机器人制作开源方案 | 桌面级机械臂--本体说明+驱动及控制
一、本体说明
1. 机械臂整体描述
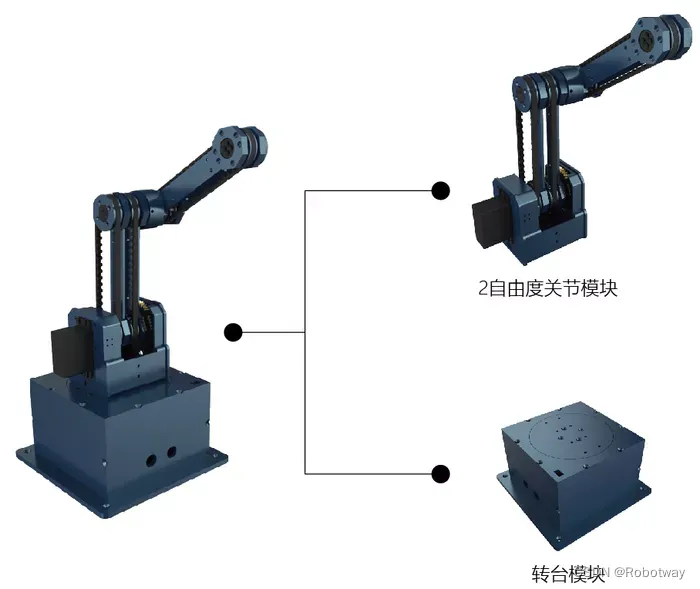
该桌面级机械臂为模块化设计,包含主机模块1个、转台模块1个、二级摆动模块1个、可编程示教盒1个、2种末端执行器、高清摄像头,以及适配器、组装工具、备用零件等。可将模块快速组合为一个带被动关节的串联3自由度机械臂,亦可进一步加装、更换执行器、传感器来完成各类控制实验。

1.1 机械臂清单介绍
| 序号 |
名称 |
备注 |
| 1 | 本体 |
包括转台、小臂、大臂、执行机构 |
| 2 | 执行机构 |
如:手爪执行器、气动执行器 |
| 3 | 主机 |
包括树莓派、Arduino 主控板等相关的配置 |
| 4 | 显示屏 |
|
| 5 | 电子部件 |
如:摄像头、遥控模块 |
 机械臂的主要配置清单
机械臂的主要配置清单
1.2 产品配置
机械臂的主要硬件图如下所示:
 主要硬件图
主要硬件图
组成的主要硬件参数如下表所示:

2. 机械臂结构说明
该机械臂结构是一个带被动关节的3自由度,包含一个1自由度的转台和带被动关节的2自由度关节。
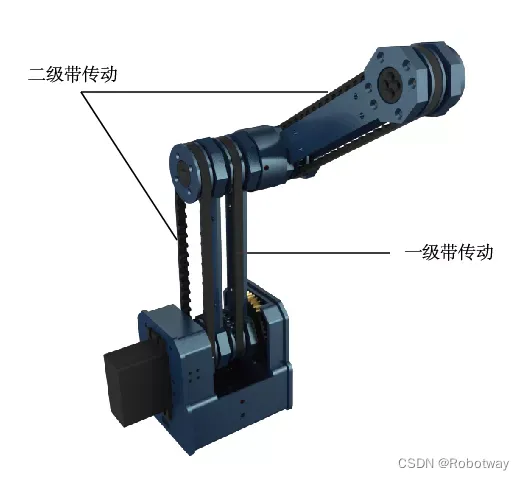
其中2自由度关节模块分为大臂和小臂:大臂通过1.76减速比的齿轮箱进行传动,小臂通过二级带传动实现传动和被动关节设计。被动关节可以保证执行器末端运动时指向保持一个方向,其中一级带传动控制小臂转动,另一级带传动使末端方向保持一致。
如下所示是装有手爪、摄像头的实物图:
 装有手爪和摄像头的实物图
装有手爪和摄像头的实物图
其中的执行机构部分(即现在装手爪执行器的地方)还可以灵活的替换为气动部件(见下图)。
 装有气动部件的实物图
装有气动部件的实物图
3. 机械臂的电路连接
在进行电路连接前,先来了解一下主机的布局及引脚图。下图是主机的布局实物图,本实验中主要用到总线、PWM(D4)、TX2/RX2。
 主机正面图
主机正面图
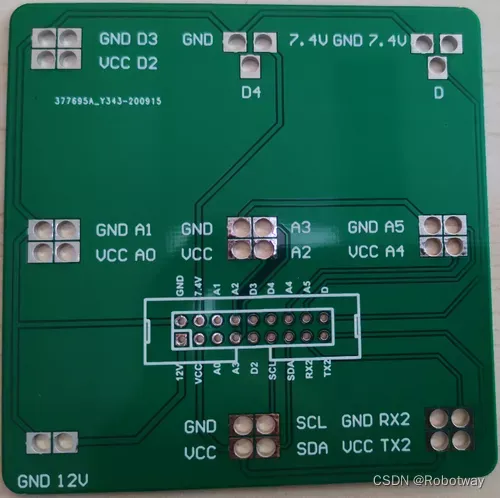 主机电路引脚图(从右向左与主机对应)
主机电路引脚图(从右向左与主机对应)
按下图所示进行机械臂的电路连接:
 机械臂与主机外设的接线图
机械臂与主机外设的接线图
