视觉slam十四讲 学习笔记-4
目录
相机模型
单目相机
双目相机
状态估计问题
实践:点云拼接
批量状态估计问题
非线性最小二乘
实践
-----------作业------------
相机模型
单目相机
 下图中:u 轴向右与 x 轴平行,v轴向下与 y 轴平行,像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移。我们设像素坐标在 u 轴上缩放了 α 倍,在 v 上缩放了 β 倍。同时,原点平移了 [c x , c y ] T 。式3中:
下图中:u 轴向右与 x 轴平行,v轴向下与 y 轴平行,像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移。我们设像素坐标在 u 轴上缩放了 α 倍,在 v 上缩放了 β 倍。同时,原点平移了 [c x , c y ] T 。式3中:![]()
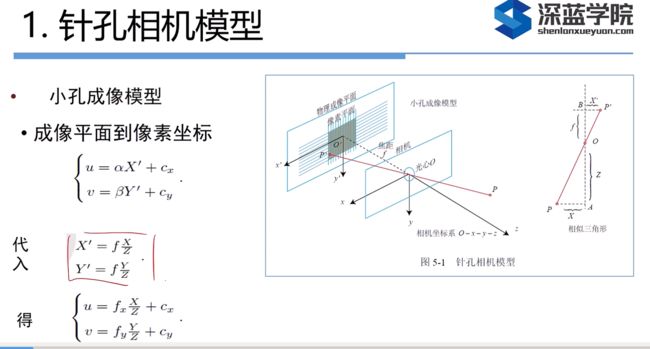
![]() 这四个参数称为相机的内参(即表示的是缩放和平移)
这四个参数称为相机的内参(即表示的是缩放和平移)![]() 一般来说是相近或者数值一样。
一般来说是相近或者数值一样。

上图中的矩阵形式乘开即为展开形式,其中矩阵即为内参矩阵K

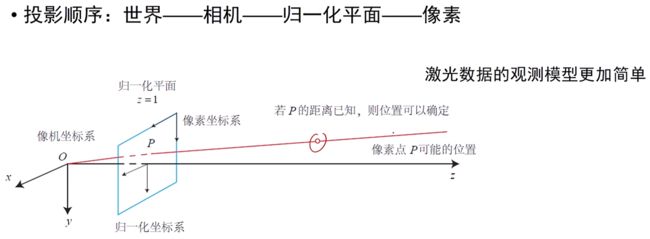
上图中:中间的量组成的矩阵称为相机的内参数矩阵K,世界坐标记为Pw,![]() 中的括号就是先将世界坐标系转化为相机的坐标系,然后乘以K内参矩阵再进行一次转换。
中的括号就是先将世界坐标系转化为相机的坐标系,然后乘以K内参矩阵再进行一次转换。![]() 这里分别是齐次和非齐次的表示方式。
这里分别是齐次和非齐次的表示方式。
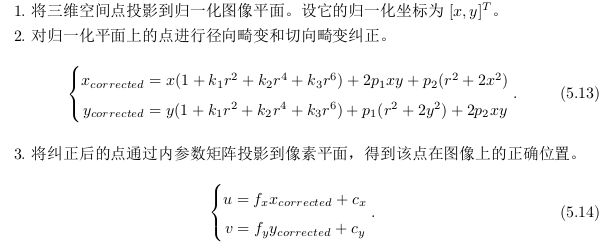
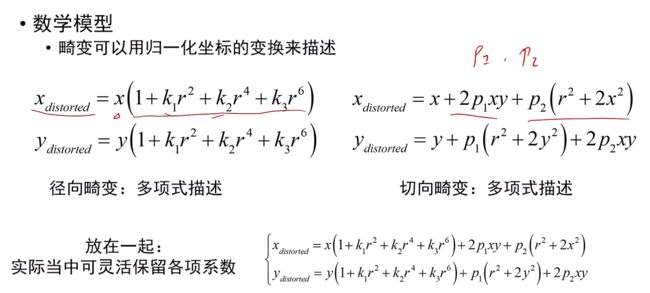
畸变:其中k和p为参数,属于相机的内参 。
我们知道平面上的任意一点 p 可以用笛卡尔坐标表示为 [x, y] T , 也可以把它写成极坐标的形式[r, θ] T ,其中 r 表示点 p 离坐标系原点的距离,θ 表示和水平轴的夹角。径向畸变可看成坐标点沿着长度方向发生了变化 δr, 也就是其距离原点的长度发生了变化。切向畸变可以看成坐标点沿着切线方向发生了变化,也就是水平夹角发生了变化 δθ。
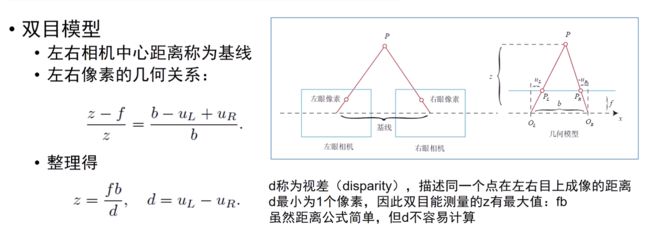
双目相机
非线性优化
牛顿法 :
牛顿法,高斯-牛顿法_gauss newton method_Yemiekai的博客-CSDN博客
LM-Levenberg–Marquardt algorithm :(1:16:20)【一起读书】视觉SLAM十四讲 第6讲(中)矩阵向量求导思路总结 非线性最小二乘若干解法原理推导分析 这讲准备了很久 希望对大家有帮助_哔哩哔哩_bilibili
最小二乘的引出: (书P123)
对于某一次观测的观测方程:
噪声项:![]() ,其中Q为一个3*3协方差矩阵。
,其中Q为一个3*3协方差矩阵。
由于噪声的存在当我们知道xy的值时候去推算出的z,z就满足正态分布(因为如果没有噪声,推出来的z肯定是一个准确的值,由于有一个满足高斯分布的噪声,那么推出来的值也是满足下面的高斯分布的):

