实验 4:排序与查找
- 东莞理工的学生可以借鉴,请勿抄袭
1.实验目的
通过实验达到:
-
理解典型排序的基本思想,掌握典型排序方法的思想和相应实现算法;
-
理解和掌握用二叉排序树(BST)实现动态查找的基本思想和相应的实现 算法。
-
理解和掌握哈希(HASH)存储结构的基本思想、哈希查找的思想、实现;
-
掌握典型查找、排序算法的算法分析。
2. 题目 1:排序
① 用 C 的 rand 函数随机生成若干个(例如 20-1000 个)在某个区间(例如 [0, 10000])之间的整数保存数组中,以此数组元素作为关键字;
② 采用堆排序算法按非递增方式(从大到小)进行排序,给出操作的结果 及相应的操作次数(比较次数、移动次数);
③ 采用快速排序算法按非递增方式(从大到小)进行排序,给出操作的结 果及相应的操作次数; ④ 采用归并排序算法按非递增方式(从大到小)进行排序,给出操作的结 果及相应的操作次数;
⑤ 主函数通过调用函数实现以上操作。
附加题:(每完成一个额外附加 5 分,上限 10 分)
① 10-27 设带头结点的单链表 L 中存放着要排序的 int 类型的若干个数据 元素,编写函数实现单链表存储结构的冒泡排序。
② 10-28 设带头结点的单链表 L 中存放着要排序的 int 类型的若干个数据 元素,编写函数实现单链表存储结构的直接选择排序。
③ 10-29 基数排序算法设计。
要求:
(1)设计基于顺序队列的基数排序函数。
(2)设计一个测试主函数,测试所设计的基于顺序队列的基数排序函数。
2.1. 数据结构设计
整形数组
2.2. 主要操作算法设计与分析
2.2.1. 获取随机数数组方法
int* createRandom()
返回类型:int*;
是否有参数:无
步骤:
- 通过srand和rand配合获取随机数(mod 10001)
- 用for循环获取N个
算法时间复杂度:
- 时空复杂度为O(N);
2.2.2 打印数组函数
void display(int elem[])
返回类型:无;
是否有参数:无
步骤:
- 遍历数组打印每一个元素
算法时间复杂度:
- 时间复杂度为O(N);
2.2.3. 堆排序函数
void heapSort(int elem[])
void createHeap(int elem[])
void shiftDown(int* elem, int root, int len)
返回类型:无返回值;
是否有参数:有,待排序数组
步骤:
- 调用createHeap对elem数组进行建堆操作
- 从(N - 2) / 2开始到0,对elem进行向下过滤的调整堆shiftDown操作
- 循环结束排序完成
算法时间复杂度:
- 时间复杂度为O(Nlog2N);
2.2.4. 快速排序
void quickSort(int* arr)
void quick(int* arr, int left, int right)
int partition(int* arr, int left, int right)
int findMid(int* arr, int left, int right)
返回类型:无返回值;
是否有参数:有,待排序数组
步骤:
- 调用递归函数quick,传入left 0,right N-1
- 如果left大于等于right,直接返回
- 调用findMid找到数组的left到right这一部分数组中的中间值下标(三值取中),找到后这个下标与第一个元素进行交换
- 调用partition函数,进行快排划分,返回一个基准值pivot
- 调用quick,传入arr,左半部分
- 调用quick,传入arr,右半部分
算法时间复杂度:
- 时间复杂度为O(Nlog2N);
2.2.5. 归并排序函数
void mergeSort(int* arr)
void mergeSorter(int* arr, int left, int right)
void merge(int* arr, int left, int right, int mid)
无返回值,有参数,待排序数组
步骤:
- 调用递归函数mergeSorter,传入arr,left,right
- 获得left和right中间值,mid
- 调用merge函数,传入arr,left,right,和mid
- 合并有序顺序表操作
- 将左半部分和右半部分进行重复操作
- 最终排序完毕
复杂度分析:
时间复杂度:O(Nlog2N)
