UART串口通信协议
一、串行通信
串行通信分为两种方式:同步串行通信和异步串行通信。
同步串行通信需要通信双方在同一时钟的控制下,同步传输数据。
异步串行通信是指通信双方使用各自的时钟控制数据的发送和接收过程。
二、UART
UART串口通信需要两根信号线来实现,一根用于串口发送,另外一根负责串口接收。
UART在发送或接收过程中的一帧数据由4部分组成,起始位(低电平)、数据位、奇偶校验位和停止位(高电平)。
起始位标志着一帧数据的开始,停止位标志着一帧数据的结束,数据位是一帧数据中的有效数据。
校验位分为奇校验和偶校验,用于检验数据在传输过程中是否出错。奇校验时,发送方应使数据位中1的个数与校验位中1的个数之和为奇数;接收方在接收数据时,对1的个数进行检查,若不为奇数,则说明数据在传输过程中出了差错。同样,偶校验则检查1的个数是否为偶数。

UART通信过程中的数据格式及传输速率是可设置的,数据位可选择为 5、6、7、8位(最常用);校验位可选择奇校验、偶校验或者无校验位;停止位可选择1位(默认),1.5或2位。
串口通信的速率用波特率表示,它表示每秒传输二进制数据的位数,单位是bps(位/秒),常用的波特率有9600、19200、38400、57600以及115200等。
FPGA开发串口中,为了得到串口传输一位数据所需要的系统时钟周期数,需要对系统时钟进行计数,计数方法为FPGA时钟频率/波特率。如时钟频率为50000000hz(50MHz),需要的比特率为9600bps,则需要计数50000000/9600≈5208次
三、串口实现
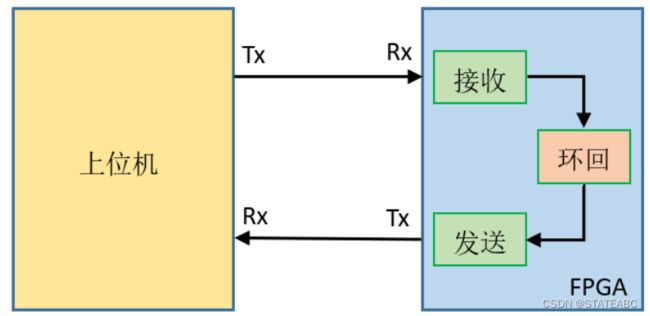
上位机通过串口调试助手发送数据给FPGA,FPGA 通过USB串口接收数据并将接收到的数据发送给上位机,完成串口数据环回。
首先要有一个接收模块,接收串口调试助手发送的数据
module uart_rx(
//**************输入**************
input clk, //系统50MHz时钟
input rst_n, //系统复位,低电平有效
input uart_rxd, //UART接收端口
//**************输出**************
output reg uart_done, //接收一帧数据完成标志
output reg rx_flag, //接收标志位
output reg [3:0] rx_cnt, //接收数据计数器
output reg [7:0] rxdata, //接收端口数据寄存
output reg [7:0] uart_data //接收的数据
);
//************参数定义************
parameter CLK_FREQ = 50000000; //系统时钟
parameter UART_BPS = 9600; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //波特率计数,串口传输一位所需要的系统时钟周期数
//************信号定义************
reg uart_rxd_1; //异步信号会带来亚稳态,常用处理方式是打拍处理,第一拍
reg uart_rxd_2; //第二拍,通常打两拍就基本上就能避免亚稳态问题
reg [15:0] clk_cnt; //系统时钟计数器
wire start_flag; //起始标志位
//检测接收端口下降沿来捕获起始位,输出一个时钟周期的脉冲start fag,并进入串口接收过程
assign start_flag = uart_rxd_2 & (~uart_rxd_1);
//对UART接收端口的数据延迟两个时钟周期避免亚稳态
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
uart_rxd_1 <= 1'b0;
uart_rxd_2 <= 1'b0;
end
else begin
uart_rxd_1 <= uart_rxd;
uart_rxd_2 <= uart_rxd_1;
end
end
//当脉冲信号start_flag有效,进入数据接收过程
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
rx_flag <= 1'b0;
else begin
//检测到起始位,进入数据接收过程,标志位rx_flag拉高
if(start_flag)
rx_flag <= 1'b1;
//当接收数据计数器计数到9(9个波特周期)且在停止位中间(数据寄存已经完成,为检测下一帧数据起始位准备),停止接收,标志位rx_flag拉低
else if((rx_cnt == 4'd9) && (clk_cnt == BPS_CNT/2))
rx_flag <= 1'b0;
else
rx_flag <= rx_flag;
end
end
//进入数据接收过程启动系统时钟计数器
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
clk_cnt <= 16'd0;
//标志位rx_flag有效,处于接收过程
else if (rx_flag) begin
//计数没到一个波特率周期则一直计数,到了则清零
if (clk_cnt < BPS_CNT - 1)
clk_cnt <= clk_cnt + 1'b1;
else
clk_cnt <= 16'd0;
end
//数据接收过程结束,计数器清零
else
clk_cnt <= 16'd0;
end
//进入数据接收过程启动接收数据计数器
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
rx_cnt <= 4'd0;
else if (rx_flag) begin
//系统时钟计数到一个波特率周期,接收数据计数器加1,没到则不加
if (clk_cnt == BPS_CNT - 1)
rx_cnt <= rx_cnt + 1'b1; //可以用来判断当前传输的是第几位
else
rx_cnt <= rx_cnt;
end
//接收过程结束,计数器清零
else
rx_cnt <= 4'd0;
end
//根据接收数据计数器来寄存uart接收端口数据
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
rxdata <= 8'd0;
else if(rx_flag)
//计数到数据中间的采样结果最稳定