上式中:P为条件概率,表示的是在条件xy下z所发生的概率,这里的z是一个变量,我们需要去求的,我们要去求得z取某个值的时候使得p最大(这样的含义就是在xy观测下,最有可能的位姿为z)。这个公式表示,在给定机器人位姿和地图特征的条件下,观测数据的条件概率服从(这里的等式理解为服从更好)以预测函数h为均值、以观测噪声协方差矩阵Q为协方差矩阵的高斯分布。(因为噪声是服从高斯分布的,h函数具体是一个值)
考虑一个任意的高维高斯分布 x ∼ N (μ, Σ)---μ为均值,Σ为协方差,它的概率密度函数展开形式为:
取对数
因为我们要求x取什么值时P最大,前半部分和x无关,所以这里只看这一部分
所以要求P(x)最大,就是求这部分的最小值


对于高斯分布 ,将其带入上式化简部分:
,将其带入上式化简部分:

即要求这部分的最小值
-------------------------------------------------------------
首先回顾一下两个方程,第一个是运动方程,第二个是观测方程,参考:
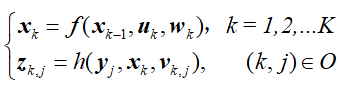
x表示机器人(相机)的实际坐标;y表示某一个特征点的实际坐标;u表示内部传感器得出来的运动量(比如我们可以使用位移传感器和IMU测得 ![]() );z也表示传感器的感知的观测量(第j个特征点的坐标);w、v表示噪声。
);z也表示传感器的感知的观测量(第j个特征点的坐标);w、v表示噪声。
我们从这篇极大似然估计的博客可以得知:我们可以通过最大化似然函数来求出最接近实际的参数值。我们这里就是要通过u和v的值来尽可能估计出x和y的值。
我们将所有待估计的变量放在一个“状态变量”中(即将x和y放在一起作为x考虑):
![]()
我们对机器人状态的估计,就是求已知输入数据 u 和观测数据 z 的条件下,计算上面的状态x的条件概率分布,记为P(x|z,u)
特别地,当我们没有测量运动的传感器,只有一张张的图像时,即只考虑观测方程带来的数据时,相当于估计 P (x|z) 的条件概率分布。
利用贝叶斯法则可以转化一下研究对象,最后是正比于P(z|x)P(x)的(因为分母部分与待估计的状态 x 无关,所以不考虑分母部分):