2.2.6. 主函数设计
int main() {
int* arr = createRandom();
heapSort(arr);
printf("比较次数:%d, 交换次数:%d\n", compareCount, moveCount);
display(arr);
free(arr);
arr = createRandom();
quickSort(arr);
printf("快排划分次数:%d\n", quickSortCount);
display(arr);
free(arr);
arr = createRandom();
mergeSort(arr);
printf("归并次数:%d\n", mergeCount);
display(arr);
free(arr);
return 0;
}
2.3. 程序运行过程及结果
3. 题目 2:二叉排序树(Binary Sort Tree, BST)的建立及动态查 找
生成若干个(比如 50 个)在某个区间(例如[-1000, 1000])之间互不相同的 整数保存在数组 A 中,以此数组元素作为关键字,设计实现以下操作的程序:
① 建立对应的二叉排序树,按中序遍历算法输出所建立的 BST 树的结点;
② 对该二叉排序树,查找指定的关键字(输入要查找的整数),给出操作 的结论及相应的操作次数(比较次数);
③ 对该二叉排序树,删除指定的关键字(输入要删除的整数),给出操作 的结论及相应的操作次数;
④ 按中序遍历算法输出二叉排序树的所有结点;
⑤ 主函数通过调用函数实现以上操作。
3.1. 数据结构设计
struct TreeNode {
int val;
struct TreeNode* left;
struct TreeNode* right;
};
3.2. 主要操作算法设计与分析
3.2.1 创建以及中序遍历
void freeTree(struct TreeNode* root):
该函数用于释放二叉树的内存空间,它的具体步骤是:
- 如果传入的 root 指针为空,则直接返回。
- 否则,递归地释放其左子树的空间。
- 接着,递归地释放其右子树的空间。
- 最后,释放当前节点的空间。
void inorderTraversal(struct TreeNode* root):
该函数用于对二叉树进行中序遍历,并将节点的值依次输出到控制台中,具体步骤是:
- 如果传入的 root 指针为空,则直接返回。
- 否则,以递归的方式,先遍历左子树。
- 然后输出当前节点的值。
- 最后以递归的方式,遍历右子树。
算法时间复杂度:
- 时空复杂度为O(N);
3.2.2 查找函数
该代码实现了在二叉搜索树中查找目标节点的功能,具体步骤如下:
-
如果传入的根节点指针 root 为空或者根节点的值就是目标值 target,那么增加一次比较次数
cmp的计数器,并返回根节点指针 root。 -
如果目标值 target 小于根节点的值,那么增加两次比较次数
cmp的计数器,然后递归地对根节点的左子树进行搜索。 -
否则,增加两次比较次数
cmp的计数器,然后递归地对根节点的右子树进行搜索。
在这个过程中,计数器 cmp 用于记录比较目标值的次数,最终返回的是查找到的目标节点的指针,如果没有找到目标节点,返回空指针。
算法时间复杂度:
- 时空复杂度为O(log2N);
3.2.3. 插入函数
struct TreeNode* insert(struct TreeNode* root, int val, int* cmp)
该代码实现了往二叉搜索树中插入一个节点的功能,具体说明如下:
传入参数:
- root: 指向二叉搜索树根节点的指针。
- val: 待插入的节点的值。
- cmp: 指向用于记录比较次数的计数器的指针。
返回值:
- 返回指向插入节点后的二叉搜索树根节点的指针。
具体步骤:
-
如果传入的根节点指针 root 为空,则增加一次比较次数
cmp的计数器,并为新节点分配内存空间,然后创建该新节点,并将其左右指针都置为空,最后返回该新节点的指针。 -
如果目标值 val 小于根节点的值,则增加两次比较次数
cmp的计数器,然后递归地将节点插入到根节点的左子树中,然后将该节点的左子节点指针指向递归返回的节点的指针。 -
否则,增加两次比较次数
cmp的计数器,然后递归地将节点插入到根节点的右子树中,然后将该节点的右子节点指针指向递归返回的节点的指针。
算法时间复杂度:
