LSTM学习总结
本文章参考了如下若干文章链接,感谢各位博主的知识总结,如果觉得不合适,请联系我,我会立即删除相关内容,谢谢。
链接1
链接2
1. 原理
(1)RNN-循环神经网络
1.1 背景
- RNN 对序列特性的数据非常有效,可以挖掘数据中时序信息以及语义信息,可以使深度学习模型在解决语音识别、语言模型、机器翻译以及时序分析等自然语言处理领域的问题时有所突破。
- 序列特性:符合时间顺序,逻辑顺序或者其他顺序就叫序列特性。
- 其他神经网络,如全连接神经网络,没办法结合上下文去训练模型,而是单独地训练某个输入,于是就有了循环神经网络。
1.2 原理
-
RNN的基本结构:
图1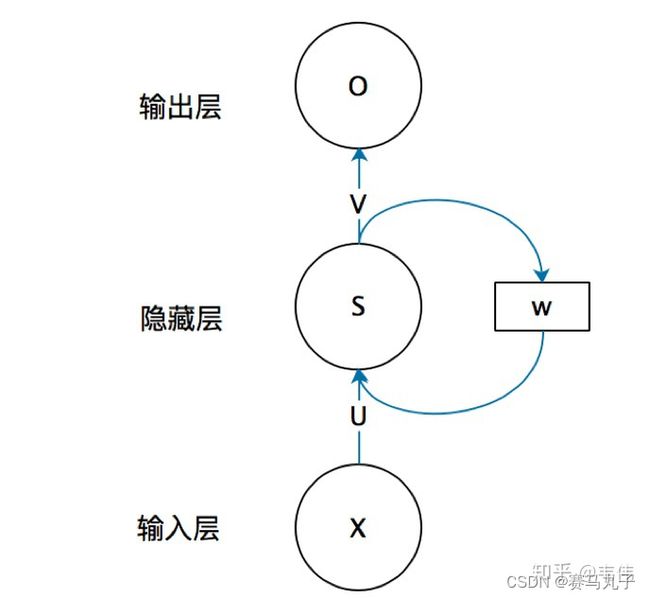
-
上图可以看到存在参数X、U、S、W、V、O,其中X为输入,U为输入层到隐藏层的参数矩阵,S表示隐藏层向量,V表示隐藏层到输出层的参数矩阵,O表示输出。抛开W,X->O的数据传播过程其实就是一个全连接神经网络的传播过程(X等价于输入,U等价于w41…;S等价于a部分;V等价于w84…部分;O等价于Y输出)。
图2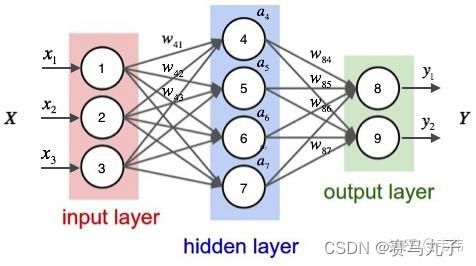
-
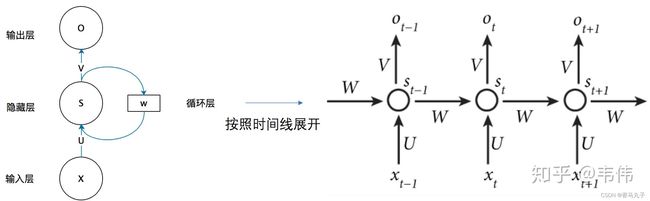
W的作用在循环训练过程中发挥作用,按照时间线可将训练过程展开为如下形式。神经网咯的输出Ot不仅与本时刻输入有关,还与上一时刻的隐藏层值决定,输入与输出之间的泛函形式如下:
Q t = g ( V ⋅ S t ) Q_t=g(V \sdot S_t) Qt=g(V⋅St)
S t = f ( U ⋅ X t + W ⋅ S t − 1 ) S_t=f(U \sdot X_t+W \sdot S_{t-1}) St=f(U⋅Xt+W⋅St−1)
图3
(2)LSTM详解
2.1 背景
-
当句子很长之后,RNN会出现梯度消失的问题,LSTM为解决该问题应运而生,相关论文发表于1997年。
-
与RNN类似,LSTM在单组数据训练过程中,本质也是同一个网络在一个序列输入下的形式。只是由于输入数据为序列形式,因此按照时间展开训练过程,示意图如下。
