ORB_SLAM3 TrackWithMotionModel
TrackWithMotionModel
1.更新上一帧位姿
Tracking::UpdateLastFrame()的主要作用是更新上一帧的位姿和添加一些临时的地图点,为什么要更新上一帧的位姿,主要是在ORB_SLAM中优化的是参考关键帧的位姿,对于普通帧,虽然在开始设置了位姿,但是没有参与优化,因此在下一次跟踪时,需要用优化后的参考关键帧的位姿更新上一帧的位姿
// Update pose according to reference keyframe
// Step 1:利用参考关键帧更新上一帧在世界坐标系下的位姿
// 上一普通帧的参考关键帧,注意这里用的是参考关键帧(位姿准)而不是上上一帧的普通帧
KeyFrame* pRef = mLastFrame.mpReferenceKF;
// ref_keyframe 到 lastframe的位姿变换
Sophus::SE3f Tlr = mlRelativeFramePoses.back();
// 将上一帧的世界坐标系下的位姿计算出来
// l:last, r:reference, w:world
// Tlw = Tlr*Trw
mLastFrame.SetPose(Tlr * pRef->GetPose());
-
mlRelativeFramePoses存储参考关键帧r到当前帧c的位姿 T c r T_{cr} Tcr
T c r = T c w ⋅ T r w − 1 T_{cr} = T_{cw} \cdot T_{rw}^{-1} Tcr=Tcw⋅Trw−1 -
利用参考关键帧更新上一帧在世界坐标系下的位姿
T l w = T l r ⋅ T r w T_{lw} = T_{lr}\cdot T_{rw} Tlw=Tlr⋅Trw
对于双目或rgbd,为上一帧生成新的临时地图点,主要是为了生成更多的匹配,让跟踪更好
- 临时地图点:对于上一帧中具有有效深度值
z>0的特征点,如果这个特征点在上一帧中没有对应的地图点,或者创建后没有被观测到,添加为临时地图点 - 临时地图点也不是越多越好,当满足下面两个条件停止添加:
- 当前的点的深度已经超过了设定的深度阈值(35倍基线),主要太远了不可靠
- 临时地图点已超过
100个点,说明距离比较远了,可能不准确,这里是从近的开始添加
// Step 2:对于双目或rgbd相机,为上一帧生成新的临时地图点
// 注意这些地图点只是用来跟踪,不加入到地图中,跟踪完后会删除
// Create "visual odometry" MapPoints
// We sort points according to their measured depth by the stereo/RGB-D sensor
// Step 2.1:得到上一帧中具有有效深度值的特征点(不一定是地图点)
vector<pair<float,int> > vDepthIdx;
const int Nfeat = mLastFrame.Nleft == -1? mLastFrame.N : mLastFrame.Nleft;
vDepthIdx.reserve(Nfeat);
for(int i=0; i<Nfeat;i++)
{
float z = mLastFrame.mvDepth[i];
if(z>0)
{
// vDepthIdx第一个元素是某个点的深度,第二个元素是对应的特征点id
vDepthIdx.push_back(make_pair(z,i));
}
}
// 如果上一帧中没有有效深度的点,那么就直接退出
if(vDepthIdx.empty())
return;
// 按照深度从小到大排序
sort(vDepthIdx.begin(),vDepthIdx.end());
// We insert all close points (depth
// If less than 100 close points, we insert the 100 closest ones.
