【图像处理OpenCV(C++版)】——5.5 图像平滑之双边滤波
前言:
欢迎来到本博客
本专栏主要结合OpenCV和C++来实现一些基本的图像处理算法并详细解释各参数含义,适用于平时学习、工作快速查询等,随时更新。
具体食用方式:可以点击本专栏【OpenCV快速查找(更新中)】–>搜索你要查询的算子名称或相关知识点,或者通过这篇博客通俗易懂OpenCV(C++版)详细教程——OpenCV函数快速查找(不断更新中)]查阅你想知道的知识,即可食用。
支持:如果觉得博主的文章还不错或者您用得到的话,可以悄悄关注一下博主哈,如果三连收藏支持就更好啦!这就是给予我最大的支持!
文章目录
-
- 学习目标
- 一、双边滤波原理
-
- 1.1 原理
- 1.2 作用
- 二、C++实现
-
- 2.1 原理实现
- 2.2 OpenCV函数
- 三、 总结
学习目标
- 了解双边滤波含义及原理
- C++实现双边滤波案例
每一张图像都可能包含某种程度的噪声,噪声可以理解为由一种或者多种原因造成的灰度值的随机变化。
在大多数情况下,通过平滑技术(也常称为滤波技术)进行抑制或者去除,其中具备保持边缘(Edge Preserving)作用的平滑技术得到了更多的关注。
常用的平滑处理算法包括基于二维离散卷积的高斯平滑、均值平滑,基于统计学方法的中值平滑,具备保持边缘作用的平滑算法的双边滤波、导向滤波等。
下面几节将详细关于具备保持边缘作用得相关方法,首先介绍双边滤波技术原理、常见应用及实现。
一、双边滤波原理
1.1 原理
均值平滑和高斯平滑本质上是计算每个位置的邻域加权和作为该位置的输出,只是这种运算可以用卷积实现,加权系数模板是通过卷积核逆时针翻转180°得到的。
双边滤波(Bilateral filter)是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折中滤波方法,根据每个位置的邻域,对该位置构建不同的权重模板,详细过程如下:
(1) 首先,构建空间距离权重模板,与构建高斯卷积核的过程类似。

其中wd表示邻域内某点q(k,l)与中心点p(i, j)的欧氏距离。σd为高斯函数的标准差。使用该公式生成的滤波器模板和高斯滤波器使用的模板是没有区别的,每个位置的空间距离权重模板是相同的。
(2) 然后,构建相似性权重模板,是通过(r,c)处的值与其邻域值的差值的指数衡量的。

其中,f(i,j) 表示图像在点(i,j)处的像素值;f(k,l) 为模板窗口中心坐标点的像素值。σr为高斯函数䣌标准差,显然每个位置的相似性权重模板是不一样的。
(3) 最后,将上述两个模板相乘,然后进行归一化,便可得到该位置的权重模板。