图4
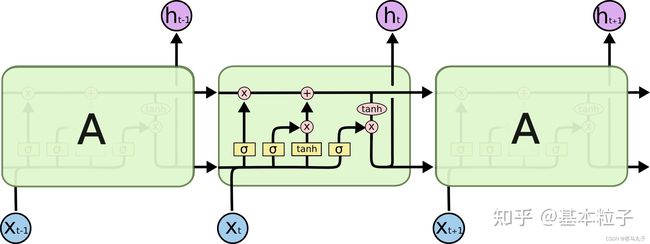
图5

-
接下来对上图4中的运行机制进行解释。可以看到图中训练过程仍以序列形式展现,实际上全程仍仅一个神经网络的参数在更新,就是图中绿色部分。绿色框内又分几个小模块,每个模块通过颜色和形状可以分辨其功能,具体对照表参考图5。
-
橙黄色矩形:神经网络层,即 w T x + b w^Tx+b wTx+b操作,区别在于使用不同的激活函数,三个 σ \sigma σ部分使用的是sigmoid函数,将数据压缩到[0,1]范围内;
tanh()部分使用的是双曲正切函数,可将数据归一化到[-1,1]区间。 -
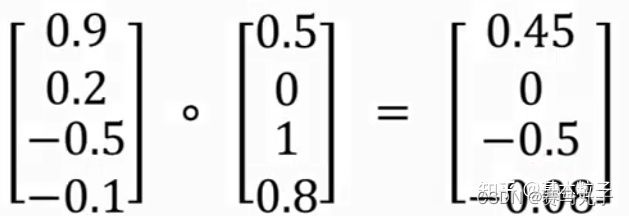
浅粉色圆型:pointwise operation指的是矩阵按位操作,即两个维数相同的矩阵,同样位置的元素相乘或相加后放到新矩阵的同样位置上,示意过程如下。
-
Vector transfer:矩阵值传递
-
Concatenate:矩阵连接,两个矩阵不做任何运算,只是连接在一起,比如原来A矩阵10维,B矩阵5维,连接之后的C矩阵为15维。
-
**Copy:**矩阵赋值
2.2 网络框架
图6
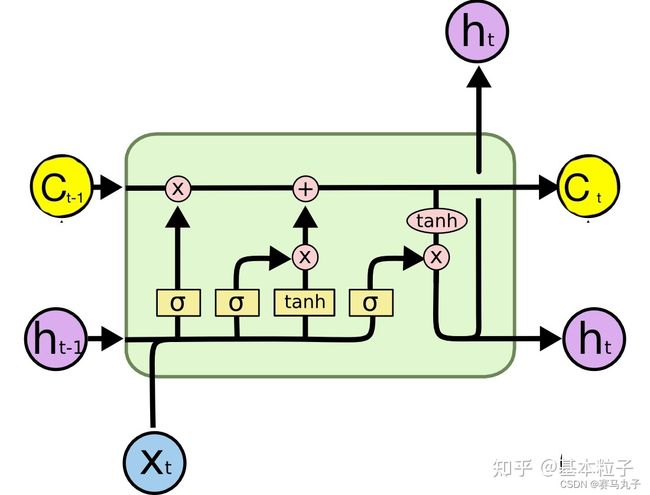
- LSTM结构如图6所示,表示一个时刻t的输入和输出。与RNN相比,LSTM增加了一个细胞状态 C t ( c e l l s t a t e ) C_t(cell ~state) Ct(cell state)。因此t时刻的输入为 C t − 1 C_{t-1} Ct−1、 h t − 1 h_{t-1} ht−1,以及 X t X_t Xt;t时刻的输出为 h t h_t ht和 C t C_t Ct。
2.3 LSTM的门结构
- LSTM的网络结构已在图6中给出,该结构可分为三个部分,分别是遗忘门,更新门以及输出门;
(1)遗忘门
- 遗忘门处理的是 X t X_t Xt和 h t − 1 h_{t-1} ht−1的输入,其结果分别传递给更新门和参与细胞状态 C t − 1 C_{t-1} Ct−1的更新。