这时我们要求的使得P(x|z)最大化就变成了:最大化似然和先验的乘积。
如果此时在不清楚机器人具体的位姿的情况下,不知道P(x),就只能尽可能考虑最大化P(z|x)。
最大化高斯分布:
考虑一个高斯分布:
,他的概率密度函数为:
这里我们对其进行取负对数从而方便求导(因为我们要找最大值):
因为对数是一个单调函数,所以并不会改变最值的位置,而这里我们取得是负对数,所以我们之前求最大就变成了求最小。


实践:点云拼接
opencv的cmake配置:
cmake_minimum_required( VERSION 2.8 )
project( imageBasics )
# 添加c++ 11标准支持
set( CMAKE_CXX_FLAGS "-std=c++11" )
# 寻找OpenCV库
find_package( OpenCV 3 REQUIRED )
# 添加头文件
include_directories( ${OpenCV_INCLUDE_DIRS} )
add_executable( imageBasics imageBasics.cpp )
# 链接OpenCV库
target_link_libraries( imageBasics ${OpenCV_LIBS} )程序中我们演示了: 图像读取、显示、像素遍历、拷贝、赋值等。
#include
#include
using namespace std;
#include
#include
int main ( int argc, char** argv )
{
// 读取argv[1]指定的图像
cv::Mat image;
image = cv::imread ( argv[1] ); //cv::imread函数读取指定路径下的图像
// 判断图像文件是否正确读取
if ( image.data == nullptr ) //数据不存在,可能是文件不存在
{
cerr<<"文件"< ( y ); // row_ptr是第y行的头指针
for ( size_t x=0; x time_used = chrono::duration_cast>( t2-t1 );
cout<<"遍历图像用时:"< 终端运行:
cd build
cmake ..
make
./imageBasics ../ubuntu.png 安装点云:
sudo apt-get install libpcl-dev
sudo apt-get install pcl-tools
运行:
cd joinMap
build/joinMap #执行可执行程序,需要在pose.txt文件下执行这个命令
pcl_viewer map.pcd #使用pcl显示点云批量状态估计问题
这部分没太懂
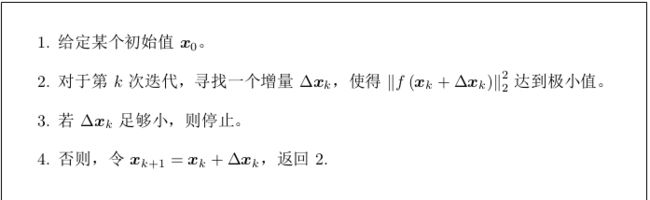
非线性最小二乘