 显示屏、鼠标、键盘与主机进行连接
显示屏、鼠标、键盘与主机进行连接
开机注意事项:
机械臂的状态主要包含非复位状态、复位状态(其中复位状态指的是:大臂转动到垂直状态、小臂转动到水平状态)。只有开机看到机械臂能够从非复位状态转到复位状态,后续实验才能正常进行;否则可能会出现烧录程序,但机械臂不按预期运动的现象。
 机械臂非复位状态
机械臂非复位状态
 机械臂的复位状态
机械臂的复位状态
4. 软硬件环境配置及使用
4.1软硬件环境介绍
机器人可利用视觉识别技术,进行识别、追踪目标、定位等功能。我们可以利用上位机来控制机器人的大脑,用下位机控制设备。
上位机是指:
人可以直接发出操控命令的计算机,一般是PC或者计算机的屏幕上显示各种信号变化(液压,水位,温度等),本实验将利用树莓派屏幕上显示视觉识别的结果。
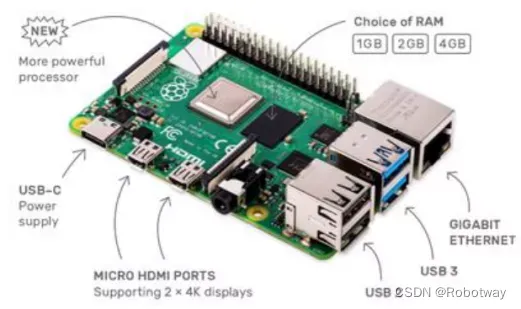
 树莓派及Ros系统
树莓派及Ros系统
下位机是指:
直接控制设备获取设备状况的的计算机,一般是PLC/单片机之类的,本实验将利用Arduino开源主控板充当下位机进行开发。

 Arduino主控板及编程IDE
Arduino主控板及编程IDE
上位机发出的命令首先传给下位机,下位机再根据此命令解释成相应时序信号,直接控制相应设备。下位机读取设备状态数据(一般模拟量),转化成数字信号反馈给上位机。选择合适的平台及编程环境、函数库,就可以进行机器人结构、运动控制、视觉开发等多方面的应用,控制机器人的行为。
4.2在树莓派上安装Ros及功能包
为了便于使用,本实验中已把树莓派和Arduino板子进行了组合,设计出主控盒子(又叫主机),方便使用。主控盒子已预装好操作系统、编程环境以及需要用到的功能包。
 主控盒子(主机)
主控盒子(主机)
对树莓派上的环境配置主要包括:安装Raspberry Pi OS (32-bit) with desktop操作系统、ROS、配置ROS环境、Arduino IDE、功能包。其中本实验需要的功能包包括视觉识别库(OpenCV2.4.9)、二维码识别库(zbar)。为了方便使用,本实验已做好了树莓派镜像文件,已经预安装好上述开发环境,电路连接好后可直接使用。当把主机与显示屏连接后,找到文末资料下载中的color_experiment_ws文件夹即可。
5. 资料下载