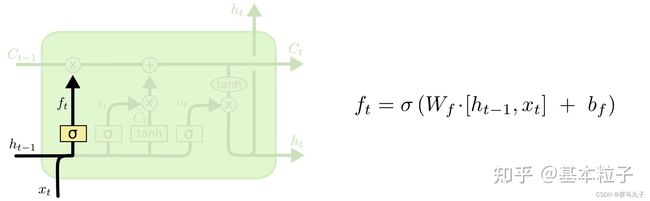
其中 [ h t − 1 , x t ] [h_{t-1},x_t] [ht−1,xt]指的是两个向量直接连接,操作如下,图中省去了 + b f +b_f +bf的操作
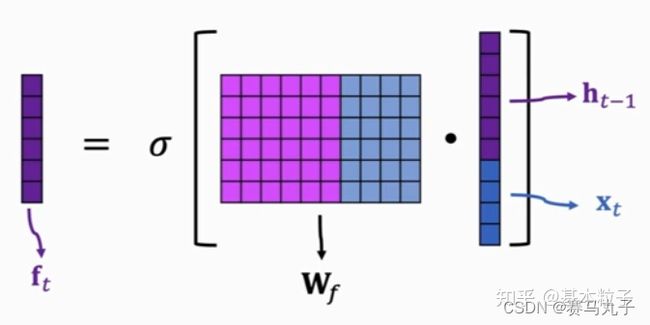
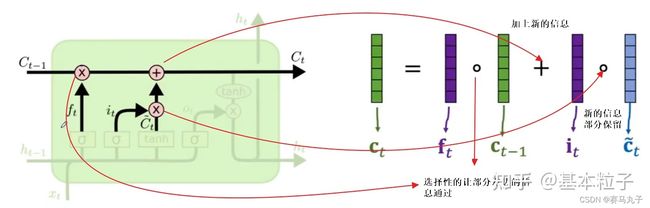
此处为何被称为遗忘门,摘抄自该博主的想法:“ σ \sigma σ的输出在0到1之间,这个输出 f t f_t ft逐位与 C t − 1 C_{t-1} Ct−1的元素相乘,我们可以发现,当f_t的某一位的值为0的时候,这 C t − 1 C_{t-1} Ct−1对应那一位的信息就被干掉了,而值为 ( 0 , 1 ) (0, 1) (0,1),对应位的信息就保留了一部分,只有值为1的时候,对应的信息才会完整的保留。因此,这个操作被称之为遗忘门。”
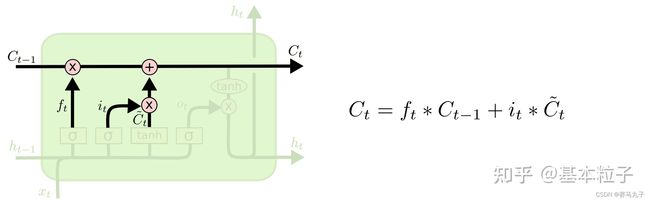
(2)更新门
-
数据更新流程;

-
接下来更新 C t C_t Ct,
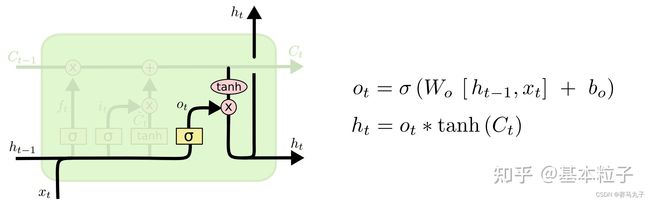
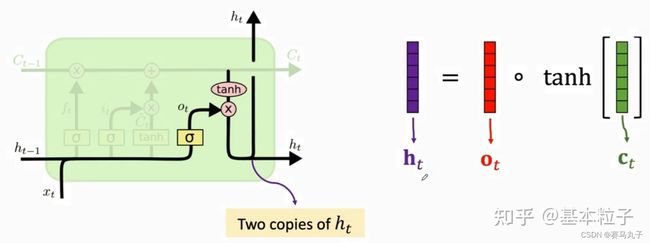
(3)输出门
- 输出为 h t h_t ht,可以看到其和输入 h t − 1 h_{t-1} ht−1、 x t x_t xt以及更新后的 C t C_t Ct有关,
补充:PyTorch里的LSTM稍有不同,其公式如下:
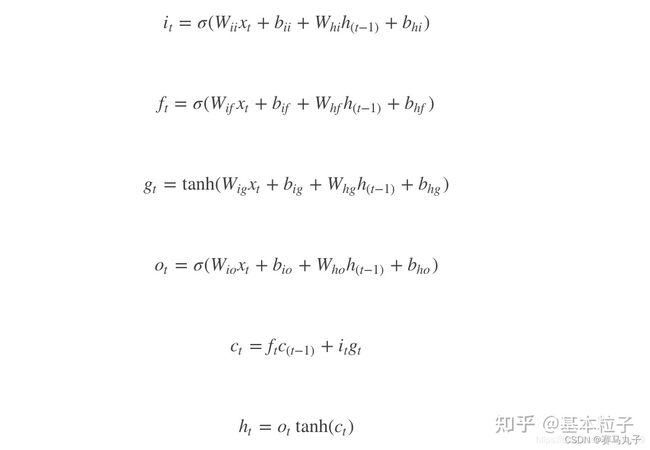
上面的 g t g_t gt其实就是 C t ~C_t Ct,其他符号基本是一致的。可以看到,pytorch中, x t x_t xt与 h t − 1 h_{t-1} ht−1并没有拼接在一起,而是各自做了对应的运算,这其实就是使用了分块矩阵的技巧进行计算,结果理论上是一样的,不过这里有些不同的就是加了两个bias,因此计算偏置的参数需要乘2。