// Step 2.2:从中找出不是地图点的部分
int nPoints = 0;
for(size_t j=0; j<vDepthIdx.size();j++)
{
int i = vDepthIdx[j].second;
bool bCreateNew = false;
// 如果这个点对应在上一帧中的地图点没有,或者创建后就没有被观测到,那么就生成一个临时的地图点
MapPoint* pMP = mLastFrame.mvpMapPoints[i];
if(!pMP)
bCreateNew = true;
else if(pMP->Observations()<1)
// 地图点被创建后就没有被观测,认为不靠谱,也需要重新创建
bCreateNew = true;
if(bCreateNew)
{
// Step 2.3:需要创建的点,包装为地图点。只是为了提高双目和RGBD的跟踪成功率,并没有添加复杂属性,因为后面会扔掉
// 反投影到世界坐标系中
Eigen::Vector3f x3D;
if(mLastFrame.Nleft == -1){
mLastFrame.UnprojectStereo(i, x3D);
}
else{
x3D = mLastFrame.UnprojectStereoFishEye(i);
}
// 加入上一帧的地图点中
MapPoint* pNewMP = new MapPoint(x3D,mpAtlas->GetCurrentMap(),&mLastFrame,i);
mLastFrame.mvpMapPoints[i]=pNewMP;
// 标记为临时添加的MapPoint,之后在CreateNewKeyFrame之前会全部删除
mlpTemporalPoints.push_back(pNewMP);
nPoints++;
}
else
{
// 因为从近到远排序,记录其中不需要创建地图点的个数
nPoints++;
}
// Step 2.4:如果地图点质量不好,停止创建地图点
// 停止新增临时地图点必须同时满足以下条件:
// 1、当前的点的深度已经超过了设定的深度阈值(35倍基线)
// 2、nPoints已经超过100个点,说明距离比较远了,可能不准确,停掉退出
if(vDepthIdx[j].first>mThDepth && nPoints>100)
break;
}
2.得到当前帧的初始位姿
如果IMU已初始化并且不需要reset时,使用PredictStateIMU来预测当前帧的状态,就不用通过匀速模型来得到了
PredictStateIMU
这里有两个变量控制着从哪预测
mbMapUpdated:地图是否更新mpLastKeyFrame:上一关键帧存在
于是有两种情况:
- 如果地图更新了,且上一关键帧存在,则用关键帧来进行预测
mpImuPreintegratedFromLastKF - 如果地图未更新,则用上一帧来进行预测
mpImuPreintegratedFrame
首先,根据mpImuPreintegratedFromLastKF或mpImuPreintegratedFrame得到 R b 1 b 2 R_{b_{1}b_{2}} Rb1b2、 v b 1 b 2 v_{b_{1}b_{2}} vb1b2、 p b 1 b 2 p_{b_{1}b_{2}} pb1b2
注意:这里可以参考前面的IMU预积分的理论推导中的预积分测量值更新(bias更新,一阶近似)
Δ R ^ i j ≈ Δ R ‾ i j ⋅ Exp ( ∂ Δ R ‾ i j ∂ b ‾ g δ b i g ) \Delta \hat{\mathbf{R}}_{i j} \approx \Delta \overline{\mathbf{R}}_{i j} \cdot \operatorname{Exp}\left(\frac{\partial \Delta \overline{\mathbf{R}}_{i j}}{\partial \overline{\mathbf{b}}^{g}} \delta \mathbf{b}_{i}^{g}\right) ΔR^ij≈ΔRij⋅Exp(∂bg∂ΔRijδbig)
Δ V ^ i j ≈ Δ V ‾ i j + ∂ Δ V ‾ i j ∂ b ‾ g δ b i g + ∂ Δ V ‾ i j ∂ b ‾ a δ b i a \Delta \hat{\mathbf{V}}_{i j} \approx \Delta \overline{\mathbf{V}}_{i j}+\frac{\partial \Delta \overline{\mathbf{V}}_{i j}}{\partial \overline{\mathbf{b}}^{g}} \delta \mathbf{b}_{i}^{g}+\frac{\partial \Delta \overline{\mathbf{V}}_{i j}}{\partial \overline{\mathbf{b}}^{a}} \delta \mathbf{b}_{i}^{a} ΔV^ij≈ΔVij+∂bg∂ΔVijδbig+∂ba∂ΔVijδbia
Δ p ^ i j ≈ Δ p ‾ i j + ∂ Δ p ‾ i j ∂ b ‾ g δ b i g + ∂ Δ p ‾ i j ∂ b ‾ a δ b i a \Delta \hat{\mathbf{p}}_{i j} \approx \Delta \overline{\mathbf{p}}_{i j}+\frac{\partial \Delta \overline{\mathbf{p}}_{i j}}{\partial \overline{\mathbf{b}}^{g}} \delta \mathbf{b}_{i}^{g}+\frac{\partial \Delta \overline{\mathbf{p}}_{i j}}{\partial \overline{\mathbf{b}}^{a}} \delta \mathbf{b}_{i}^{a} Δp^ij≈Δpij+∂bg∂Δpijδbig+∂ba∂Δpijδbia