实践:ceres和g2o
ceres安装:
Ubuntu18.04安装Ceres,图文详解_振华OPPO的博客-CSDN博客_ceres安装
使用ceres拟合曲线(求解最小二乘问题)
以下代码最重要的部分就是:struct代价函数和构建最小二乘问题
ceres的使用说明:
1. 定义 Cost Function 模型,代码中对应的是CURVE_FITTING_COST。方法是去书写一个类(这里用的struct结构体),并在类中定义带模板参数的 () 运算符。
2. 调用 AddResidualBlock 将误差项添加到目标函数中。由于优化需要梯度,我们有若
干种选择:(1)使用 Ceres 的自动求导(Auto Diff);(2)使用数值求导(Numeric Diff);(3)自行推导解析的导数形式,提供给 Ceres。其中自动求导在编码上是最方便的,于是我们就使用自动求导
3. 自动求导需要指定误差项和优化变量的维度。这里的误差则是标量( 误差为y-exp(ax^2+bx+c) ),维度只有一维。优化的是 a, b, c 三个量,维度为 3。于是,在自动求导类的模板参数中设定变量维度为1,3对应代码
4. 设定好问题后,调用 solve 函数进行求解。你可以在 option 里配置(非常详细的)优
化选项。例如,我们可以选择使用 Line Search 还是 Trust Region,迭代次数,步长
等等。读者可以查看 Options 的定义,看看有哪些优化方法可选,当然默认的配置已
经可以用在很广泛的问题上了。我这样理解:我们最终要求得是函数
这个式子的最小值,其中y代表的是在x取值的情况下实际随机生成的点的y的值(生成y是有高斯噪声的,也就是有误差的),我们代码中生成的100数据中每个x都对应一个具有误差的y值。要对整个式子求最小,其中x,y是一系列已知的值,a,b,c是变量,所以对a,b,c进行求导,也就是待优化的值,所以维度为<1,3>。
代码思路:我们要通过ceres来拟合
,即设置abc的值分别为1 2 1。我们再通过产生的100点产生的值加上随机产生高斯噪声生成100个y,从而生成了100对(x,y),当然这些x,y都是在
#include
#include
#include
#include
using namespace std;
// 代价函数的计算模型
struct CURVE_FITTING_COST
{
CURVE_FITTING_COST ( double x, double y ) : _x ( x ), _y ( y ) {}
// 残差的计算
template
bool operator() (
const T* const abc, // 模型参数,有3维
T* residual ) const // 残差
{
residual[0] = T ( _y ) - ceres::exp ( abc[0]*T ( _x ) *T ( _x ) + abc[1]*T ( _x ) + abc[2] ); // y-exp(ax^2+bx+c)
return true;
}
const double _x, _y; // x,y数据
};
int main ( int argc, char** argv )
{
double a=1.0, b=2.0, c=1.0; // 真实参数值
int N=100; // 数据点
double w_sigma=1.0; // 噪声Sigma值
cv::RNG rng; // OpenCV随机数产生器
double abc[3] = {0,0,0}; // abc参数的估计值
vector x_data, y_data; // 数据
cout<<"generating data: "< (
new CURVE_FITTING_COST ( x_data[i], y_data[i] )
),
nullptr, // 核函数,这里不使用,为空
abc // 待估计参数
);
}
// 配置求解器
ceres::Solver::Options options; // 这里有很多配置项可以填,比如迭代次数、高斯牛顿、LM等,下面一行设置了linear_solver_type的类型
options.linear_solver_type = ceres::DENSE_QR; // 增量方程如何求解,这里使用的是QR方法,还有其他:cholesky、功能梯度法等等
options.minimizer_progress_to_stdout = true; // 输出到cout
ceres::Solver::Summary summary; // 优化信息
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
ceres::Solve ( options, &problem, &summary ); // 开始优化
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration time_used = chrono::duration_cast>( t2-t1 );
cout<<"solve time cost = "< g2o安装
首先对g2o进行编译安装:g2o安装_zdb呀的博客-CSDN博客_g2o安装
然后将slambook_master中的g2o_curve_fitting中的代码复制出来打开,记得cmake_modules一并复制,因为里面的.cmake文件需要寻找依赖。
-----------作业------------
1图像去畸变

cmake_minimum_required(VERSION 3.2)
project(ch4)
#注意opencv支持c++11以上
set(CMAKE_CXX_FLAGS "-std=c++11")
find_package(OpenCV 3.2 REQUIRED)
include_directories(${OPENCV_INCLUDE_DIRS})
add_executable(ch4 undistort_image.cpp)
target_link_libraries(ch4 ${OpenCV_LIBS})//
// Created by 高翔 on 2017/12/15.
//
#include
#include
#include "cmath"
using namespace std;
string image_file = "/home/gzy/ROS/slam/ch4/test.png"; // 请确保路径正确
int main(int argc, char **argv) {
// 本程序需要你自己实现去畸变部分的代码。尽管我们可以调用OpenCV的去畸变,但自己实现一遍有助于理解。
// 畸变参数
double k1 = -0.28340811, k2 = 0.07395907, p1 = 0.00019359, p2 = 1.76187114e-05;
// 内参
double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;
cv::Mat image = cv::imread(image_file,0); // 图像是灰度图,CV_8UC1
int rows = image.rows, cols = image.cols;
cv::Mat image_undistort = cv::Mat(rows, cols, CV_8UC1); // 去畸变以后的图
// 计算去畸变后图像的内容
for (int v = 0; v < rows; v++)
for (int u = 0; u < cols; u++) {
double u_distorted = 0, v_distorted = 0;
// TODO 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted) (~6 lines)
// start your code here
double x_rescale_one=(u-cx)/fx;
double y_rescale_one=(v-cy)/fy;
double r=sqrt(pow(x_rescale_one,2)+ pow(y_rescale_one,2));
double x_distort=x_rescale_one*(1+k1*pow(r,2)+k2*pow(r,4))
+2*p1*x_rescale_one*y_rescale_one
+p2*(pow(r,2)+2*pow(x_rescale_one,2));
double y_distort=y_rescale_one*(1+k1*pow(r,2)+k2*pow(r,4))
+p1*(pow(r,2)+2*pow(y_rescale_one,2))
+2*p2*x_rescale_one*y_rescale_one;
u_distorted=fx*x_distort+cx;
v_distorted=fy*y_distort+cy;
// end your code here
// 赋值 (最近邻插值)
if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows) {
image_undistort.at(v, u) = image.at((int) v_distorted, (int) u_distorted);
} else {
image_undistort.at(v, u) = 0;
}
}
// 画图去畸变后图像
cv::imshow("image undistorted", image_undistort);
cv::waitKey();
return 0;
}
2双目视差
这里也使用了vscode试了试:具体操作看第一节的笔记

