Unity 基于法线和深度实现完美描边,可独立控制物体描边
目录
- 前言
- 自定义PostProcess
- OutlineShader关键代码说明
-
- 1 使用深度绘制描边
-
- 1.1 获得斜四方形UV坐标:
- 1.2 采样四方向深度
- 2 使用法线绘制描边
- 3 解决倾斜表面白块问题
-
- 3.1 计算视方向
- 3.2 使用视方向修正阈值
- 4 单独控制物体是否显示描边
- OutlineShader完整代码
前言
最近项目需要快速出一版卡通渲染风格进行吸量测试。但是原来的模型非常不适合使用back face 的描边方案(很难看),不得已寻求其他的描边方案,于是有了现在这篇基于法线和深度的后处理描边。
优点:
- 描边宽度一致。
- 重叠部分也能有描边。
- 不会出现断裂
缺点: - 后处理时有一定消耗(全屏采样8次)
本文是基于buildin 渲染管线,非URP。(老项目,没办法)
本文会使用自定义post-processing,目的是可以和其他的post-processing效果结合,方便使用。
不熟悉post-processing 的同学可以看下面这个文章:
PostProcessing的使用
自定义PostProcess
using System;
using UnityEngine;
using UnityEngine.Rendering.PostProcessing;
[Serializable]
[PostProcess(typeof(PostProcessOutlineRenderer), PostProcessEvent.BeforeStack, "Post Process Outline")]
public sealed class PostProcessOutline : PostProcessEffectSettings
{
//声明变量
public IntParameter scale = new IntParameter { value = 1 };
public FloatParameter depthThreshold = new FloatParameter { value = 1 };
[Range(0, 1)]
public FloatParameter normalThreshold = new FloatParameter { value = 0.4f };
[Range(0, 1)]
public FloatParameter depthNormalThreshold = new FloatParameter { value = 0.5f };
public FloatParameter depthNormalThresholdScale = new FloatParameter { value = 7 };
public ColorParameter color = new ColorParameter { value = Color.white };
}
public sealed class PostProcessOutlineRenderer : PostProcessEffectRenderer<PostProcessOutline>
{
public override void Render(PostProcessRenderContext context)
{
//将面板变量对Outline shader赋值
var sheet = context.propertySheets.Get(Shader.Find("Hidden/Outline Post Process"));
sheet.properties.SetFloat("_Scale", settings.scale);
sheet.properties.SetFloat("_DepthThreshold", settings.depthThreshold);
sheet.properties.SetFloat("_NormalThreshold", settings.normalThreshold);
Matrix4x4 clipToView = GL.GetGPUProjectionMatrix(context.camera.projectionMatrix, true).inverse;
sheet.properties.SetMatrix("_ClipToView", clipToView);
sheet.properties.SetFloat("_DepthNormalThreshold", settings.depthNormalThreshold);
sheet.properties.SetFloat("_DepthNormalThresholdScale", settings.depthNormalThresholdScale);
sheet.properties.SetColor("_Color", settings.color);
context.command.BlitFullscreenTriangle(context.source, context.destination, sheet, 0);
}
}