(3)Pytorch调用LSTM的输入和输出形式
nn.lstm是继承nn.RNNBase,初始化定义如下:
- input_size:输入特征维度,如温度、湿度、重量等为3个维度,input_size=3。
- hidden_size:隐藏层大小。
- num_layers:隐藏层数量。
- bias:默认为True,若设为False,则隐藏层不使用偏差。
- batch_first:默认为False,此时与常见的神经网络不同,输入数据为**(seq_length, batch,feature)。当设置为True时,此时输入数据可为(batch,seq_length,feature)**,一般将batch设置为True。
- dropout:默认为0,若非0,则在除了最后一层的其他层都插入dropout层。
- bidirectional:默认为False,若设置为True,则表示双向LSTM。
class RNNBase(Module):
...
def __init__(self, mode, input_size, hidden_size,
num_layers=1, bias=True, batch_first=False,
dropout=0., bidirectional=False):
(4) 输入维度,摘抄自该博文
当batch_first设置为True使,输入数据集维度为(batch, seq_length, input_size),其中:
seq_len表示文本长度,即输入序列的长度,比如输入为365天里每天的温度和湿度信息,则seq_length=365;input_size:输入的特征维度,对应上一环节的温度和湿度,此值为2。
(5) 输出维度,摘抄自该博文
当batch_first为True时,此时输出维度为(batch,seq_len,hidden_size*num_directions),hidden_size表示隐藏层长度,num_directions根据不同情境确定,普通LSTM该值为1, 双LSTM该值为2。
(6)待解决问题:
- 输入序列的间隔是否固定?
- 输入序列的维度是否要全部保持一致?