cmake_minimum_required(VERSION 3.2)
project(ch4_2)
set(CMAKE_CXX_STANDARD 14)
#Eigen
include_directories(usr/include/Eigen)
#opencv
find_package(OpenCV 3 REQUIRED)
include_directories(${OPENCV_INCLUDE_DIRS})
#pangolin
find_package(Pangolin REQUIRED)
include_directories(${Pangolin_INCLUDE_DIRS})
add_executable(ch4_2 disparity.cpp)
target_link_libraries(ch4_2 ${OpenCV_LIBRARIES})
target_link_libraries(ch4_2 ${Pangolin_LIBRARIES})
这部分代码中:书写部分在start your code 到end your code
//
// Created by 高翔 on 2017/12/15.
//
#include
#include
#include
#include
#include
using namespace std;
using namespace Eigen;
// 文件路径,如果不对,请调整
string left_file = "/home/gzy/ROS/slam/ch4-2-vs/left.png";
string right_file = "/home/gzy/ROS/slam/ch4-2-vs/right.png";
string disparity_file = "/home/gzy/ROS/slam/ch4-2-vs/disparity.png";
// 在panglin中画图,已写好,无需调整
void showPointCloud(const vector> &pointcloud);
int main(int argc, char **argv) {
// 内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 间距
double b = 0.573;
// 读取图像
cv::Mat left = cv::imread(left_file, 0);
cv::Mat right = cv::imread(right_file, 0);
cv::Mat disparity = cv::imread(disparity_file, 0); // disparty 为CV_8U,单位为像素
// 生成点云
vector> pointcloud;
// TODO 根据双目模型计算点云
// 如果你的机器慢,请把后面的v++和u++改成v+=2, u+=2
for (int v = 0; v < left.rows; v++)
for (int u = 0; u < left.cols; u++) {
Vector4d point(0, 0, 0, left.at(v, u) / 255.0); // 前三维为xyz,第四维为颜色
// start your code here (~6 lines)
// 根据双目模型计算 point 的位置
double x=(u-cx)/fx;
double y=(v-cy)/fy;
double dispar=disparity.at(v,u); //读出来(v,u)这点的视差dispar
double depth=fx*b/dispar; //这里使用的是z=fb/d的这个公式,这里公式的z就对应着depth
//还原真实坐标,只需将归一化坐标的xy乘以depth即可,z方向的就是depth
point[0]=x*depth;
point[1]=y*depth;
point[2]=depth;
pointcloud.push_back(point);
// end your code here
}
// 画出点云
showPointCloud(pointcloud);
return 0;
}
void showPointCloud(const vector> &pointcloud) {
if (pointcloud.empty()) {
cerr << "Point cloud is empty!" << endl;
return;
}
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glPointSize(2);
glBegin(GL_POINTS);
for (auto &p: pointcloud) {
glColor3f(p[3], p[3], p[3]);
glVertex3d(p[0], p[1], p[2]);
}
glEnd();
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
return;
}
4高斯牛顿法