双目相机图像校正(五)
本文来自公众号:机器人视觉
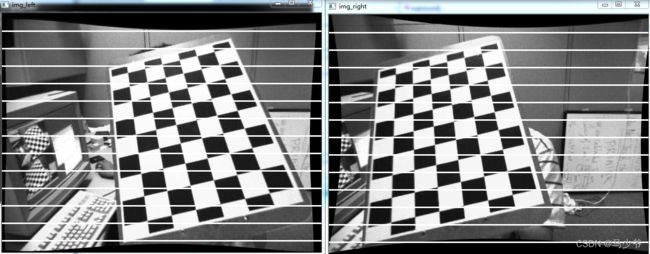
1、读取左右相机图像,使用Opencv和MATLAB标定结果对图像进行校正
//对焊缝图像进行校准
//load image
Mat img_left = imread("leftimage.bmp");
if (img_left.empty())
cout << "empty" << endl;
Mat img_right = imread("rightimage.bmp");
if (img_left.empty())
cout << "empty" << endl;
//相机标定
//相机参数
cv::Mat cam1intrinsics, cam1distCoeffs, cam2intrinsics, cam2distCoeffs, R, T;
cam2intrinsics = (cv::Mat_(3, 3) <<
3069.2482, -0.8951, 620.5357,
0, 3069.2450, 532.7122,
0, 0, 1
);
//cam2intrinsics = cam1intrinsics.t();
cam2distCoeffs = (cv::Mat_(5, 1) << -0.0593, 3.4501, 0.0003, -8.5614, 0);
cam1intrinsics = (cv::Mat_(3, 3) <<
3061.6936, -0.8869, 641.3042,
0, 3058.8751, 508.9555,
0, 0, 1
);
//cam1intrinsics = cam2intrinsics.t();
cam1distCoeffs = (cv::Mat_(5, 1) << -0.0133, 0.6503, 0.0029, -0.0049, 0);
//cv::Mat Rx;
R = (cv::Mat_(3, 3) << 0.9989, 0.0131, -0.0439,
-0.0121, 0.9996, 0.0233,
0.0441, -0.0228, 0.9987);
T = (cv::Mat_(3, 1) << -73.8389, 2.6712, 3.3792);
const int imageWidth = 1292; //摄像头的分辨率
const int imageHeight = 964;
Size imagesSize = Size(imageWidth, imageHeight);
//rectify
cv::Mat R1, R2, P1, P2, Q;
Rect validRoi[2];
stereoRectify(cam1intrinsics, cam1distCoeffs, cam2intrinsics, cam2distCoeffs, imagesSize, R, T, R1, R2, P1, P2, Q,
CALIB_ZERO_DISPARITY, -1, Size(imageWidth, imageHeight), &validRoi[0], &validRoi[1]);
Mat map1x, map1y, map2x, map2y;
initUndistortRectifyMap(cam1intrinsics, cam1distCoeffs, R1, P1, imagesSize, CV_32FC1, map1x, map1y);
initUndistortRectifyMap(cam2intrinsics, cam2distCoeffs, R2, P2, imagesSize, CV_32FC1, map2x, map2y);
remap(img_left, img_left, map1x, map1y, INTER_LINEAR);//重点!!!!!
remap(img_right, img_right, map2x, map2y, INTER_LINEAR);
//draw line
int i = 0;
while (i + 35 < img_left.rows)
{
i += 35;
for (int j = 0; j < img_left.cols; j++)
{
img_left.ptr(i)[j][0] = 255;
img_right.ptr(i)[j][0] = 255;
img_left.ptr(i)[j][1] = 255;
img_right.ptr(i)[j][1] = 255;
img_left.ptr(i)[j][2] = 255;
img_right.ptr(i)[j][2] = 255;
}
}
//imwrite("img_left1.bmp", img_left);//left image
imshow("img_left", img_left);//left image
//imwrite("img_right1.bmp", img_right);//left image
imshow("img_right", img_right);//right image
waitKey(100000);
system("pause");
程序new
//对图像进行校准
//load image
Mat img_left = imread("leftimage1.bmp",0);
if (img_left.empty())
cout << "empty" << endl;
Mat img_right = imread("rightimage1.bmp",0);
if (img_left.empty())
cout << "empty" << endl;
//相机标定
//相机参数
cv::Mat cam1intrinsics, cam1distCoeffs, cam2intrinsics, cam2distCoeffs, R, T;
cam2intrinsics = (cv::Mat_(3, 3) <<
3093.80948089389, 0, 635.282959025333,
0, 3093.31859709039, 538.353641774543,
0, 0, 1
);
//cam2intrinsics = cam1intrinsics.t();
cam2distCoeffs = (cv::Mat_(5, 1) << -0.0136408529341437,0.410972366786061,0.00141152267600137,0.00156479081987528,0);
cam1intrinsics = (cv::Mat_(3, 3) <<
3090.19954941876,0, 645.459991284445,
0, 3087.46040317723, 499.199553083610,
0, 0, 1
);
//cam1intrinsics = cam2intrinsics.t();