3. 代码
main.py
import torch
import torch.nn as nn
import numpy as np
from trainer import *
from LSTM import *
data_dir="my.mat"
# 初始化模型
input_size = 2 # 输入特征维度为1
hidden_size = 64 # 隐含层大小为64
hidden_num_layers=2 #隐藏层数
output_size = 1 # 输出特征维度为1
lstm_model = RNN(input_size, hidden_size, hidden_num_layers,output_size)
# 设置训练参数
epoch = 1
batch_size = 1
trainer=Trainer(rnn_model,epoch=epoch,batch_size=batch_size,data_path=data_dir,lr=1e-3)
train=1
test=1
if train:
trainer.train()
if test:
trainer.test()
LSTM.py
import torch
import torch.nn as nn
class RNN(nn.Module):
def __init__(self, input_size, hidden_size,hidden_num_layers, output_size):
super(RNN, self).__init__()
self.rnn = nn.LSTM(input_size, hidden_size,num_layers=hidden_num_layers,batch_first=True)
self.fc = nn.Linear(hidden_size, output_size)#根据不同情境的输出维度,还需要添加全连接层进行维度转换。
def forward(self, x):
out, _ = self.rnn(x)
seq_len,batch_size,hidden_size=out.shape
out=out.view(-1,hidden_size)
out = self.fc(out)
out=out.view(seq_len,batch_size,-1)
return out
class AverageMeter(object):
"""Computes and stores the average and current value"""
def __init__(self):
self.reset()
def reset(self):
self.val = 0
self.avg = 0
self.sum = 0
self.count = 0
self.vals=[]
def update(self, val, n=1):
self.val = val
self.vals.append(val)
self.sum += val * n
self.count += n
self.avg = self.sum / self.count
Datasets.py
import scipy.io as scio
import torch
import torch.nn as nn
import numpy as np
import torch.utils.data as Data
from torch.utils.data import Dataset
class Dataset_new(Dataset):
def __init__(self) -> None:
return
@staticmethod
def get_img_info(filename,time_size=100,train=False,test=False,val=False):
load_mat = scio.loadmat(filename)
feature1 = load_mat['temperture']
feature2 = load_mat['humidity']
tags = load_mat['weather']
data_info=[]
if train:
size=int(len(feature1)*0.8)
for i in range(size):
temp=np.array(feature1[i])
temp=temp.reshape(time_size,1)
temp2=np.array(feature2[i])
temp2=temp.reshape(time_size,1)
features=np.hstack((temp,temp2))
features=torch.Tensor(features)
tag=tags[i]
tag=np.array(tag)
tag=torch.Tensor(tag).view(time_size,1)
data_info.append((features,tag))
if test:
size=int(len(feature1)*0.8)
size2=int(len(feature1)*0.9)
for i in range(size,size2):
temp=np.array(feature1[i])
temp=temp.reshape(time_size,1)
temp2=np.array(feature2[i])
temp2=temp.reshape(time_size,1)
features=np.hstack((temp,temp2))
features=torch.Tensor(features)
tag=tags[i]
tag=np.array(tag)
tag=torch.Tensor(tag).view(time_size,1)
data_info.append((features,tag))
if val:
size=int(len(feature1)*0.9)
size2=int(len(feature1))
# print(size, size2)
for i in range(size,size2):
temp=np.array(feature1[i])
temp=temp.reshape(time_size,1)
temp2=np.array(feature2[i])
temp2=temp.reshape(time_size,1)
features=np.hstack((temp,temp2))
features=torch.Tensor(features)
tag=tags[i]
tag=np.array(tag)
tag=torch.Tensor(tag).view(time_size,1)
data_info.append((features,tag))
return data_info
Trainer.py
from RNN import *
from dataset import *
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
from torch.nn.modules import loss
import torch.optim as optim
from torch.optim.lr_scheduler import StepLR #用于动态调整任意优化算法的学习率,可定义step_size以及gamma值
from torch.utils.data import DataLoader
import os
import shutil
import time