添加这个脚本后,我们就可以在PostProcess面板上进行输入参数控制

使用properties.SetXXX 将数据传入后处理Shader中
sheet.properties.SetFloat("_Scale", settings.scale);
后面Shader所使用的外部数据基本都由这里输入。
完整的Shader代码会放在最后。
OutlineShader关键代码说明
1 使用深度绘制描边
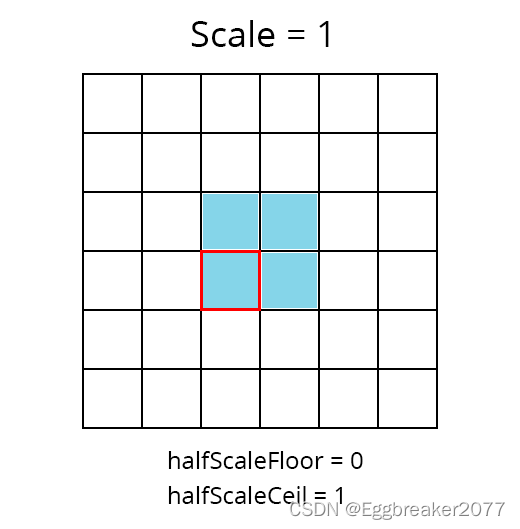
1.1 获得斜四方形UV坐标:
float halfScaleFloor = floor(_Scale * 0.5);
float halfScaleCeil = ceil(_Scale * 0.5);
float2 bottomLeftUV = i.texcoord - float2(_MainTex_TexelSize.x, _MainTex_TexelSize.y) * halfScaleFloor;
float2 topRightUV = i.texcoord + float2(_MainTex_TexelSize.x, _MainTex_TexelSize.y) * halfScaleCeil;
float2 bottomRightUV = i.texcoord + float2(_MainTex_TexelSize.x * halfScaleCeil, -_MainTex_TexelSize.y * halfScaleFloor);
float2 topLeftUV = i.texcoord + float2(-_MainTex_TexelSize.x * halfScaleFloor, _MainTex_TexelSize.y * halfScaleCeil);
i.texcoord 是屏幕UV
_Scale 是我们用来调整描边粗细的参数。通过floor 和ceil, 使得halfScaleFloor 和 halfScaleCeil 在调整_Scale时,以整数改变。通过这种方式,我们就可以让边缘检测像素以原UV位置向4个斜方向每次增加1像素。(因为深度和法线图是用point filtering采样的,不存在插值,所以我们使用整数增加)

1.2 采样四方向深度
float depth0 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, bottomLeftUV).r;
float depth1 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, topRightUV).r;
float depth2 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, bottomRightUV).r;
float depth3 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, topLeftUV).r;
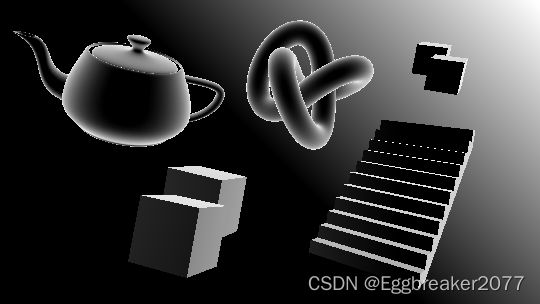
如果我们查看depth0的结果,可以看到下图
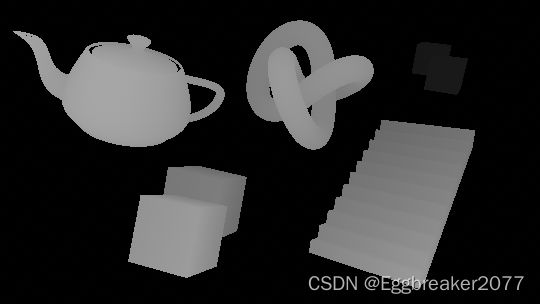
离摄像机越近,颜色越亮,越远则越暗。
这时我们就可以用两两深度图相减,这样两图深度相近的地方颜色值就非常小。深度差别大的地方则相反。
float depthFiniteDifference0 = depth1 - depth0;
float depthFiniteDifference1 = depth3 - depth2;
return abs(depthFiniteDifference0) * 100;//为了方便查看结果扩大100倍
得到下图:

现在将两张深度图的平方相加再开方(The Roberts Cross 边缘检测方法)
float edgeDepth = sqrt(pow(depthFiniteDifference0, 2) + pow(depthFiniteDifference1, 2)) * 100;
return edgeDepth;
获得下图:

这个时候,一些外围边缘已经清晰可见。但是我们还是能在物体表面看到一些灰色区域。所以我们需要把较低的深度值过滤掉。
使用阈值_DepthThreshold
edgeDepth = edgeDepth > _DepthThreshold ? 1 : 0;
return edgeDepth;
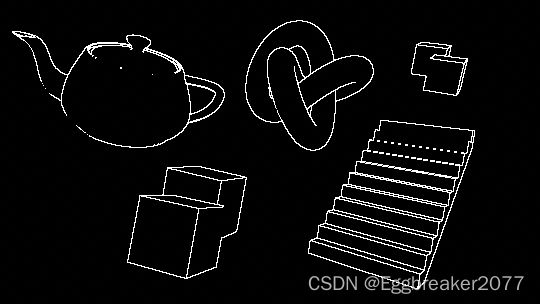
在_DepthThreshold 值设定为0.2时,得到下图

这样,我们就解决了灰色区域。但是我们也注意到前方有一个Cube的顶部全部填充的白色,后方的两个Cube重叠区域没有描边,梯子和前方方块有些边缘没有绘制。
我们先解决后方Cube的问题。
因为深度值是非线性的,越到后面深度相差就越小。那么我们就要根据深度值改变阈值大小。
float depthThreshold = _DepthThreshold * depth0;
edgeDepth = edgeDepth > depthThreshold ? 1 : 0;
