相机标定(三)-相机成像模型
>>>文章索引<<<
相机标定(一)-原理及内参、外参
相机标定(二)-畸变校正,张正友标定法
相机标定(三)-相机成像模型
1 人眼&相机结构
1.1 类比

类比来说,相机就是计算机的“眼睛”:

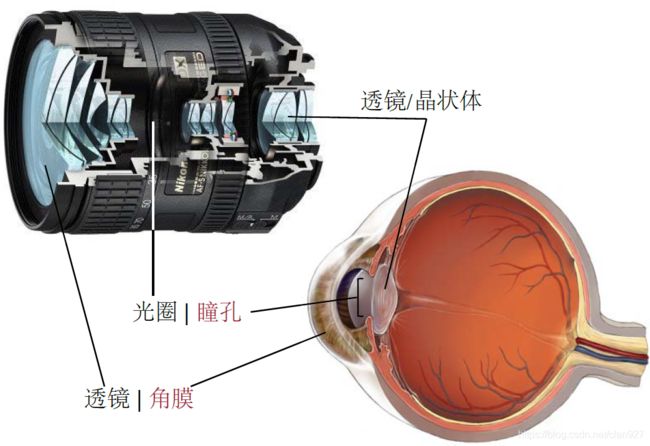

1.2 成像
本质上来说,图像是真实世界场景中在二维平面(成像平面)的投影,它记录了两类信息:
- 几何信息:位置、点、线等;
- 光度信息:强度、色彩。
2 相机成像模型
- 小孔成像模型(Pinhole camera model)
- 正交投影(Orthographic projection)
- 缩放正交投影(Scaled orthographic projection)
- 透视投影(Perspective projection)
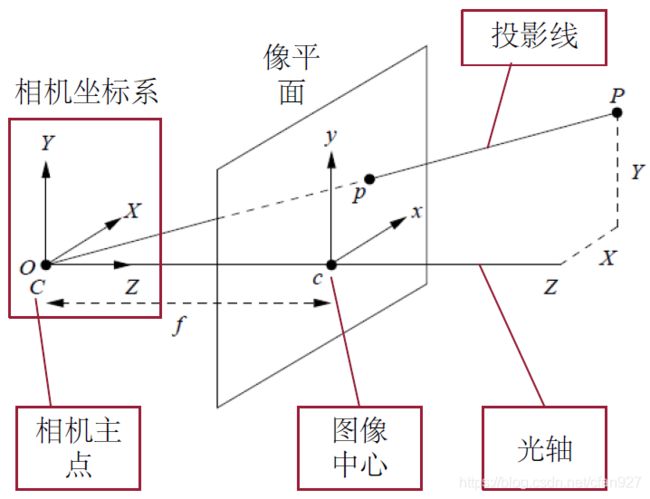
2.1 小孔成像模型(Pinhole camera model)

数学表示,具体也可参考博客:
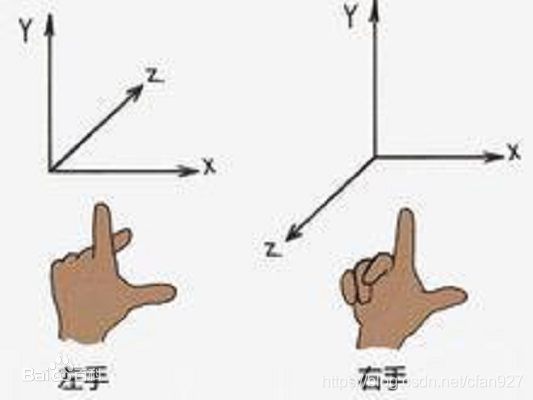
一般来说,我们使用右手坐标系:
小孔成像模型实际上是透视投影(perspective projection)的一种最简单的形式。假设我们要将真实世界中的三维点 ( X , Y , Z ) T (X,Y,Z)^T (X,Y,Z)T投影为二维图像上的点 p = ( x , y ) T p=(x,y)^T p=(x,y)T,则有:
{ X Z = x f Y Z = y f ⇒ { x = f X Z y = f Y Z (1) \begin{cases} \frac{X}{Z}=\frac{x}{f} \\ \frac{Y}{Z}=\frac{y}{f} \end{cases} \Rightarrow \begin{cases} x=f\frac{X}{Z} \\ y=f\frac{Y}{Z} \end{cases} \tag{1} {ZX=fxZY=fy⇒{x=fZXy=fZY(1)
2.2 正交投影(Orthographic projection)
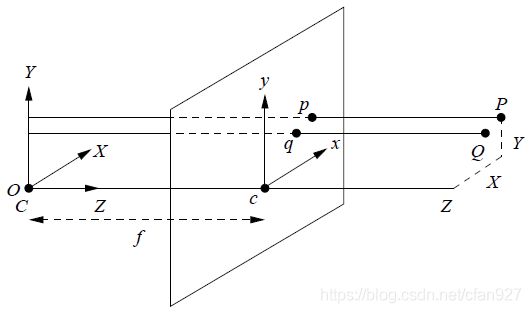
- 3D场景距离相机无限远;
- 所有投影线均平行于光轴。
则有 x = X , y = Y x=X, y=Y x=X,y=Y。
2.3 缩放正交投影(Scaled orthographic projection)

