanics, Planning, and Control,Cambridge University Press,United Kingdom,2017
注:英文原版书的获取途径有很多,比如Library Genesis等,大家可以在知乎搜索“推荐几个下载英文原版电子书的网站”类似的关键词来找
[2] 孙恒,陈作模,葛文杰.机械原理(第八版)[M].高等教育出版社,2013:195-260
读书笔记以梳理Modern Robotics: Mechanics, Planning, and Control,Cambridge University Press的主要内容为主。
每一个chapter的链接会放在文章末尾,不断更新中
在csdn上传主要是可以换积分,文章乱码比较多,有用的话可以来知乎看
Content:
Chapter1:Preview
Chapter2:Configuration Space
Chapter3:Rigid-Body Motions
Chapter4:Forward Kinematics
Chapter5:Velocity Kinematics and Statics
Chapter6:Inverse Kinematics
Chapter7:Kinematics of Closed Chains
Chapter8:Dynamics of Open Chains
Chapter9:Trajectory Generation
Chapter10:Motion Planning
Chapter11:Robot Control
Chapter12:Grasping and Manipulation
Chapter13:Wheeled Mobile Robots
Chapter1:Preview
本章主要对全书各章涉及内容做出阐述和讲解,同时让读者建立起对机器人的宏观认识。
作为一门学科,机器人技术是一个相对年轻的领域,有着远大的目标,最终目标是创造出能够像人类一样行为和思考的机器。这本书的书名简洁明了,本书重点是力学,规划和控制。例如:机械手,轮式机器人等等。
首先,我们应该理解什么是机构,机构的组成是什么?
在引出机构定义之前,需要先介绍一个名词:运动链(kinematic chain),运动链是通过运动副的连接而构成的可相对运动的系统。
运动链中又出现了两个新名词:
构件:任何机器都由许多零件组合而成,刚性连接的零件们共同组成一个独立运动单元体,机器中每一个独立的运动单元称为一个构件(link)
运动副:由两个构件直接接触而组成的可动连接称为运动副(kinematic pair)
因此,我们现在可以回答机构是什么,机构是指在运动链中,如果将其中某一构件固定为机架(fixed link),该运动链就形成了机构。
对于机器人机构来说,连杆可以串联排列,如常见的开链臂,如图1所示,也可以有形成闭环的链接,如图2所示的Stewart-Gough平台。在开链的情况下,所有关节都被驱动,而在闭环机构的情况下,只有一个子集的关节可以被驱动。
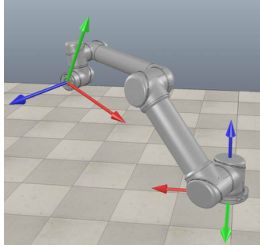
图1 开链机械臂

图2 Stewart-Gough平台
机器人的连杆由执行器移动,这些执行器通常由电力驱动(例如,由直流或交流电机、步进电机或形状记忆合金),也可以由气动或液压缸驱动。由于目前大多数可用的电机转速较高,传动设计就很重要,如齿轮传动,带传动,滑轮传动,链传动等。同时当机器人不工作时,让机器人保持静止或要求机器人快速停止就对传动设计提出了要求。
机器人是一个复杂机电系统,配备了各种传感器来测量关节的运动,对于转动关节和移动关节,编码器、电位器或旋转器测量位移,转速计测速度,各种类型的力-力矩传感器用以测量机器人关节或末端执行器的力和力矩。额外的传感器可以用来帮助定位物体或机器人本身,如视觉摄像头,RGB-D摄像头,激光测距仪,以及各种类型的声学传感器等。
本书的章节都是把机器人当做刚体系统来讨论的,这是基本的一个假设。
Chapter2:Configuration Space,本章主要介绍机器人系统的配置,自由度的计算,C空间的拓扑结构及工作空间的定义等等,之后会详细介绍。
Chapter3:Rigid-Body Motions,本章讨论如何用数学方法描述一个刚体在三维物理空间中运动的问题。
Chapter4:Forward Kinematics,本章介绍正运动学,其是在给定关节位置集合的情况下,求固联在末端执行器的坐标系的位置和姿态。本章将给出描述开链正运动学的PoE公式,同时在附录中还会讨论正运动学的Denavit-Hartenberg (D-H)表示,以及PoE与D-H的转换。
Chapter5:Velocity Kinematics and Statics,本章主要讲解关节线速度和角速度与末端执行器坐标系的线速度和角速度之间的关系,本章需要关注的重点是正运动学的雅可比矩阵。
Chapter6:Inverse Kinematics,本章介绍逆运动学,逆运动学问题是确定一组关节位置,以实现一个期望的末端执行器配置。
Chapter7:Kinematics of Closed Chains,开链机构有独特的正运动学解,而闭链机构通常有多个正运动学解,有时甚至还有多个逆运动学解。此外,由于闭链同时具有驱动和被动关节,闭链的运动奇异性分析与开链完全不同。本章将介绍闭链运动分析的基本概念和工具,以平面五杆机构和Stewart-Gough平台为例,结果会被推广成一个系统的方法,用于更一般的闭链的运动分析。
Chapter8:Dynamics of Open Chains,本章如章名,对开链机构的动力学进行研究,主要就是对欧拉-拉格朗日方程与牛顿-欧拉法的讨论。
Chapter9:Trajectory Generation,本章讨论如何生成机器人的运动轨迹。
Chapter10:Motion Planning,本章讨论如何在杂乱的工作空间中寻找机器人的无碰撞运动,同时避免关节限制、执行器限制和其他强加给机器人的物理约束,核心便是路径规划问题
Chapter11:Robot Control,机器人控制方法多种多样,本章会研究运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
Chapter12:Grasping and Manipulation,前面几章的重点是描述、规划和控制机器人本身的运动,但机器人必须能够操纵其环境中的物体。在本章中对机器人和物体之间的接触进行了建模,研究了通过形状闭合和力闭合抓取来选择触点来固定物体,还将接触建模应用于除抓握之外的问题,如推动物体、动态携带物体和测试机器人的稳定性。
Chapter13:Wheeled Mobile Robots,最后一章会讨论轮式移动机器人和配备机械臂的轮式移动机器人的运动学、运动规划和控制。