再将_DepthThreshold 改到1.5 我们可以看到

这样,后面重叠的Cube也能看到边缘了。
接下来我们要解决一些边缘缺失的问题。
2 使用法线绘制描边
为了获得所有物体法线数据,我们需要一个摄像机,来绘制法线图。然后将法线图保存到一个Shader全局变量中:_CameraNormalsTexture
为主摄像机添加脚本:
using UnityEngine;
public class RenderReplacementShaderToTexture : MonoBehaviour
{
[SerializeField]
Shader replacementShader;
[SerializeField]
RenderTextureFormat renderTextureFormat = RenderTextureFormat.ARGB32;
[SerializeField]
FilterMode filterMode = FilterMode.Point;
[SerializeField]
int renderTextureDepth = 24;
[SerializeField]
CameraClearFlags cameraClearFlags = CameraClearFlags.Color;
[SerializeField]
Color background = Color.black;
[SerializeField]
string targetTexture = "_RenderTexture";
private RenderTexture renderTexture;
private new Camera camera;
private void Start()
{
foreach (Transform t in transform)
{
DestroyImmediate(t.gameObject);
}
Camera thisCamera = GetComponent<Camera>();
// Create a render texture matching the main camera's current dimensions.
renderTexture = new RenderTexture(thisCamera.pixelWidth, thisCamera.pixelHeight, renderTextureDepth, renderTextureFormat);
renderTexture.filterMode = filterMode;
// Surface the render texture as a global variable, available to all shaders.
Shader.SetGlobalTexture(targetTexture, renderTexture);
// Setup a copy of the camera to render the scene using the normals shader.
GameObject copy = new GameObject("Camera" + targetTexture);
camera = copy.AddComponent<Camera>();
camera.CopyFrom(thisCamera);
camera.transform.SetParent(transform);
camera.targetTexture = renderTexture;
camera.SetReplacementShader(replacementShader, "RenderType");
camera.depth = thisCamera.depth - 1;
camera.clearFlags = cameraClearFlags;
camera.backgroundColor = background;
}
}
通过SetReplacementShader,将场景中物体替换为绘制法线的Shader。得到法线图。
绘制法线Shader:
Shader "Hidden/Normals Texture"
{
Properties
{
}
SubShader
{
Tags
{
"RenderType" = "Opaque"
}
Pass
{
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
struct appdata
{
float4 vertex : POSITION;
float3 normal : NORMAL;
};
struct v2f
{
float4 vertex : SV_POSITION;
float3 viewNormal : NORMAL;
};
sampler2D _MainTex;
float4 _MainTex_ST;
v2f vert (appdata v)
{
v2f o;
o.vertex = UnityObjectToClipPos(v.vertex);
o.viewNormal = COMPUTE_VIEW_NORMAL;