if (clk_cnt == BPS_CNT/2) begin
case (rx_cnt)
//根据rx_cnt的值将uart接收端口的数据寄存到接收数据寄存器对应的位实现串并转换
4'd1 : rxdata[0] <= uart_rxd_2; //寄存数据位最低位
4'd2 : rxdata[1] <= uart_rxd_2;
4'd3 : rxdata[2] <= uart_rxd_2;
4'd4 : rxdata[3] <= uart_rxd_2;
4'd5 : rxdata[4] <= uart_rxd_2;
4'd6 : rxdata[5] <= uart_rxd_2;
4'd7 : rxdata[6] <= uart_rxd_2;
4'd8 : rxdata[7] <= uart_rxd_2; //寄存数据位最高位
default:;
endcase
end
else
rxdata <= rxdata;
else
rxdata <= 8'd0;
end
//数据接收完毕后给出标志信号并寄存输出接收到的数据
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
//接收数据计数器计数到停止位时,寄存输出接收到的数据并将接收完成标志位拉高
else if(rx_cnt == 4'd9) begin
uart_data <= rxdata;
uart_done <= 1'b1;
end
else begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
end
endmodule 然后还需要一个发送模块,将数据发送给PC端,原理同接收模块大部分一致
module uart_tx(
//**************输入**************
input clk, //系统50MHz时钟
input rst_n, //系统复位,低电平有效
input uart_en, //发送使能信号
input [ 7:0] uart_din, //待发送数据
//**************输出**************
output uart_tx_busy, //发送忙状态标志
output en_flag, //使能标志位
output reg tx_flag, //发送过程标志信号
output reg [ 7:0] tx_data, //寄存发送数据
output reg [ 3:0] tx_cnt, //发送数据计数器
output reg uart_txd //UART发送端口
);
//************参数定义************
parameter CLK_FREQ = 50000000; //系统时钟频率
parameter UART_BPS = 9600; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //波特率计数,串口传输一位所需要的系统时钟周期数
//************信号定义************
reg uart_en_1;
reg uart_en_2;
reg [15:0] clk_cnt; //系统时钟计数器
//在串口发送过程中给出忙状态标志,其他模块就可以判断串口发送模块是否处于空闲状态
assign uart_tx_busy = tx_flag;
//捕获uart_en上升沿,得到一个时钟周期的脉冲信号,进入数据发送过程
assign en_flag = (~uart_en_2) & uart_en_1;
//对发送使能信号uart_en延迟两个时钟周期避免亚稳态
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
uart_en_1 <= 1'b0;
uart_en_2 <= 1'b0;
end
else begin
uart_en_1 <= uart_en;
uart_en_2 <= uart_en_1;
end
end
//当脉冲信号en_flag到达时,寄存待发送的数据,进入发送过程
always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
tx_flag <= 1'b0;
tx_data <= 8'd0;
end
//检测到发送使能上升沿,进入发送过程,标志位tx_flag拉高,寄存待发送数据
else if (en_flag) begin
tx_flag <= 1'b1;
tx_data <= uart_din;
end
//计数到停止位结束时,停止发送过程,标志位tx_flag拉低
else if ((tx_cnt == 4'd9) && (clk_cnt == BPS_CNT - (BPS_CNT/16))) begin //提前1/16个停止位拉低,保证发送数据时间略小于接收数据时间,避免数据积累造成丢失
tx_flag <= 1'b0;
tx_data <= 8'd0;
end
else begin
tx_flag <= tx_flag;
tx_data <= tx_data;
end
end
//进入发送过程后,启动系统时钟计数器
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
clk_cnt <= 16'd0;
else if (tx_flag) begin
if (clk_cnt < BPS_CNT - 1)
clk_cnt <= clk_cnt + 1'b1;
else
clk_cnt <= 16'd0;
end
else
clk_cnt <= 16'd0;
end
//进入发送过程后,启动发送数据计数器
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
tx_cnt <= 4'd0;
else if (tx_flag) begin
if (clk_cnt == BPS_CNT - 1)
tx_cnt <= tx_cnt + 1'b1;
else
tx_cnt <= tx_cnt;
end
else
tx_cnt <= 4'd0;
end
//根据发送数据计数器来给uart发送端口赋值
always @(posedge clk or negedge rst_n) begin
if (!rst_n)
uart_txd <= 1'b1;
else if (tx_flag)
case(tx_cnt)
4'd0: uart_txd <= 1'b0; //起始位