样机3D文件及程序源代码资料详见 桌面级机械臂-本体说明
二、驱动及控制
1. 总线舵机模式的设置
机械臂驱动采用总线式电机驱动,该总线式电机具有多种模式,如360°圆周模式、270°逆时针模式、270°顺时针模式等。总线舵机采用单总线通信方式,与传统舵机相比,最大特点就是舵机之间可串联,最多可级联255个舵机。
打开文末资料内的“总线舵机ID及模式更改资料”,为总线舵机设置模式,包括转台、大臂、小臂三部分,需要分别为总线舵机设置ID、工作模式。关于总线舵机ID设置如下图所示:
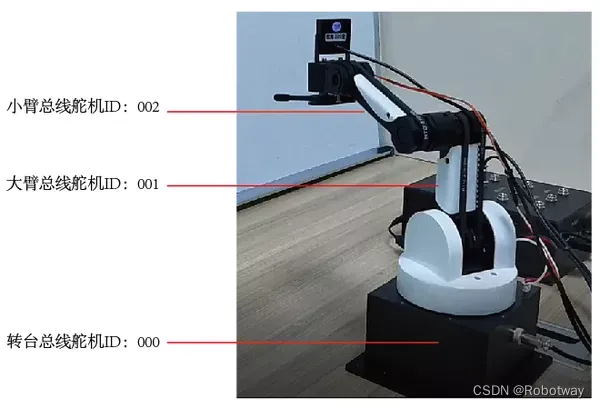 机械臂的各舵机ID图
机械臂的各舵机ID图
接下来开始为机械臂的各部分设置相应的舵机模式:
| 各部分 |
总线舵机ID |
计划设置舵机模式 |
代表含义 |
| 转台 |
000 |
#000PMOD2! |
舵机模式,角度最大范围270 度,方向逆时针 |
| 大臂 |
001 |
#001PMOD2! |
同上 |
| 小臂 |
002 |
#002PMOD2! |
同上 |
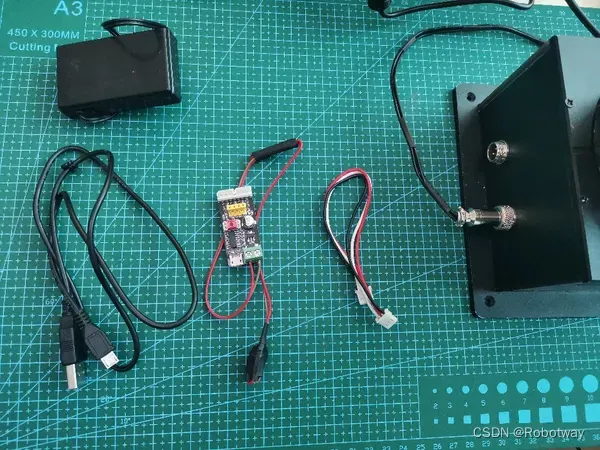
器材准备:PC机或笔记本电脑(windows操作系统、Arduino IDE)、以及下图所示的器材。
操作过程:分别为机械臂的转台、大臂、小臂设置舵机模式,并能设置其初始角度。
1.1设置转台的舵机模式
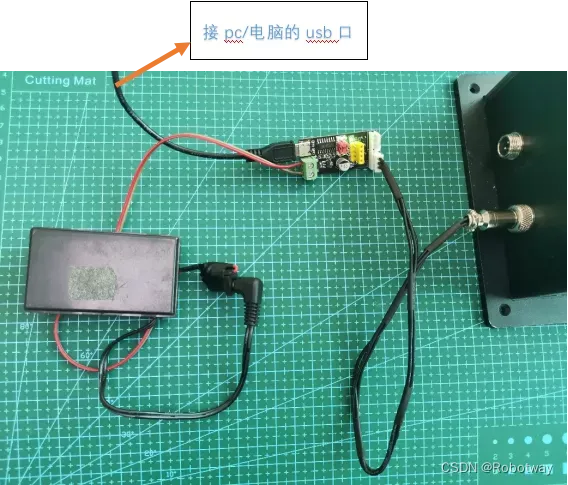
第一步:按下图所示连接电路。
第二步:打开文末资料内的”总线舵机ID及模式更改资料\串口调试助手\sscom5.13.1.exe”(如下图所示)。
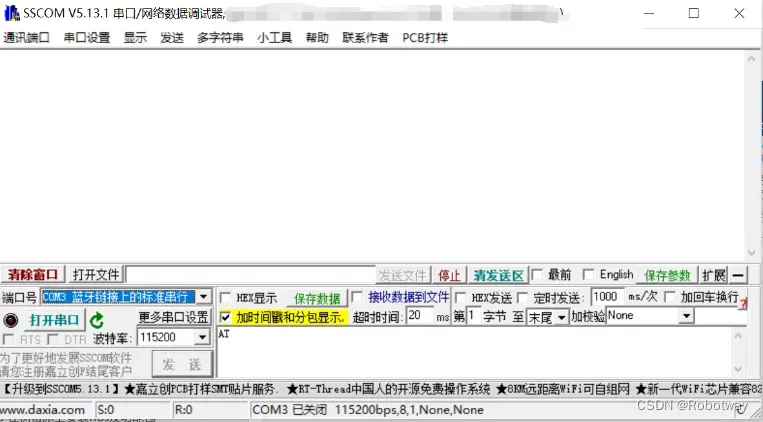
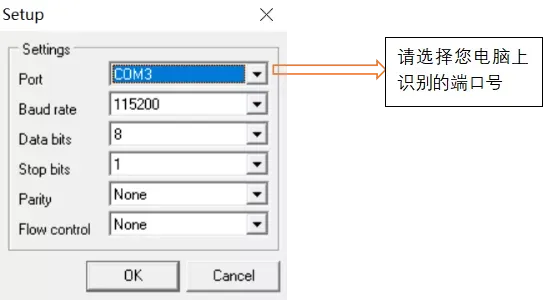
第三步:选择端口号、波特率,并打开串口。
先在菜单栏:串口设置-打开串口设置,选择端口号、波特率,点击“ok”即可。
接着点击“打开串口”,并点击“扩展”。

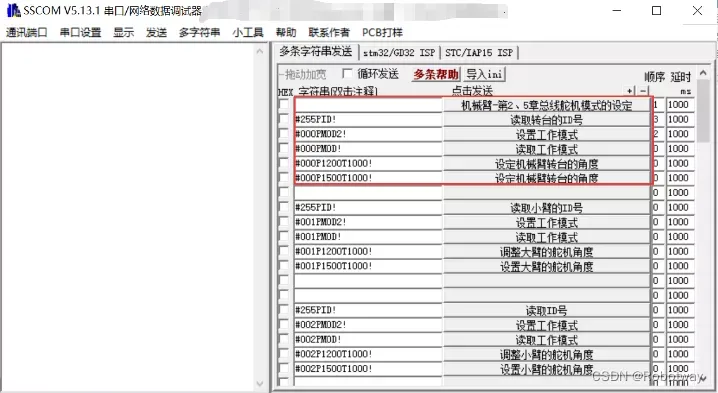
这里已经把命令设置好了,只需要依次点击描红的命令(如下图所示),就可以完成转台模式的设置,即可观察到转台转动到指定角度。