//o.viewNormal = mul((float3x3)UNITY_MATRIX_M, v.normal);
return o;
}
float4 frag (v2f i) : SV_Target
{
return float4(normalize(i.viewNormal) * 0.5 + 0.5, 0);
}
ENDCG
}
}
}
点击Play按钮,我们能在生成的法线摄像机中看到下图:

这时,我们就可以在Outline Shader中使用法线数据了。
同样,我们进行斜四方向采样。
float3 normal0 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, bottomLeftUV).rgb;
float3 normal1 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, topRightUV).rgb;
float3 normal2 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, bottomRightUV).rgb;
float3 normal3 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, topLeftUV).rgb;
然后继续使用The Roberts Cross 方法计算边缘:
float3 normalFiniteDifference0 = normal1 - normal0;
float3 normalFiniteDifference1 = normal3 - normal2;
float edgeNormal = sqrt(dot(normalFiniteDifference0, normalFiniteDifference0) + dot(normalFiniteDifference1, normalFiniteDifference1));
edgeNormal = edgeNormal > _NormalThreshold ? 1 : 0;
return edgeNormal;
由于 normalFiniteDifference0 是个float3 向量,所以使用点乘Dot来代替平方。得到下图:
可以看到,通过法线比较获得的边缘,不会有一块白的区域。
并且我们得到了一些深度检测没有获得的边缘。
现将两个结果合并:
float edge = max(edgeDepth, edgeNormal);
return edge;
得到下图:

3 解决倾斜表面白块问题
因为深度检测的原因,倾斜表面像素间会有很大的深度差。所以容易产生白块。为了解决这个问题,我们还需要知道摄像机到表面的方向(view direction 视方向)
3.1 计算视方向
由于我们采样的法线图是在视空间(view space),那么我们也需要在视空间的视方向。为了得到它,我们需要摄像机的 裁减到视空间(clip to view) 或者 逆投影(inverse projection) 矩阵。
但是这个矩阵在默认的屏幕shader中是不能获得的,所以我们通过C#将矩阵传递进来。
在custom postprocess中的代码:
Matrix4x4 clipToView = GL.GetGPUProjectionMatrix(context.camera.projectionMatrix, true).inverse;
sheet.properties.SetMatrix("_ClipToView", clipToView);
于是,我们就可以在vert着色器中计算视空间中的视方向了。
o.vertex = float4(v.vertex.xy, 0.0, 1.0);
o.viewSpaceDir = mul(_ClipToView, o.vertex).xyz;
3.2 使用视方向修正阈值
得到视方向后,我们就可以得到NdotV(也成为菲列尔),表示法线和视方向的重合度。
//法线在0...1范围, 视方向在 -1...1范围,需要统一范围
float3 viewNormal = normal0 * 2 - 1;
float NdotV = 1 - dot(viewNormal, -i.viewSpaceDir);
return NdotV;
得到下图:
我们引入阈值_DepthNormalThreshold 来控制NdotV的影响范围
同时引入_DepthNormalThresholdScale控制调节范围在0 - 1之间
float normalThreshold01 = saturate((NdotV - _DepthNormalThreshold) / (1 - _DepthNormalThreshold));
float normalThreshold = normalThreshold01 * _DepthNormalThresholdScale + 1;
然后将新的法线阈值和深度阈值结合:
float depthThreshold = _DepthThreshold * depth0 * normalThreshold;
得到一个较完美的描边
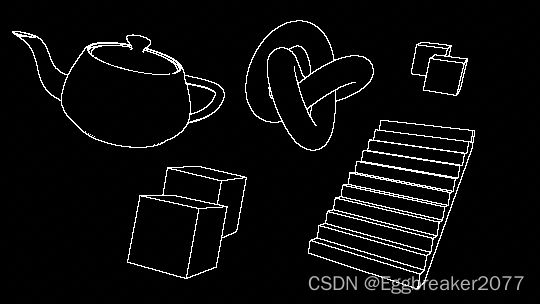