Eigen::Matrix3f Preintegrated::GetDeltaRotation(const Bias &b_)
{
std::unique_lock<std::mutex> lock(mMutex);
// 计算偏置的变化量
Eigen::Vector3f dbg;
dbg << b_.bwx - b.bwx, b_.bwy - b.bwy, b_.bwz - b.bwz;
// 考虑偏置后,dR对偏置线性化的近似求解,邱笑晨《预积分总结与公式推导》P13~P14
// Forster论文公式(44)yP17也有结果(但没有推导),后面两个函数GetDeltaPosition和GetDeltaPosition也是基于此推导的
return NormalizeRotation(dR * Sophus::SO3f::exp(JRg * dbg).matrix());
}
/**
* @brief 根据新的偏置计算新的dP
* @param b_ 新的偏置
* @return dP
*/
Eigen::Vector3f Preintegrated::GetDeltaPosition(const Bias &b_)
{
std::unique_lock<std::mutex> lock(mMutex);
Eigen::Vector3f dbg, dba;
dbg << b_.bwx - b.bwx, b_.bwy - b.bwy, b_.bwz - b.bwz;
dba << b_.bax - b.bax, b_.bay - b.bay, b_.baz - b.baz;
// 考虑偏置后,dP对偏置线性化的近似求解,邱笑晨《预积分总结与公式推导》P13,JPg和JPa在预积分处理中更新
return dP + JPg * dbg + JPa * dba;
}
/**
* @brief 根据新的偏置计算新的dV
* @param b_ 新的偏置
* @return dV
*/
Eigen::Vector3f Preintegrated::GetDeltaVelocity(const Bias &b_)
{
std::unique_lock<std::mutex> lock(mMutex);
Eigen::Vector3f dbg, dba;
dbg << b_.bwx - b.bwx, b_.bwy - b.bwy, b_.bwz - b.bwz;
dba << b_.bax - b.bax, b_.bay - b.bay, b_.baz - b.baz;
// 考虑偏置后,dV对偏置线性化的近似求解,邱笑晨《预积分总结与公式推导》P13,JPg和JPa在预积分处理中更新
return dV + JVg * dbg + JVa * dba;
}
然后,估计当前帧的 R w b 2 R_{wb_{2}} Rwb2、 t w b 2 t_{wb_{2}} twb2、 v w b 2 v_{wb_{2}} vwb2
R j = R i Δ R i j v j = v i + g ⋅ Δ t i j + R i Δ v i j p j = p i + v i ⋅ Δ t i j + 1 2 g ⋅ Δ t i j 2 + R i Δ p i j \begin{align} R_{j} & = \mathbf{R}_{i}\Delta R_{ij} \\ \mathbf{v}_{j} & = \mathbf{v}_{i}+\mathbf{g} \cdot \Delta t_{i j}+\mathbf{R}_{i}\Delta \mathbf{v}_{i j} \\ \mathbf{p}_{j} & = \mathbf{p}_{i} + \mathbf{v}_{i} \cdot \Delta t_{i j} + \frac{1}{2} \mathbf{g} \cdot \Delta t_{i j}^{2}+ \mathbf{R}_{i}\Delta \mathbf{p}_{i j} \end{align} Rjvjpj=RiΔRij=vi+g⋅Δtij+RiΔvij=pi+vi⋅Δtij+21g⋅Δtij2+RiΔpij
const Eigen::Vector3f twb1 = mpLastKeyFrame->GetImuPosition();
const Eigen::Matrix3f Rwb1 = mpLastKeyFrame->GetImuRotation();
const Eigen::Vector3f Vwb1 = mpLastKeyFrame->GetVelocity();
const Eigen::Vector3f Gz(0, 0, -IMU::GRAVITY_VALUE);
const float t12 = mpImuPreintegratedFromLastKF->dT;
// 计算当前帧在世界坐标系的位姿,原理都是用预积分的位姿(预积分的值不会变化)与上一帧的位姿(会迭代变化)进行更新
// 旋转 R_wb2 = R_wb1 * R_b1b2
Eigen::Matrix3f Rwb2 = IMU::NormalizeRotation(Rwb1 * mpImuPreintegratedFromLastKF->GetDeltaRotation(mpLastKeyFrame->GetImuBias()));
// 位移