from torch.utils.tensorboard import SummaryWriter
def save_model(state,is_best=None,save_dir=None):
last_model=os.path.join(save_dir,'last_model.pth')
torch.save(state,last_model)
if is_best:
best_model=os.path.join(save_dir,'best_model.pth')
shutil.copyfile(last_model,best_model)# 将last_model文件复制到best_model中
class Trainer():
def __init__(self,model,epoch,optimizer='Adam',batch_size=32,data_path="",lr=1e-3):
self.model=model
self.device=torch.device("cuda")
self.criterion=nn.MSELoss(reduction="mean")
self.model_name=self.model.__class__.__name__
self.epochs=epoch
self.batch_size=batch_size
if optimizer in ['Adam']:
self.optimizer=optim.Adam(self.model.parameters(),lr=lr)
if optimizer in ['SGD']:
self.optimizer=optim.SGD(self.model.parameters(),lr=1e-3)
if optimizer in ['RMSdrop']:
self.optimizer=optim.RMSdrop(self.model.parameters(),lr=1e-3,alpha=0.99,eps=1e-08)
if optimizer in ['Momentum']:
self.optimizer=optim.SGD(self.model.parameters(),lr=1e-3,momentum=0.5)
self.model=self.model.to(self.device)
self.model.zero_grad()
dataset=Dataset_new()
self.train_data=dataset.get_img_info(data_path,time_size=100,train=True) #训练集
self.val_data=dataset.get_img_info(data_path,time_size=100,val=True) # 验证集
self.test_data=dataset.get_img_info(data_path,time_size=100,test=True) # 测试集
def _model_path(self):
if not os.path.exists('./checkpoints/checkpoints'):
os.mkdir('./checkpoints/checkpoints')
path=os.path.join('./checkpoints/checkpoints',self.model_name)
if not os.path.exists(path):
os.mkdir(path)
return path
def train(self):
# 利用batch size方法获取训练集和验证集
train_loader = DataLoader(self.train_data,batch_size=self.batch_size,shuffle=True)
val_loader = DataLoader(self.val_data, batch_size=self.batch_size,shuffle=True)
best_loss=1e10
val_loss=AverageMeter()
for epoch in range(self.epochs):
for batch_idx,(data,tags) in enumerate(train_loader):
data=data.to(self.device)
tags=tags.to(self.device)
self.optimizer.zero_grad()
output=self.model(data)
loss=self.criterion(output,tags)
loss.backward()
self.optimizer.step()
with torch.no_grad():# 验证精度
val_loss.reset()
for x,(data,tags) in enumerate(val_loader):
data=data.to(self.device)
tags=tags.to(self.device)
output=self.model(data)
loss2=self.criterion(output,tags)
val_loss.update(loss2.item())
is_best=(val_loss.avg<best_loss)
best_loss=val_loss.avg if is_best else best_loss
if is_best:
state={
'epoch':epoch,
'state_dict':self.model.state_dict(),
'best_loss':best_loss
}
save_model(state,is_best,save_dir=self._model_path())
# best_loss_epoch.update(best_loss)#这里需要再测试一下
if epoch%10==0:
print("Epoch: ",epoch," Best loss: ",best_loss)
def test(self,data_path='',number=0,training=1,flag=0):
test_loader = DataLoader(self.test_data,batch_size=self.batch_size,shuffle=True)
# 调用模型
path1='./checkpoints/checkpoints'
model_name=self.model.__class__.__name__
model_path=os.path.join(path1,model_name,'best_model.pth')
best_model=torch.load(model_path)
self.model.load_state_dict(best_model['state_dict'])
self.model=self.model.to(self.device)
# # 测试
with torch.no_grad():# 验证精度
test_loss=AverageMeter()
self.model.eval()
for x,(data,tags) in enumerate(test_loader):
data=data.to(self.device)
tags=tags.to(self.device)
output=self.model(data)
loss=self.criterion(output,tags)
test_loss.update(loss.item())
print('test loss average value: ',test_loss.avg)