最后合并图像原有颜色:
float4 color = SAMPLE_TEXTURE2D(_MainTex, sampler_MainTex, i.texcoord);
float4 edgeColor = float4(_Color.rgb, _Color.a * edge);
return alphaBlend(edgeColor, color);

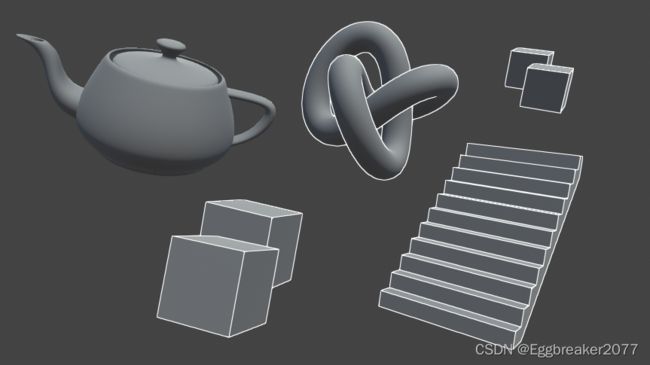
得到最终效果图。
4 单独控制物体是否显示描边
因为是后处理,通常情况下,看到的物体都会被描边。但是我们有时候又需要排除一些不需要描边的物体。这时我们可以通过控制材质球的shaderPassEnable来实现。
public class ShaderPassController : MonoBehaviour
{
public bool value;
public string passName = "Always";
// Start is called before the first frame update
void Start()
{
var mat = GetComponent<Renderer>().material;
mat.SetShaderPassEnabled(passName, value);
}
}
用于绘制法线的Shader 没有声明Tag。此时,Unity会默认设置Tag{“LightModel”=“Always”}
此时,我们可以通过SetShaderPassEnabled 关闭Shader中Tag为"Always"的Pass. 关闭后,此物体的Shader对于法线摄像机等于没有任何Pass,所以不会被绘制。当我们给茶壶添加ShaderPassController脚本后,法线摄像机如下图:

如果物体原本的shader使用的是“Always”Tag,为了防止被关闭Pass,可以添加tags {“LightModel”=“ForwardBase”} 来规避
此时,我们只需判断没有法线数据的点就是没有描边就可以了。
if (normal3.r == 1 && normal3.g == 1 && normal3.b == 1
&& normal0.r == 1 && normal0.g == 1 && normal0.b == 1
&& normal1.r == 1 && normal1.g == 1 && normal1.b == 1
&& normal2.r == 1 && normal2.g == 1 && normal2.b == 1)
{
edge = 0;
}
得到下图:
OutlineShader完整代码
Shader "Hidden/Outline Post Process"
{
SubShader
{
Cull Off ZWrite Off ZTest Always
Pass
{
// Custom post processing effects are written in HLSL blocks,
// with lots of macros to aid with platform differences.
// https://github.com/Unity-Technologies/PostProcessing/wiki/Writing-Custom-Effects#shader
HLSLPROGRAM
#pragma vertex Vert
#pragma fragment Frag
#include "Packages/com.unity.postprocessing/PostProcessing/Shaders/StdLib.hlsl"
TEXTURE2D_SAMPLER2D(_MainTex, sampler_MainTex);
// _CameraNormalsTexture contains the view space normals transformed
// to be in the 0...1 range.
TEXTURE2D_SAMPLER2D(_CameraNormalsTexture, sampler_CameraNormalsTexture);
TEXTURE2D_SAMPLER2D(_CameraDepthTexture, sampler_CameraDepthTexture);
// Data pertaining to _MainTex's dimensions.
// https://docs.unity3d.com/Manual/SL-PropertiesInPrograms.html
float4 _MainTex_TexelSize;
float _Scale;
float _DepthThreshold;
float _NormalThreshold;
float4x4 _ClipToView;
float _DepthNormalThreshold;
float _DepthNormalThresholdScale;
float4 _Color;
// Combines the top and bottom colors using normal blending.