Eigen::Vector3f twb2 = twb1 + Vwb1*t12 + 0.5f*t12*t12*Gz+ Rwb1*mpImuPreintegratedFromLastKF->GetDeltaPosition(mpLastKeyFrame->GetImuBias());
// 速度
Eigen::Vector3f Vwb2 = Vwb1 + t12*Gz + Rwb1 * mpImuPreintegratedFromLastKF->GetDeltaVelocity(mpLastKeyFrame->GetImuBias());
- 设置当前帧的位姿 T c w T_{cw} Tcw和速度 V w V_{w} Vw
v w = v w b T c w = T c b ⋅ T b w \begin{align} v_{w} & = v_{wb} \\ T_{cw} & = T_{cb}\cdot T_{bw} \end{align} vwTcw=vwb=Tcb⋅Tbw
// 设置当前帧的世界坐标系的相机位姿
mCurrentFrame.SetImuPoseVelocity(Rwb2,twb2,Vwb2);
// 记录bias
mCurrentFrame.mImuBias = mpLastKeyFrame->GetImuBias();
mCurrentFrame.mPredBias = mCurrentFrame.mImuBias;
/**
* @brief 赋值位姿与速度
*/
void Frame::SetImuPoseVelocity(const Eigen::Matrix3f &Rwb, const Eigen::Vector3f &twb, const Eigen::Vector3f &Vwb)
{
mVw = Vwb;
mbHasVelocity = true;
Sophus::SE3f Twb(Rwb, twb);
Sophus::SE3f Tbw = Twb.inverse();
mTcw = mImuCalib.mTcb * Tbw;
UpdatePoseMatrices();
mbIsSet = true;
mbHasPose = true;
}
匀速模型
当无法用PredictStateIMU预测当前帧的位姿与速度时,采用匀速模型
来看下这个速度 V V V是什么:当跟踪成功或者刚刚跟丢,会更新该速度,该速度表示上一帧到当前帧的变换,其中 c c c当前帧, l l l上一帧, w w w世界坐标系
V = T c l = T c w ⋅ T w l V = T_{cl} =T_{cw}\cdot T_{wl} V=Tcl=Tcw⋅Twl
if(bOK || mState==RECENTLY_LOST)
{
if(mLastFrame.isSet() && mCurrentFrame.isSet())
{
Sophus::SE3f LastTwc = mLastFrame.GetPose().inverse();
// mVelocity = Tcl = Tcw * Twl,表示上一帧到当前帧的变换, 其中 Twl = LastTwc
mVelocity = mCurrentFrame.GetPose() * LastTwc;
mbVelocity = true;
}
else {
// 否则没有速度
mbVelocity = false;
}
}
首先,假设两帧之间的变换近似,根据速度设置当前帧的初始位姿
T c w = T c l ⋅ T l w T_{cw} = T_{cl}\cdot T_{lw} Tcw=Tcl⋅Tlw
然后,基于投影的匹配搜索SearchByProjection获得上一帧与当前帧的匹配关系,其步骤:
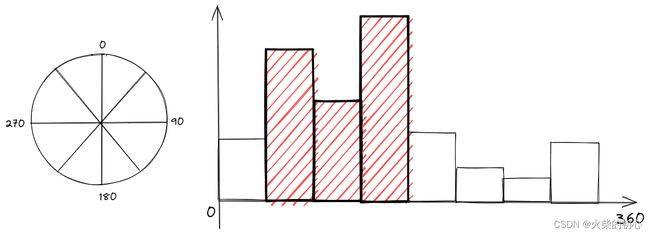
- 构建旋转直方图,用于检测旋转一致性
// Rotation Histogram (to check rotation consistency)
// Step 1 建立旋转直方图,用于检测旋转一致性
vector<int> rotHist[HISTO_LENGTH];
for(int i=0;i<HISTO_LENGTH;i++)
rotHist[i].reserve(500);
//! 原作者代码是 const float factor = 1.0f/HISTO_LENGTH; 是错误的,更改为下面代码
// const float factor = HISTO_LENGTH/360.0f;
const float factor = 1.0f/HISTO_LENGTH;
- 计算当前帧和前一帧的平移 t l c t_{lc} tlc,判断相机是前进还是后退(近大远小)(尺度越大,图像越小)
- 前进: z > b z > b z>b,物体在当前帧的图像上变大,因此对于上一帧的特征点,需要在当前帧更高的尺度上搜索
- 后退: z < − b z < -b z<−b,物体在当前帧的图像上变小,因此对于上一帧的特征点,需要在当前帧更低的尺度上搜索
// Step 2 计算当前帧和前一帧的平移向量
//当前帧的相机位姿
const Sophus::SE3f Tcw = CurrentFrame.GetPose();
const Eigen::Vector3f twc = Tcw.inverse().translation();
const Sophus::SE3f Tlw = LastFrame.GetPose();
const Eigen::Vector3f tlc = Tlw * twc;
// 判断前进还是后退
const bool bForward = tlc(2)>CurrentFrame.mb && !bMono; // 非单目情况,如果Z大于基线,则表示相机明显前进
const bool bBackward = -tlc(2)>CurrentFrame.mb && !bMono; // 非单目情况,如果-Z小于基线,则表示相机明显后退