1.2 设置大臂的舵机模式
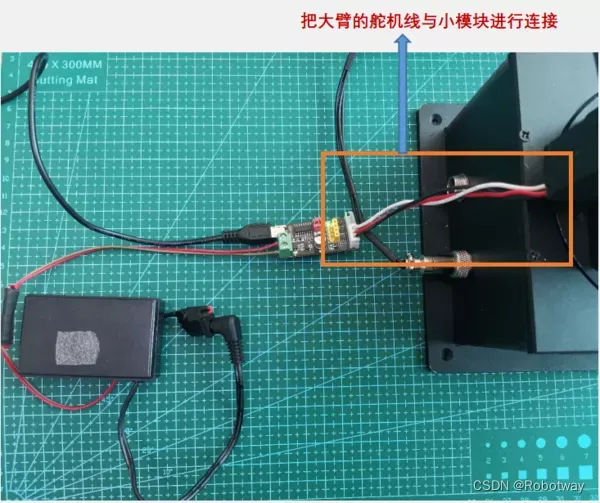
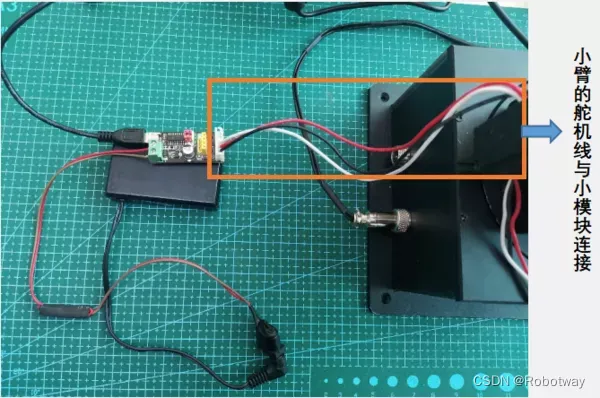
第一步:按下图所示把大臂的舵机线与小模块进行电路连接(注意:请先把小模块断电)。
第二步:在串口调试助手里,选择端口号、波特率并打开串口。
第三步:依次点击下边描红的命令,就可完成大臂模式的设置,同时可观察到大臂转动。

1.3设置小臂的舵机模式
第一步:按下图所示把小臂的舵机线与小模块进行电路连接(注意:请先把小模块断电)。
第二步:在串口调试助手里,选择端口号、波特率并打开串口。
第三步:依次点击下边描红的命令,就可完成小臂模式的设置,同时可观察到小臂转动。

这样就完成了总线舵机模式的设置工作,接下来的实验都是基于这种舵机模式来完成的。
2. 机械臂的单关节控制
实现思路:串口发送命令,控制单关节控制(提示:需要先设置好舵机模式)
器材准备:机械臂本体、主控盒、显示屏、键盘、鼠标(如下图所示)
 装有手爪和摄像头的实物图
装有手爪和摄像头的实物图
操作步骤:
① 下载文末资料内的参考程序color_experiment_ws\src\Contril_Single_Joint\arm_driver\arm_driver.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-02 https://www.robotway.com/
------------------------------*/
/*
-----------------------------------------------------------------------------------------------------------------
实验功能:实现单关节控制机械臂控制。
实验思路:通过串口发送命令,控制机械臂单关节控制。首先程序实现读取串口发送的数据,接着处理串口发送的数据,
最后程序将处理好的数据通过Serial1发送给机械臂达到控制机械臂的效果。
注意:串口发送命令格式为[机械臂部件pwm](pwm范围是[500~2500])。
例如:rm 1500 底盘转到1500
um 1500 大臂转到1500
lm 1500 小臂转到1500
实验接线:(主要接线)