- 场景深度<<到相机的距离;
- 场景中所有点的Z值均相同,如 Z 0 Z_0 Z0。
这种情况相当于对垂直于相机Z轴方向上的一个平面场景进行成像,则对于场景中所有的点有: x = s X , y = s Y , s = f Z 0 x=sX, y=sY, s=\frac{f}{Z_0} x=sX,y=sY,s=Z0f。
2.4 透视投影(Perspective projection)

3 相机参数
对于小孔成像模型中,有:
{ x = f X Z y = f Y Z (2) \begin{cases} x=f\frac{X}{Z} \\ y=f\frac{Y}{Z} \end{cases} \tag{2} {x=fZXy=fZY(2)
3.1 相机内参
上述为理想状态下的公式,下面来分析几种特殊情况。
3.1.1 像素不是正方形
当相机传感器(CCD)上的像素不是正方形时有:
{ x = k f X Z y = l f Y Z (3) \begin{cases} x=kf\frac{X}{Z} \\ y=lf\frac{Y}{Z} \end{cases} \tag{3} {x=kfZXy=lfZY(3)
- x,y:坐标(pixel);
- k,l:缩放因子(pixel/mm)
- f:焦距(mm)
令上式中: f x = k f , f y = l f f_x=kf, f_y=lf fx=kf,fy=lf,则有:
{ x = f x X Z y = f y Y Z (4) \begin{cases} x=f_x\frac{X}{Z} \\ y=f_y\frac{Y}{Z} \end{cases} \tag{4} {x=fxZXy=fyZY(4)
3.1.2 相机主点(principal point)不在原点
即光轴与CCD中心有偏移。假设主点在图像上的坐标(像素)为 c x , c y c_x, c_y cx,cy,则有:
{ x = f x X Z + c x y = f y Y Z + c y (5) \begin{cases} x=f_x\frac{X}{Z}+c_x \\ y=f_y\frac{Y}{Z}+c_y \end{cases} \tag{5} {x=fxZX+cxy=fyZY+cy(5)
那么沿着相机的Z轴,有 X = Y = 0 X=Y=0 X=Y=0, x = c x , y = c y x=c_x, y=c_y x=cx,y=cy。
3.1.3 x轴与y轴不垂直
理想情况下,x轴与y轴是相互垂直的,但一般情况下,x轴和y轴的夹角并不是90度。假设x轴和y轴之间的夹角为 θ \theta θ,则有:
{ x = f x X Z − f x c o t θ Y Z + c x y = f y s i n θ Y Z + c y (6) \begin{cases} x=f_x\frac{X}{Z}-f_x cot\theta \frac{Y}{Z}+c_x \\ y=\frac{f_y}{sin\theta}\frac{Y}{Z}+c_y \end{cases} \tag{6} {x=fxZX−fxcotθZY+cxy=sinθfyZY+cy(6)
3.1.4 内参矩阵
组合所有参数,可以得到相机的内参矩阵 K K K:
K = [ f x − f x c o t θ c x 0 f y s i n θ c y 0 0 1 ] = [ f x s c x 0 f y c y 0 0 1 ] (7) K= \begin{bmatrix} f_x & -f_xcot\theta & c_x \\ 0 & \frac{f_y}{sin\theta} & c_y \\ 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} f_x & s & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \tag{7} K=⎣⎡fx00−fxcotθsinθfy0cxcy1⎦⎤=⎣⎡fx00sfy0cxcy1⎦⎤(7)
3.2 相机外参
相机外参反映了相机在世界坐标空间中的位姿,可通过一个刚性变换来表示,通常包含平移 T T T和旋转 R R R。
平移矩阵:
T = [ T X T Y T Z ] (8) T= \begin{bmatrix} T_X \\ T_Y \\ T_Z \end{bmatrix} \tag{8} T=⎣⎡TXTYTZ⎦⎤(8)
旋转矩阵:
R = [ r 1 1 r 1 2 r 1 3 r 2 1 r 2 2 r 2 3 r 3 1 r 3 2 r 3 3 ] (9) R= \begin{bmatrix} r_11 & r_12 & r_13 \\ r_21 & r_22 & r_23 \\ r_31 & r_32 & r_33 \end{bmatrix} \tag{9} R=⎣⎡r11r21r31r12r22r32r13r23r33⎦⎤(9)
旋转矩阵是正交的,所以有: R T R = I R^TR=I RTR=I。
4 畸变
畸变是光学透镜固有的透视失真特性,目前所有的镜头都存在畸变,只是程度不同。畸变又分为径向畸变和切向畸变,这里只以径向畸变为例。常见的径向畸变有桶形畸变、枕形畸变等:

径向畸变可以被建模为:

具体的畸变校正过程可以参考博客。
5 相机标定
相机标定的目的就是获取前文提到的相机内参、外参和畸变系数。通常,标定方法分为两步:(1)从不同角度捕获棋盘格图像;(2)检测角点并计算相机参数。


可使用OpenCV或其他相机标定程序来完成参数计算。
参考
[1] 一个pdf,下载地址找不到了=_=