- 对于前一帧的每一个地图点,通过相机投影模型,投影到当前帧
// 对上一帧有效的MapPoints投影到当前帧坐标系
Eigen::Vector3f x3Dw = pMP->GetWorldPos();
Eigen::Vector3f x3Dc = Tcw * x3Dw;
const float xc = x3Dc(0);
const float yc = x3Dc(1);
const float invzc = 1.0/x3Dc(2);
if(invzc<0)
continue;
// 投影到当前帧中
Eigen::Vector2f uv = CurrentFrame.mpCamera->project(x3Dc);

- 根据相机的前进后退方向来判断搜索尺度范围
- 前进: z > b z > b z>b,物体在当前帧的图像上变大,因此对于上一帧的特征点,需要在当前帧更高的尺度上搜索
- 后退: z < − b z < -b z<−b,物体在当前帧的图像上变小,因此对于上一帧的特征点,需要在当前帧更低的尺度上搜索

// 认为投影前后地图点的尺度信息不变
int nLastOctave = (LastFrame.Nleft == -1 || i < LastFrame.Nleft) ? LastFrame.mvKeys[i].octave
: LastFrame.mvKeysRight[i - LastFrame.Nleft].octave;
// Search in a window. Size depends on scale
// 单目:th = 7,双目:th = 15
float radius = th*CurrentFrame.mvScaleFactors[nLastOctave]; // 尺度越大,搜索范围越大
// 记录候选匹配点的id
vector<size_t> vIndices2;
// Step 4 根据相机的前后前进方向来判断搜索尺度范围。
// 以下可以这么理解,例如一个有一定面积的圆点,在某个尺度n下它是一个特征点
// 当相机前进时,圆点的面积增大,在某个尺度m下它是一个特征点,由于面积增大,则需要在更高的尺度下才能检测出来
// 当相机后退时,圆点的面积减小,在某个尺度m下它是一个特征点,由于面积减小,则需要在更低的尺度下才能检测出来
if(bForward) // 前进,则上一帧兴趣点在所在的尺度nLastOctave<=nCurOctave
vIndices2 = CurrentFrame.GetFeaturesInArea(uv(0),uv(1), radius, nLastOctave);
else if(bBackward) // 后退,则上一帧兴趣点在所在的尺度0<=nCurOctave<=nLastOctave
vIndices2 = CurrentFrame.GetFeaturesInArea(uv(0),uv(1), radius, 0, nLastOctave);
else // 在[nLastOctave-1, nLastOctave+1]中搜索
vIndices2 = CurrentFrame.GetFeaturesInArea(uv(0),uv(1), radius, nLastOctave-1, nLastOctave+1);
if(vIndices2.empty())
continue;
- 遍历候选匹配点,寻找距离最小的最佳匹配点
- 这里就简单选了个最佳匹配点,其他的像剔除重复匹配,最佳和次佳比都没做
const cv::Mat dMP = pMP->GetDescriptor();
int bestDist = 256;
int bestIdx2 = -1;
// Step 5 遍历候选匹配点,寻找距离最小的最佳匹配点
for(vector<size_t>::const_iterator vit=vIndices2.begin(), vend=vIndices2.end(); vit!=vend; vit++)
{
const size_t i2 = *vit;
// 如果该特征点已经有对应的MapPoint了,则退出该次循环
if(CurrentFrame.mvpMapPoints[i2])
if(CurrentFrame.mvpMapPoints[i2]->Observations()>0)
continue;
if(CurrentFrame.Nleft == -1 && CurrentFrame.mvuRight[i2]>0)
{
// 双目和rgbd的情况,需要保证右图的点也在搜索半径以内
const float ur = uv(0) - CurrentFrame.mbf*invzc;
const float er = fabs(ur - CurrentFrame.mvuRight[i2]);
if(er>radius)
continue;
}
const cv::Mat &d = CurrentFrame.mDescriptors.row(i2);
const int dist = DescriptorDistance(dMP,d);
if(dist<bestDist)
{
bestDist=dist;
bestIdx2=i2;
}
}
- 计算匹配点对的旋转角度差所在的直方图
// 最佳匹配距离要小于设定阈值
if(bestDist<=TH_HIGH)
{
CurrentFrame.mvpMapPoints[bestIdx2]=pMP;
nmatches++;
// Step 6 计算匹配点旋转角度差所在的直方图
if(mbCheckOrientation)
{
cv::KeyPoint kpLF = (LastFrame.Nleft == -1) ? LastFrame.mvKeysUn[i]
