深度优先搜索(BFS)与广度优先搜索(DFS)
文章目录
- 前言
- 一、深度优先搜索
-
- 1.定义
- 2.关键
- 3.文字理解
- 4.图片理解
- 5.例题1
- 6.例题1代码
- 7.例题2
- 8.例题2理解
- 9.例题2代码
- 二、广度优先搜索
-
- 1.定义
- 2.关键
- 3.文字理解
- 4.例题
- 5.例题代码
- 总结
前言
本次撰写的内容是深度优先搜索与广度优先搜索
这两三天将会对前几天学习的东西进行一个总结,之后开始写学生管理系统,如果有空闲时间将会继续写周报。
一、深度优先搜索
1.定义
DFS(Depth-First Search):深度优先搜索属于图算法的一种,其过程简要来说是对每一个可能的分支路径深入到不能再深入为止,而且每个节点只能访问一次。
2.关键
深度优先搜索其实是围绕着一词“回溯”展开,我们若是理解了回溯,那么对理解深度优先有十分大的帮助。
因为DFS是一种关于图的算法,所以我们从图的角度展开理解,回溯对于图来说,就相当于对已经走过的路进行新的尝试。
3.文字理解
首先因为DFS是一种关于图的算法,所以笔者在此用文字对其进行简单的描述,后文会通过图片来进一步理解。
深度优先搜索的步骤分为 1.递归下去 2.回溯上来。顾名思义,深度优先,则是以深度为准则,先一条路走到底,直到达到目标。这里称之为递归下去。
否则既没有达到目标又无路可走了,那么则退回到上一步的状态,走其他路。这便是回溯上来
4.图片理解
在此笔者贴出几张丑陋的图片供读者理解。以下是迷宫中一个人运用DFS走到终点的路径:
1.首先向右走

2.其次打叉的地方是障碍物,我们走不通,呢么根据方向顺序我们需要尝试向下走,走通了,那么我们可以向下走

3.然后我们继续尝试向右
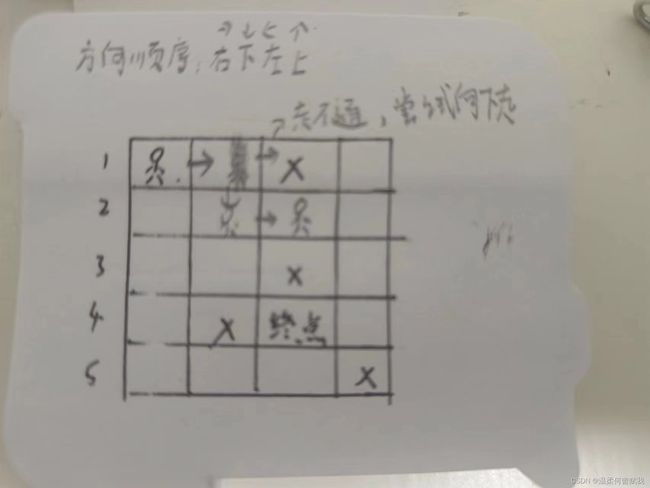
4.最后我们一次类推走到终点

但是我们显然还要尝试别的走法,那么我们就需要退回去继续尝试,那么这里就要用到我们回溯的思想了
例如我们回溯到下面这步,我们在没回溯此步之前是向下走的,那么我们按照顺序就需要依次尝试向左与向上了,左边是障碍物,上面是我们已经走过的路,那么四个方向都不能走时,我们就需要继续回溯。
在这里有些小伙伴可能会问了,怎么知道我们已经走过哪些路了呢,那么就需要我们额外设立一个数组进行记录,如果下一步要走的路已经在我们记录的路中,那么我们就不会走这一步,同时,当我们回溯到上一步时,也会将数组中此步的坐标删除。

5.例题1
我们常常使用深度优先搜索解决迷宫问题,那么我们就以我上面的图为迷宫的原型,问小人走到终点所需的最短步数。
6.例题1代码
在此代码笔者运用了递归的方法,其实用栈也可以实现,因为栈的本质其实就是递归。学习c++后笔者将会考虑补上栈法的代码
# include 输入:
5 4 (迷宫行列)
(迷宫地图,1代表障碍物,0代表可以走)
0 0 1 0
0 0 0 0
0 0 1 0
0 1 0 0
0 0 0 1
1 1 4 3(分别为起点与终点坐标)
输出:
7
7.例题2
我们以此道例题为例,不过我们将3个盒子变为9个盒子
8.例题2理解
我们将手中空闲的牌按顺序放入盒子中,当放完后便走回上一个盒子取回原来的牌,然后继续按照顺序放入,手中牌放完后就输出盒子中牌的序列
9.例题2代码
# include 二、广度优先搜索
1.定义
广度优先搜索较之深度优先搜索之不同在于,深度优先搜索旨在不管有多少条岔路,先一条路走到底,不成功就返回上一个路口然后就选择下一条岔路,而广度优先搜索旨在面临一个路口时,把所有的岔路口都记下来,然后选择其中一个进入,然后将它的分路情况记录下来,然后再返回来进入另外一个岔路,并重复这样的操作,用图形来表示则是这样的
2.关键
广度优先搜索关键在于重放,回放是继续遍历先前已经遍历过的结点 。
3.文字理解
广度优先搜索的方式是使用队列,运用重放的方法进行出对入队的操作从而达到目的。
就是对下一步能走通的位置进行入队,已经重放完毕的位置进行出队。
4.例题
深度优先搜索与广度优先搜索都可用于迷宫问题,那么我们依然用迷宫问题作为例题
5.例题代码
# include 总结
深度优先搜索的关键在于回溯与递归(栈)
广度优先搜索的关键在于重放与队列
这两种方法常用于迷宫问题,其实他们的原理并不难,最重要是我们能够理解算法的步骤并对之加深印象