4'd1: uart_txd <= tx_data[0]; //数据位最低位
4'd2: uart_txd <= tx_data[1];
4'd3: uart_txd <= tx_data[2];
4'd4: uart_txd <= tx_data[3];
4'd5: uart_txd <= tx_data[4];
4'd6: uart_txd <= tx_data[5];
4'd7: uart_txd <= tx_data[6];
4'd8: uart_txd <= tx_data[7]; //数据位最高位
4'd9: uart_txd <= 1'b1; //停止位
default: ;
endcase
else
uart_txd <= 1'b1; //空闲时发送端口为高电平
end
endmodule 环回模块将串口接收模块接收到的数据发送给串口发送模块
module uart_loop(
//**************输入**************
input clk, //系统时钟
input rst_n, //系统复位,低电平有效
input recv_done, //接收一帧数据完成标志
input [7:0] recv_data, //接收的数据
input tx_busy, //发送忙状态标志
//**************输出**************
output reg send_en, //发送使能信号
output reg [7:0] send_data //待发送数据
);
//************信号定义************
reg recv_done_d0;
reg recv_done_d1;
reg tx_ready;
//wire define
wire recv_done_flag;
//检测到recv_done上升沿,得到一个时钟周期的脉冲信号,标志着串口接收模块接收到了一帧数据
assign recv_done_flag = (~recv_done_d1) & recv_done_d0;
//对发送使能信号recv_done延迟两个时钟周期
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
recv_done_d0 <= 1'b0;
recv_done_d1 <= 1'b0;
end
else begin
recv_done_d0 <= recv_done;
recv_done_d1 <= recv_done_d0;
end
end
//判断接收完成信号,并在串口发送模块空闲时给出发送使能信号
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
tx_ready <= 1'b0;
send_en <= 1'b0;
send_data <= 8'd0;
end
else begin
if(recv_done_flag)begin
tx_ready <= 1'b1 //将tx_ready信号拉高,表示已经准备好了待发送的数据
send_en <= 1'b0; //将send_en信号拉低,为接下来产生一个上升沿作准备
send_data <= recv_data; //寄存接收到的数据recv_data到send_data中
end
else if(tx_ready && (~tx_busy)) begin //检测串口发送模块处于空闲状态
tx_ready <= 1'b0; //准备过程结束,等待下一个串口接收数据的到来
send_en <= 1'b1; //拉高发送使能信号以启动串口发送模块的发送过程将寄存到send_data中的数据发送出去
end
end
end
endmodule 顶层文件
module uart(
//**************输入**************
input clk, //外部50M时钟
input rst_n, //外部复位信号,低有效
input uart_rxd, //UART接收端口
//**************输出**************
output uart_txd //UART发送端口
);
//************参数定义************
parameter CLK_FREQ = 50000000; //定义系统时钟频率
parameter UART_BPS = 115200; //定义串口波特率
//************信号定义************
wire uart_recv_done; //UART接收完成
wire [7:0] uart_recv_data; //UART接收数据
wire uart_send_en; //UART发送使能
wire [7:0] uart_send_data; //UART发送数据
wire uart_tx_busy; //UART发送忙状态标志
//串口接收模块
uart_rx #(
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口接收波特率
u_uart_recv(
.clk (clk),
.rst_n (rst_n),
.uart_rxd (uart_rxd),
.uart_done (uart_recv_done),
.uart_data (uart_recv_data)
);
//串口发送模块
uart_tx #(
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口发送波特率
u_uart_send(
.clk (clk),
.rst_n (rst_n),
.uart_en (uart_send_en),
.uart_din (uart_send_data),
.uart_tx_busy (uart_tx_busy),
.uart_txd (uart_txd)
);
//串口环回模块
uart_loop u_uart_loop(
.clk (clk),
.rst_n (rst_n),
.recv_done (uart_recv_done), //接收一帧数据完成标志信号
.recv_data (uart_recv_data), //接收的数据
.tx_busy (uart_tx_busy), //发送忙状态标志
.send_en (uart_send_en), //发送使能信号
.send_data (uart_send_data) //待发送数据
);
endmodule
参考资料:
正点原子FPGA教程、小梅哥FPGA教程