: (i < LastFrame.Nleft) ? LastFrame.mvKeys[i]
: LastFrame.mvKeysRight[i - LastFrame.Nleft];
cv::KeyPoint kpCF = (CurrentFrame.Nleft == -1) ? CurrentFrame.mvKeysUn[bestIdx2]
: (bestIdx2 < CurrentFrame.Nleft) ? CurrentFrame.mvKeys[bestIdx2]
: CurrentFrame.mvKeysRight[bestIdx2 - CurrentFrame.Nleft];
float rot = kpLF.angle-kpCF.angle;
if(rot<0.0)
rot+=360.0f;
int bin = round(rot*factor);
if(bin==HISTO_LENGTH)
bin=0;
assert(bin>=0 && bin<HISTO_LENGTH);
rotHist[bin].push_back(bestIdx2);
}
}
- 进行旋转一致检测,剔除不一致的匹配
//Apply rotation consistency
// Step 7 进行旋转一致检测,剔除不一致的匹配
if(mbCheckOrientation)
{
int ind1=-1;
int ind2=-1;
int ind3=-1;
ComputeThreeMaxima(rotHist,HISTO_LENGTH,ind1,ind2,ind3);
for(int i=0; i<HISTO_LENGTH; i++)
{
// 对于数量不是前3个的点对,剔除
if(i!=ind1 && i!=ind2 && i!=ind3)
{
for(size_t j=0, jend=rotHist[i].size(); j<jend; j++)
{
CurrentFrame.mvpMapPoints[rotHist[i][j]]=static_cast<MapPoint*>(NULL);
nmatches--;
}
}
}
}
3.优化
得到上一帧与当前帧的匹配关系后,利用3D-2D投影关系优化当前帧位姿PoseOptimization
PoseOptimization
PoseOptimization主要的作用是利用重投影优化单帧的位姿,主要用在Tracking的几种跟踪模式TrackWithMotionModel、TrackReferenceKeyFrame、 TrackLocalMap、Relocalization中

输入
| 优化变量 | 观测 | |
|---|---|---|
| 帧的Pose | 帧的MapPoint | 帧的KeyPoint |
初始化
//创建优化器
g2o::SparseOptimizer optimizer;
g2o::BlockSolver_6_3::LinearSolverType * linearSolver;
//创建线性求解器
linearSolver = new g2o::LinearSolverDense<g2o::BlockSolver_6_3::PoseMatrixType>();
//创建块求解器 6 位姿 3 地图点
g2o::BlockSolver_6_3 * solver_ptr = new g2o::BlockSolver_6_3(linearSolver);
//设置优化算法
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg(solver_ptr);
optimizer.setAlgorithm(solver);
设置vertex
- VertexSE3Expmap
- 设置估计值: T c w T_{cw} Tcw
- 设置Id
- 是否固定:False
g2o::VertexSE3Expmap * vSE3 = new g2o::VertexSE3Expmap();
Sophus::SE3<float> Tcw = pFrame->GetPose();
//需要将Tcw转换为SE3Quat
vSE3->setEstimate(g2o::SE3Quat(Tcw.unit_quaternion().cast<double>(),Tcw.translation().cast<double>()));
vSE3->setId(0);
vSE3->setFixed(false);
optimizer.addVertex(vSE3);
VertexSE3Expmap
| 优化变量 | 类型 | 维度 |
|---|---|---|
| T c w T_{cw} Tcw | SE3Quat |
6 |
VertexSE3Expmap:SE3类型顶点在内部用变换矩阵参数化,在外部用指数映射参数化SE3Quat用四元数表示旋转,在更新时将6维的前3维通过李群李代数进行指数映射为旋转矩阵,然后再转换为四元数,内部操作采用四元数- 更新:
T ~ c w = E x p δ ϕ ⃗ ⋅ T c w \tilde{T}_{cw} = \mathbf{Exp}{\delta\vec{\phi}}\cdot T_{cw} T~cw=Expδϕ⋅Tcw
// 6维,类型SE3Quat
class VertexSE3Expmap : public BaseVertex<6, SE3Quat>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
VertexSE3Expmap();
bool read(std::istream& is);
bool write(std::ostream& os) const;
virtual void setToOriginImpl() {