- 时空复杂度为O(log2N);
3.2.4 删除函数
struct TreeNode* delete(struct TreeNode* root, int target, int* cmp)
该代码实现了从二叉搜索树中删除一个节点的功能,具体说明如下:
传入参数:
- root: 指向二叉搜索树根节点的指针。
- target: 待删除节点的值。
- cmp: 指向用于记录比较次数的计数器的指针。
返回值:
- 返回指向删除节点后的二叉搜索树根节点的指针。
具体步骤:
-
如果传入的根节点指针 root 为空,则增加一次比较次数
cmp的计数器,并返回空指针。 -
如果目标值 target 小于根节点的值,则增加两次比较次数
cmp的计数器,然后递归地从根节点的左子树中删除目标节点,并将根节点的左子节点指针指向递归返回的节点的指针。 -
否则,如果目标值 target 大于根节点的值,则增加两次比较次数
cmp的计数器,然后递归地从根节点的右子树中删除目标节点,并将根节点的右子节点指针指向递归返回的节点的指针。 -
如果目标值 target 等于根节点的值,则判断根节点是否存在左右子树:
- 如果不存在左子树,则直接将根节点的右子树作为新的根节点,然后释放原根节点的内存空间。
- 如果不存在右子树,则直接将根节点的左子树作为新的根节点,然后释放原根节点的内存空间。
- 如果既有左子树又有右子树,则找到右子树中最小(或左子树中最大)的节点 cur,把其值赋给根节点,然后递归地从右子树中删除该最小节点的值,将根节点的右子节点指针指向递归返回的节点的指针。
算法时间复杂度:
- 时间空间复杂度为O(log2N);(准确的来说是树的高度)
3.2.5. 主函数设计
int main() {
int n = 50; // 数组元素个数
int* arr = (int*)malloc(n * sizeof(int));
srand(time(NULL));
for (int i = 0; i < n; i++) {
arr[i] = rand() % 2001 - 1000; // 随机生成-1000至1000之间的整数
for (int j = 0; j < i; j++) { // 把相同的数过滤掉
if (arr[i] == arr[j]) {
i--;
break;
}
}
}
struct TreeNode* root = NULL;
int cmp = 0;
for (int i = 0; i < n; i++) {
root = insert(root, arr[i], &cmp);
}
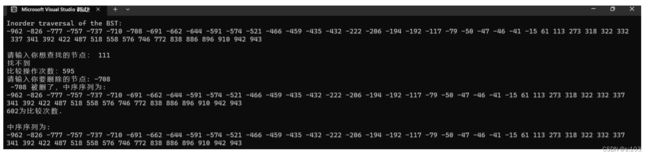
printf("Inorder traversal of the BST:\n");
inorderTraversal(root);
printf("\n\n");
int target;
printf("请输入你想查找的节点: ");
scanf("%d", &target);
struct TreeNode* found = search(root, target, &cmp);
if (found == NULL) {
printf("找不到\n");
}
else {
printf("Element %d 被找到了\n", found->val);
}
printf("比较操作次数:%d \n", cmp);
int delete_val;
printf("请输入你要删除的节点: ");
scanf("%d", &delete_val);
root = delete(root, delete_val, &cmp);
if (root == NULL) {
printf("树空了!");
}
else {
printf(" %d 被删了,中序序列为:\n", delete_val);
inorderTraversal(root);
}
printf("\n%d为比较次数.\n", cmp);
printf("\n中序序列为:\n");
inorderTraversal(root);
printf("\n");
freeTree(root);
free(arr);
return 0;
}
3.3. 程序运行过程及结果
4. 题目 3:哈希表(HASH)的建立及查找(选做题)
4.1. 数据结构设计
const int MAX_CAPACITY = 20; // 哈希表大小