// https://en.wikipedia.org/wiki/Blend_modes#Normal_blend_mode
// This performs the same operation as Blend SrcAlpha OneMinusSrcAlpha.
float4 alphaBlend(float4 top, float4 bottom)
{
float3 color = (top.rgb * top.a) + (bottom.rgb * (1 - top.a));
float alpha = top.a + bottom.a * (1 - top.a);
return float4(color, alpha);
}
struct Varyings
{
float4 vertex : SV_POSITION;
float2 texcoord : TEXCOORD0;
float2 texcoordStereo : TEXCOORD1;
float3 viewSpaceDir : TEXCOORD2;
#if STEREO_INSTANCING_ENABLED
uint stereoTargetEyeIndex : SV_RenderTargetArrayIndex;
#endif
};
Varyings Vert(AttributesDefault v)
{
Varyings o;
o.vertex = float4(v.vertex.xy, 0.0, 1.0);
o.viewSpaceDir = mul(_ClipToView, o.vertex).xyz;
o.texcoord = TransformTriangleVertexToUV(v.vertex.xy);
#if UNITY_UV_STARTS_AT_TOP
o.texcoord = o.texcoord * float2(1.0, -1.0) + float2(0.0, 1.0);
#endif
o.texcoordStereo = TransformStereoScreenSpaceTex(o.texcoord, 1.0);
return o;
}
float4 Frag(Varyings i) : SV_Target
{
float halfScaleFloor = floor(_Scale * 0.5);
float halfScaleCeil = ceil(_Scale * 0.5);
float2 bottomLeftUV = i.texcoord - float2(_MainTex_TexelSize.x, _MainTex_TexelSize.y) * halfScaleFloor;
float2 topRightUV = i.texcoord + float2(_MainTex_TexelSize.x, _MainTex_TexelSize.y) * halfScaleCeil;
float2 bottomRightUV = i.texcoord + float2(_MainTex_TexelSize.x * halfScaleCeil, -_MainTex_TexelSize.y * halfScaleFloor);
float2 topLeftUV = i.texcoord + float2(-_MainTex_TexelSize.x * halfScaleFloor, _MainTex_TexelSize.y * halfScaleCeil);
float depth0 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, bottomLeftUV).r;
float depth1 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, topRightUV).r;
float depth2 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, bottomRightUV).r;
float depth3 = SAMPLE_DEPTH_TEXTURE(_CameraDepthTexture, sampler_CameraDepthTexture, topLeftUV).r;
float3 normal0 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, bottomLeftUV).rgb;
float3 normal1 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, topRightUV).rgb;
float3 normal2 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, bottomRightUV).rgb;
float3 normal3 = SAMPLE_TEXTURE2D(_CameraNormalsTexture, sampler_CameraNormalsTexture, topLeftUV).rgb;
float3 normalFiniteDifference0 = normal1 - normal0;
float3 normalFiniteDifference1 = normal3 - normal2;
float edgeNormal = sqrt(dot(normalFiniteDifference0, normalFiniteDifference0) + dot(normalFiniteDifference1, normalFiniteDifference1));
edgeNormal = edgeNormal > _NormalThreshold ? 1 : 0;
float depthFiniteDifference0 = depth1 - depth0;
float depthFiniteDifference1 = depth3 - depth2;
float edgeDepth = sqrt(pow(depthFiniteDifference0, 2) + pow(depthFiniteDifference1, 2)) * 100;
float3 viewNormal = normal0 * 2 - 1;
float NdotV = 1 - dot(viewNormal, -i.viewSpaceDir);
float normalThreshold01 = saturate((NdotV - _DepthNormalThreshold) / (1 - _DepthNormalThreshold));
float normalThreshold = normalThreshold01 * _DepthNormalThresholdScale + 1;
float depthThreshold = _DepthThreshold * depth0 * normalThreshold;
edgeDepth = edgeDepth > depthThreshold ? 1 : 0;
float edge = max(edgeDepth, edgeNormal);
if (normal3.r == 1 && normal3.g == 1 && normal3.b == 1
&& normal0.r == 1 && normal0.g == 1 && normal0.b == 1
&& normal1.r == 1 && normal1.g == 1 && normal1.b == 1
&& normal2.r == 1 && normal2.g == 1 && normal2.b == 1)
{
edge = 0;
}
float4 color = SAMPLE_TEXTURE2D(_MainTex, sampler_MainTex, i.texcoord);
float4 edgeColor = float4(_Color.rgb, _Color.a * edge);
return alphaBlend(edgeColor, color);
}
ENDHLSL
}
}
}