_estimate = SE3Quat();
}
virtual void oplusImpl(const double* update_) {
//获得delta
Eigen::Map<const Vector6d> update(update_);
// 更新,指数映射,设置估计值
setEstimate(SE3Quat::exp(update)*estimate());
}
};
设置edge
对于每一对地图点-特征点添加重投影残差边:
- EdgeSE3ProjectXYZOnlyPose
- 设置vertex:
g2o::VertexSE3Expmap - 设置观测obs:
keyPoint - 设置信息矩阵
- 设置鲁棒核函数:huber核
- 设置huber核的的δ
- 设置相机内参
- 设置地图点
- 设置vertex:
Eigen::Matrix<double,2,1> obs;
const cv::KeyPoint &kpUn = pFrame->mvKeysUn[i];
obs << kpUn.pt.x, kpUn.pt.y;
// 新建节点,只优化位姿
ORB_SLAM3::EdgeSE3ProjectXYZOnlyPose* e = new ORB_SLAM3::EdgeSE3ProjectXYZOnlyPose();
//设置vertex和观测
e->setVertex(0, dynamic_cast<g2o::OptimizableGraph::Vertex*>(optimizer.vertex(0)));
e->setMeasurement(obs);
//设置信息矩阵
const float invSigma2 = pFrame->mvInvLevelSigma2[kpUn.octave];
e->setInformation(Eigen::Matrix2d::Identity()*invSigma2);
//设置huber核函数
g2o::RobustKernelHuber* rk = new g2o::RobustKernelHuber;
e->setRobustKernel(rk);
rk->setDelta(deltaMono);
//设置相机内参
e->pCamera = pFrame->mpCamera;
//设置地图点
cv::Mat Xw = pMP->GetWorldPos();
e->Xw[0] = Xw.at<float>(0);
e->Xw[1] = Xw.at<float>(1);
e->Xw[2] = Xw.at<float>(2);
optimizer.addEdge(e);
EdgeSE3ProjectXYZOnlyPose
- 属性:一元边
- 观测: p = ( u , v ) p=\left(u,v\right) p=(u,v)
- 优化变量: T c w T_{cw} Tcw
- 残差: e r r = p − π ( T c w ⋅ P w ) err = p-\pi \left(T_{cw} \cdot P_{w}\right) err=p−π(Tcw⋅Pw)
// 2 观测的维度
// Eigen::Vector2d 观测的类型
// g2o::VertexSE3Expmap vertex的类型
class EdgeSE3ProjectXYZOnlyPose: public g2o::BaseUnaryEdge<2, Eigen::Vector2d, g2o::VertexSE3Expmap>{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
EdgeSE3ProjectXYZOnlyPose(){}
bool read(std::istream& is);
bool write(std::ostream& os) const;
void computeError() {
//获取顶点
const g2o::VertexSE3Expmap* v1 = static_cast<const g2o::VertexSE3Expmap*>(_vertices[0]);
//获取观测
Eigen::Vector2d obs(_measurement);
//计算残差
_error = obs-pCamera->project(v1->estimate().map(Xw));
}
bool isDepthPositive() {
const g2o::VertexSE3Expmap* v1 = static_cast<const g2o::VertexSE3Expmap*>(_vertices[0]);
return (v1->estimate().map(Xw))(2)>0.0;
}
virtual void linearizeOplus();
Eigen::Vector3d Xw; //地图点
GeometricCamera* pCamera; //相机模型
};
- jacobian
∂ e ∂ δ ξ = ∂ e ∂ P C ∂ P C ∂ δ ξ \frac{\partial \boldsymbol{e}}{\partial \delta \boldsymbol{\xi}}=\frac{\partial \boldsymbol{e}}{\partial \boldsymbol{P}_{C}} \frac{\partial \boldsymbol{P}_{C}}{\partial \delta \boldsymbol{\xi}} ∂δξ∂e=∂PC∂e∂δξ∂PC
其中:
∂ e ∂ P C = − ( ∂ u c a l ∂ X C ∂ u c a l ∂ Y C ∂ u c a l ∂ Z C ∂ v c a l ∂ X C ∂ v c a l ∂ Y C ∂ v c a l ∂ Z C ) = − ( f z Z C 0 − f x X C ( Z C ) 2 0 f y Z C − f y Y C ( Z C ) 2 ) \frac{\partial \boldsymbol{e}}{\partial \boldsymbol{P}^{C}}=-\left(\begin{array}{lll} \frac{\partial u_{\mathrm{cal}}}{\partial X^{C}} & \frac{\partial u_{\mathrm{cal}}}{\partial Y^{C}} & \frac{\partial u_{\mathrm{cal}}}{\partial Z^{C}} \\ \frac{\partial v_{\mathrm{cal}}}{\partial X^{C}} & \frac{\partial v_{\mathrm{cal}}}{\partial Y^{C}} & \frac{\partial v_{\mathrm{cal}}}{\partial Z^{C}} \end{array}\right)=-\left(\begin{array}{ccc} \frac{f_{z}}{Z^{C}} & 0 & -\frac{f_{x} X^{C}}{\left(Z^{C}\right)^{2}} \\ 0 & \frac{f_{y}}{Z^{C}} & -\frac{f_{y} Y^{C}}{\left(Z^{C}\right)^{2}} \end{array}\right) ∂PC∂e=−(∂XC∂ucal∂XC∂vcal∂YC∂ucal∂YC∂vcal∂ZC∂ucal∂ZC∂vcal)=− ZCfz00ZCfy−(ZC)2fxXC−(ZC)2fyYC
∂ P C ∂ δ ξ = ∂ ( T P W ) ∂ δ ξ = ( T P W ) ⊙ = [ I ( P W ) ∧ ] \frac{\partial \boldsymbol{P}^{C}}{\partial \delta \boldsymbol{\xi}}=\frac{\partial\left(\boldsymbol{T} \boldsymbol{P}^{W}\right)}{\partial \delta \boldsymbol{\xi}}=\left(\boldsymbol{T} \boldsymbol{P}^{W}\right)^{\odot} =\begin{bmatrix} I &\left(\boldsymbol{P}^{W}\right)^{\wedge} \end{bmatrix} ∂δξ∂PC=∂δξ∂(TPW)=(TPW)⊙=[I(PW)∧]
void EdgeSE3ProjectXYZOnlyPose::linearizeOplus() {
g2o::VertexSE3Expmap * vi = static_cast<g2o::VertexSE3Expmap *>(_vertices[0]);
Eigen::Vector3d xyz_trans = vi->estimate().map(Xw);
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
Eigen::Matrix<double,3,6> SE3deriv;
SE3deriv << 0.f, z, -y, 1.f, 0.f, 0.f,
-z , 0.f, x, 0.f, 1.f, 0.f,
y , -x , 0.f, 0.f, 0.f, 1.f;
_jacobianOplusXi = -pCamera->projectJac(xyz_trans) * SE3deriv;
}
优化策略
- 分4次优化,每次迭代10次
- 每次优化,评估每条重投影边的残差
- 如果大于阈值,设置为
level = 1,不再参与优化 - 如果小于阈值,设置为
level = 0
- 如果大于阈值,设置为
- 从第3次开始,不再使用鲁棒核函数
e->setRobustKernel(0)
恢复
g2o::VertexSE3Expmap* vSE3_recov = static_cast<g2o::VertexSE3Expmap*>(optimizer.vertex(0));
g2o::SE3Quat SE3quat_recov = vSE3_recov->estimate();
cv::Mat pose = Converter::toCvMat(SE3quat_recov);
pFrame->SetPose(pose);
4.剔除当前帧中地图点中的外点
int nmatchesMap = 0;
for(int i =0; i<mCurrentFrame.N; i++)
{
if(mCurrentFrame.mvpMapPoints[i])
{
if(mCurrentFrame.mvbOutlier[i])
{
// 如果优化后判断某个地图点是外点,清除它的所有关系
MapPoint* pMP = mCurrentFrame.mvpMapPoints[i];
mCurrentFrame.mvpMapPoints[i]=static_cast<MapPoint*>(NULL);
mCurrentFrame.mvbOutlier[i]=false;
if(i < mCurrentFrame.Nleft){
pMP->mbTrackInView = false;
}
else{
pMP->mbTrackInViewR = false;
}
pMP->mnLastFrameSeen = mCurrentFrame.mnId;
nmatches--;
}
else if(mCurrentFrame.mvpMapPoints[i]->Observations()>0)
// 累加成功匹配到的地图点数目
nmatchesMap++;
}
}