const int PRIME_NUM = 17; // 哈希函数的p值
// 哈希表节点
struct Node {
int val;
struct Node* next;
};
4.2. 主要操作算法设计与分析
4.2.1 创建函数
hashFunc 函数:
传入参数:
- key: 待哈希的关键字。
返回值:
- 哈希函数计算出的哈希值。
步骤:
- 对传入的关键字 key 取模 PRIME_NUM,然后再加上 PRIME_NUM,最后再对 PRIME_NUM 取模,得到哈希函数的计算结果。
createNode 函数:
传入参数:
- val: 新节点的值。
返回值:
- 指向新节点的指针。
步骤:
- 分配一个大小为 struct Node 的内存空间 node。
- 将节点的 val 值设为传入的值 val。
- 将节点的 next 指针设为空指针。
- 返回指向新节点的指针。
这两个函数的时间复杂度和空间复杂度都比较低,hashFunc 函数的时间复杂度为 O(1),createNode 函数的时间复杂度也为 O(1),它们的空间复杂度也都为 O(1)。
4.2.2 查找函数
// 查找哈希表中值为target的节点,返回该节点所在的哈希表位置(下标) int search(struct Node** hashTable, int target, int* cmp)
传入参数:
- hashTable: 指向哈希表首地址的指针。
- target: 待查找的值。
- cmp: 指向用于记录比较次数的计数器的指针。
返回值:
- 如果在哈希表中找到了值为 target 的节点,则返回该节点所在的哈希表位置(下标)。
- 如果在哈希表中没有找到值为 target 的节点,则返回 -1。
步骤:
- 首先根据哈希函数计算出待查找值 target 的哈希表位置 index。
- 然后在哈希表的 index 位置处查找与 target 相等的节点。
- 如果找到了与 target 相等的节点,则直接返回该节点所在的哈希表位置 index。
- 如果没找到与 target 相等的节点,则将指针 cur 指向哈希表中下一个节点,继续比较,直到遍历完所有的节点。
- 如果最终仍未找到与 target 相等的节点,则返回 -1。
算法复杂度分析:
该函数的时间复杂度与平均每个位置的链表长度有关,为 O(1+K),其中 K 表示平均每个位置的链表长度。该函数的空间复杂度为 O(n),其中 n 表示哈希表中节点的数量。
4.2.3. 插入函数
void insert(struct Node** hashTable, int val, int* cmp)
该代码实现了往哈希表中插入一个新节点的功能,具体说明如下:
传入参数:
- hashTable: 指向哈希表首地址的指针。
- val: 待插入节点的值。
- cmp: 指向用于记录比较次数的计数器的指针。
返回值:
- 无返回值。
具体步骤:
- 首先根据哈希函数计算出待插入节点的哈希表位置 index。
- 如果该位置下的链表为空,则直接在该位置处创建一个新节点,并将该节点插入到链表的首位。
- 如果该位置下的链表不为空,则需要查找链表的末尾,然后在末尾处创建一个新节点,并将其插入到链表的末尾。
算法时间复杂度:
该函数的时间复杂度取决于链表长度,并且最坏情况的时间复杂度为 O(n),其中 n 表示链表的长度。该函数的空间复杂度取决于哈希表的大小和节点个数,因为哈希表中的每个位置都可能含有多个节点,所以空间复杂度最坏情况下为 O(n),其中 n 表示节点的数量。
4.2.4 删除函数
void delete(struct Node** hashTable, int target, int* cmp)
传入参数:
- hashTable: 指向哈希表首地址的指针。
- target: 待删除节点的值。
- cmp: 指向用于记录比较次数的计数器的指针。
返回值:
- 无返回值。
步骤:
- 首先根据哈希函数计算出值为 target 的节点所在的哈希表位置 index。
- 然后在哈希表的 index 位置处查找与 target 相等的节点 cur,如果 cur 节点不存在(即该位置下的链表为空),则直接返回。
- 如果 cur 节点恰好就是哈希表里的第一个节点,则将哈希表的 index 位置指向 cur 的下一个节点,然后释放 cur 指向节点的内存空间。