cam1distCoeffs = (cv::Mat_(5, 1) << 0.00709414207541548, -0.621034720332236, 0.00181213959853048,-0.00445584443364885,0);
//cv::Mat Rx;
R = (cv::Mat_(3, 3) << 0.998813476711113,0.0130140387339405,-0.0469283873161040,
-0.0121882898770942,0.999766574040534,0.0178393671727963,
0.0471495952276442,-0.0172462235601136,0.998738946593545);
T = (cv::Mat_(3, 1) << -73.8737526477805,2.83165895481716,2.37441573307819);
const int imageWidth = 1292; //摄像头的分辨率
const int imageHeight = 964;
Size imagesSize = Size(imageWidth, imageHeight);
cout<<"imagesSize"< 2、读取标定板图像,对图像进行校正
// TestCamera1.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include
#include
using namespace cv;
using namespace std;
int _tmain(int argc, _TCHAR* argv[])
{
char spath;
Mat Im_src;
Size boardsize(9,6);
vector> Objectpoint; // 世界坐标系
vector> Imagepoint_l; // 像素坐标系
vector> Imagepoint_r;
vector Objcorner; // 世界坐标系
vector Imgcorner; // 像素坐标系
int i,j;
// 检测角点(试验)
/* bool findresult=findChessboardCorners(Im_src, boardsize, Imgcorner, CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_NORMALIZE_IMAGE);
if(findresult)
{
cornerSubPix(Im_src, Imgcorner, Size(11, 11), Size(-1, -1),TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
drawChessboardCorners(Im_src, boardsize, Mat(Imgcorner), findresult);
//cout< filelist;
vector Imgsrc_l; // 左图象列表
char str[100];
Imgcorner.swap(vector()); // 清空原内容
for(i=1;i<15;i++) // 列表赋值
{
if(i==10)
continue;
sprintf(str,"C:\\Users\\Administrator\\Desktop\\谷歌浏览器下载\\TestCamera1\\TestCamera1\\image2\\left%02d.jpg",i);
filelist.push_back(str);
}
// 打开、检测
for(i=0;i rvecs,tvecs; // 旋转和平移
calibrateCamera(Objectpoint,Imagepoint_l,Im_src.size(),cameraMatrix_l,distCoeffs_l,rvecs,tvecs);
cout<<"cameraMatrix:"< Imgsrc_r; // 右图象列表
for(i=1;i<15;i++) // 列表赋值
{
if(i==10)
continue;
sprintf(str,"C:\\Users\\Administrator\\Desktop\\谷歌浏览器下载\\TestCamera1\\TestCamera1\\image2\\right%02d.jpg",i);
Im_src=imread(str,0);
//Mat src;
//cvtColor(Im_src,src,CV_GRAY2RGB);
Imgsrc_r.push_back(Im_src);
bool findresult=findChessboardCorners(Im_src,boardsize,Imgcorner);
cornerSubPix(Im_src, Imgcorner, Size(11, 11), Size(-1, -1),TermCriteria(CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 30, 0.1));
if(Imgcorner.size()==boardsize.area()) // 若检测到的点数吻合,添加到列表中。
{
cout<());
tvecs.swap(vector());
calibrateCamera(Objectpoint,Imagepoint_r,Im_src.size(),cameraMatrix_r,distCoeffs_r,rvecs,tvecs);
cout<<"cameraMatrix:"< 

3、使用matlab校正结果对图像直接进行校正
将matlab标定结果放在stereoParams.mat文件中
load stereoParams.mat
for i = 1:19
img1=imread(['./L',num2str(i),'.bmp']);
img2=imread(['./R',num2str(i),'.bmp']);
disp(i);
[J1,J2]=rectifyStereoImages(img1,img2,stereoParams,'OutputView','valid');
imwrite(J1,['./RL',num2str(i),'.bmp']);
imwrite(J2,['./RR',num2str(i),'.bmp']);
end
disp('Finished')
线结构光传感器标定(相机标定+结构光标定)完整流程(一)
https://blog.csdn.net/qq_27353621/article/details/120787942
UR机器人手眼标定(二)
https://blog.csdn.net/qq_27353621/article/details/121603215
双目相机标定(三)
https://blog.csdn.net/qq_27353621/article/details/121031972
双目相机下目标三维坐标计算(四)
https://blog.csdn.net/qq_27353621/article/details/121744002
公众号:机器人视觉