滤波后的图像的像素值为:
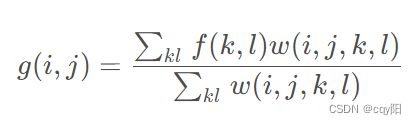
将所得到的权重模板和该位置邻域的对应位置相乘,然后求和就得到该位置的输出值,和卷积运算的第二步操作类似。
1.2 作用
中值滤波、高斯滤波、维纳滤波等滤波方法容易模糊图片的边缘细节,对高频细节的保护效果并不明显。相较而言,双边滤波器可以很好的在降噪的同时保护边缘。但是,双边滤波的卷积核是非线性的,因此计算复杂度高。
二、C++实现
2.1 原理实现
首先,通过定义函数getClosenessWeight实现空间距离权重模板,代码如下:
#include 通过定义函数bfltGray实现图像的双边滤波:
其中参数image代表图像矩阵且灰度值,范围是[0,1];
参H和W分别代表权重模板的高和宽且均为奇数;
sigma_g代表空间距离,权重模板的标准差;
sigma_d代表相似性权重模板的标准差,1效果会比较好,返回值是浮点型矩阵。
具体代码如下:
Mat bfltGray(const Mat& image, Size winSize, float sigma_g, float sigma_d){
int winH = winSize.height;
int winW = winSize.width;
//平滑窗口得高、宽为奇数
CV_Assert(winH > 0 && winW > 0);
CV_Assert(winH%2==1&& winW%2==1);
if (winH==1 && winW==1){
return image;
}
//中心点
int half_winW = (winW - 1) / 2;
int half_winH = (winH - 1) / 2;
//空间距离得权重因子
Mat closenessWeight = getClosenessWeight(sigma_g, winSize);
//图像得宽高
int rows = image.rows;
int cols = image.cols;
//双边滤波后得输出图
Mat blfImage =Mat::zeros(image.size(), CV_32FC1);
//对每个像素得领域进行核卷积
for (int r = 0; r < rows; r++){
for (int c = 0; c < cols; c++){
double pixel = image.at<double>(r, c);
//判断边界
int rTop= (r - half_winH) < 0 ? 0 : r - half_winH;
int rBottom = (r + half_winH) > rows - 1 ? rows - 1 : r + half_winH;
int cLeft = (c - half_winW) <0 ? 0 : c - half_winW;
int cRight = (c + half_winW) > cols - 1 ? cols - 1 : c + half_winW;
//核作用区域
Mat region = image(Rect(Point(cLeft, rTop),Point(cRight+1, rBottom+1))).clone();
//相似性权重模板
Mat similaritWeight;
pow(region-pixel,2.0,similaritWeight);
exp(-0.5 * similaritWeight / pow(sigma_d, 2), similaritWeight);
similaritWeight /= pow(sigma_d, 2);
//空间距离权重
Rect regionRect = Rect(Point(cLeft - c + half_winW,rTop - r + half_winH),Point(cRight - c + half_winW,rBottom - r + half_winH + 1));
Mat closenessWeightTemp = closenessWeight(regionRect).clone();
//两个权重模板点乘并归一化
Mat weightTemp =closenessWeightTemp.mul(similaritWeight);
weightTemp = weightTemp /sum(weightTemp)[0];
//权重模板与当前领域对应位置相乘,求和
Mat result = weightTemp.mul(region);
blfImage.at<double>(r, c)= sum(result)[0];
}
}
return blfImage;
}
使用bfltGray实现图像的双滤滤波,需要注意bfltGray返回的是灰度值在范围[0,1]之间的浮点型图像矩阵,如果使用函数imwrite直接保存的话,则显示为一张黑色的图片,所以要先乘以255并转换为8位图进行保存。主函数如下:
int main() {
//输入图像
Mat I = imread("D:/VSCodeFile/OpenCV_CSDN/image/logo_gray.jpeg");
if (!I.data)
{
return -1;
}
//灰度值归一化
Mat FI;
I.convertTo(FI, CV_64FC1, 1.0 / 255, 0);
//双边滤波
Mat blfI = bflfGray(FI,Size(7,7),19,0.5);
//显示原图与结果图
imshow("原图",I);
imshow("双边滤波", blfI);
//若保存为8位图,则需要乘255,并转换为CV_8U
blfI.convertTo(blfI, CV_8U, 255, 0);
imshow("blf", blfI);
waitKey(0);
return 0;
}
2.2 OpenCV函数
在OpenCV中通过定义函数bilateralFilter实现了双边滤波的功能。
cv::bilateralFilter(InputArray src,
OutputArray dst,
int d,
double sigmaColor,
double sigmaSpace,
int borderType = BORDER_DEFAULT
)
| 参数 | 解释 |
|---|---|
| src | 输入矩阵,Mat类型,8位或者浮点型单通道、三通道的图像 |
| dst | 输出矩阵,其大小与数据类型和src一致 |
| d | 表示在过滤过程中每个像素邻域的直径。如果这个值设其为非正数,那么会从第五个参数sigmaSpace来计算出它来,在使用过程中类似于模糊力度。 |
| sigmaColor | 颜色空间滤波器的sigma值。这个参数的值越大,就表明该像素邻域内有更宽广的颜色会被混合到一起,产生较大的半相等颜色区域。类似模糊范围的意思,范围越大看着越模糊 |
| sigmaSpace | 坐标空间中滤波器的sigma值,坐标空间的标注方差。数值越大,意味着越远的像素会相互影响,从而使更大的区域足够相似的颜色获取相同的颜色。当d>0,d指定了邻域大小且与sigmaSpace无关。否则,d正比于sigmaSpace。值越大,图像的过渡效果越好。 |
| borderType | 推断图像边缘像素的边界模式,默认 |
三、 总结
最后,长话短说,大家看完就好好动手实践一下,切记不能三分钟热度、三天打鱼,两天晒网。OpenCV是学习图像处理理论知识比较好的一个途径,大家也可以自己尝试写写博客,来记录大家平时学习的进度,可以和网上众多学者一起交流、探讨,有什么问题希望大家可以积极评论交流,我也会及时更新,来督促自己学习进度。希望大家觉得不错的可以点赞、关注、收藏。