- 如果 cur 节点不是哈希表的第一个节点,则需要沿着链表继续查找,直到找到与 target 相等的节点 temp。
- 当找到与 target 相等的节点 temp 时,先将该节点的前一个节点 cur 的 next 指针指向 temp 节点的下一个节点,然后释放 temp 指向节点的内存空间即可。
算法时间复杂度:
- 该函数的时间复杂度取决于链表长度,并且最坏情况的时间复杂度为 O(n),其中 n 表示链表的长度。该函数的空间复杂度为 O(1)。
4.2.5. 输出哈希表
void printHashTable(struct Node** hashTable)
传入参数:
- hashTable: 指向哈希表首地址的指针。
返回值:
- 无返回值。
具体步骤:
- 遍历整个哈希表,对于每个位置 i,输出该位置对应的链表中所有节点的值。
注意:需要在每个节点的值之间输出空格,最后需要在每行输出结束后换行。
算法复杂度分析:
- 该函数的时间复杂度为 O(n),其中 n 表示哈希表中节点的数量。该函数的空间复杂度为 O(1)。
4.2.6. 主函数设计
int main() {
int n = 50; // 数组元素个数
int* arr = (int*)malloc(sizeof(int) * n);
srand(0);
for (int i = 0; i < n; i++) {
arr[i] = rand() % 901 + 100; // 随机生成100至1000之间的整数
for (int j = 0; j < i; j++) { // 把相同的数过滤掉
if (arr[i] == arr[j]) {
i--;
break;
}
}
}
struct Node* hashTable = (struct Node*)calloc(MAX_CAPACITY, sizeof(struct Node));
int cmp = 0;
// 建立哈希表
for (int i = 0; i < n; i++) {
insert(hashTable, arr[i], &cmp);
}
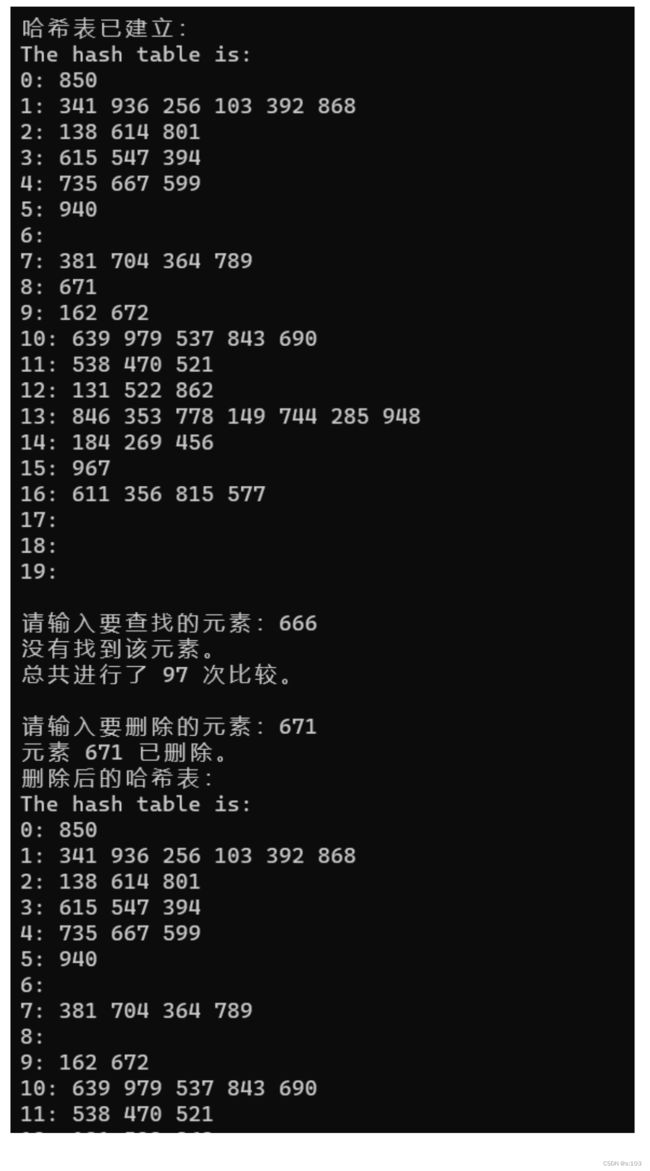
printf("哈希表已建立:\n");
printHashTable(hashTable); // 输出哈希表
printf("\n");
// 查找
int target;
printf("请输入要查找的元素:");
scanf("%d", &target);
int index = search(hashTable, target, &cmp);
if (index < 0) {
printf("没有找到该元素。\n");
}
else {
printf("找到了元素 %d,它在哈希表的位置是 %d。\n", target, index);
}
printf("总共进行了 %d 次比较。\n", cmp);
printf("\n");
// 删除
int delete_val;
printf("请输入要删除的元素:");
scanf("%d", &delete_val);
delete(hashTable, delete_val, &cmp);
printf("元素 %d 已删除。\n", delete_val);
printf("删除后的哈希表:\n");
printHashTable(hashTable); // 输出哈希表
printf("总共进行了 %d 次比较。\n", cmp);
free(arr);
free(hashTable);
return 0;
}
4.3. 程序运行过程及结果

5. 总结
- 快速排序使用分治策略实现,时间复杂度平均为 O(nlogn),但最坏情况下会退化为 O(n^2)。
- 归并排序同样也使用分治策略实现,时间复杂度稳定为 O(nlogn),但需要使用额外的空间存储中间结果。
- 堆排序的时间复杂度也为 O(nlogn),且不需要使用额外空间,但排序结果不稳定。
- 哈希表通过哈希函数将数据映射为连续空间上的一个位置,能够实现常数时间内的查找操作,但哈希函数的选择与负载因子会影响哈希表的性能。
- 搜索树通过以节点间的关系来描述数据之间的有序关系(如二叉搜索树),能够实现 O(logn) 的时间复杂度,但最坏情况下也可能变为 O(n)。不同的算法适用于不同的场景,需要根据具体应用场景结合时间和空间复杂度进行合理选择。
6. 附录:源代码
我已上传附件:“实验排序.zip”
码云链接:排序与查找