机械臂通信口-------------(机械臂)电控箱
机械爪(舵机)---------------(执行器)电控箱
其他线路按照教材图片连接。
Created 2020.7.16 By:Boris.yuan
-----------------------------------------------------------------------------------------------------------------
*/
#include
#define CTL_BAUDRATE 115200 //总线舵机波特率
#define SERIAL_PRINTLN Serial1
#define SerialBaudrate 115200
#define RM "rm"
#define UM "um"
#define LM "lm"
String receive_string = "";
int catch_red_numbers=0;
int catch_blue_numbers=0;
int current_angle=0;
void setup() {
// put your setup code here, to run once:
delay(1100);
Serial.begin(SerialBaudrate);
SERIAL_PRINTLN.begin(CTL_BAUDRATE);
Bus_servo_angle_init();delay(2000);
Serial.println("Please input your commond......");
}
void loop() {
while(Serial.available()>0)
{
String commond = "";
long n_step = 0;
int index = 0;
commond = Serial.readStringUntil('\n');
index = commond.indexOf(' ');
n_step = commond.substring(index+1).toInt();
commond = commond.substring(0,index);
Serial.print(commond);Serial.print('\t');
Serial.println(n_step);
if(commond==RM){
if( (n_step<500) || (n_step>2500) ){
Serial.println("Sorry,the angle is out of range!");
}
else{
ArmSingleServoTo(0,n_step);
}
n_step=0;commond="";
}
if(commond==UM){
if( (n_step<500) || (n_step>2500) ){
Serial.println("Sorry,the angle is out of range!");
}
else{
ArmSingleServoTo(1,n_step);
}
n_step=0;commond="";
}
if(commond==LM){
if( (n_step<500) || (n_step>2500) ){
Serial.println("Sorry,the angle is out of range!");
}
else{
ArmSingleServoTo(2,n_step);
}
n_step=0;commond="";
}
Serial.println();
Serial.println("------------------------------------");
}
} ② 打开串口,查看返回的结果值。
注意:串口发送命令格式为[部件 pwm](pwm范围是[500~2500])。
| 串口发送命令例子 |
代表含义 |
| rm 1500 | 底盘转到1500 |
| um 1500 |
大臂转到1500 |
| lm 1500 |
小臂转到1500 |
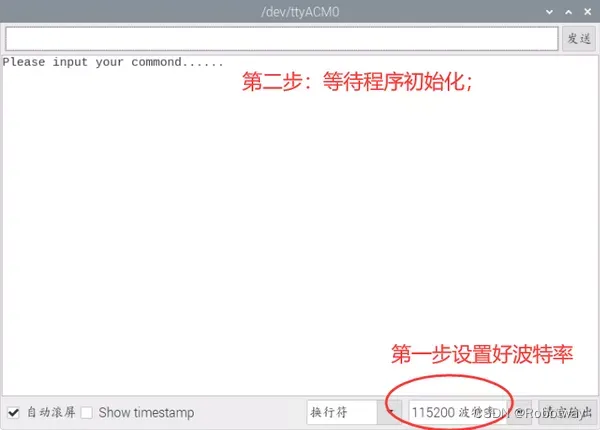
首先,设置波特率并等待程序初始化,界面如下图所示:
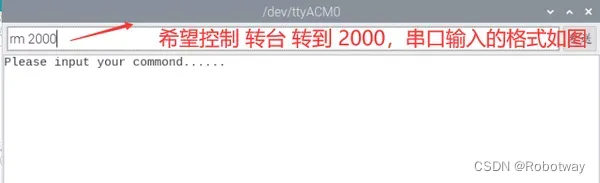
接下来,可以发送控制转台运动的例子,来观看结果。
输入格式如下图所示,就可以看见机械臂的转台运动:
同时也可看见串口显示数据。
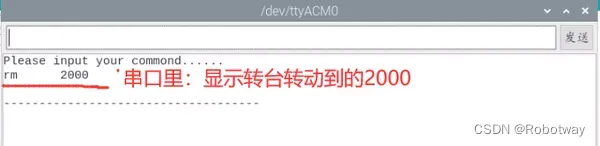
下面是本实验中分别针对转台、大臂、小臂转动位置进行测试的结果(如下图所示)。

3. 操作杆方案
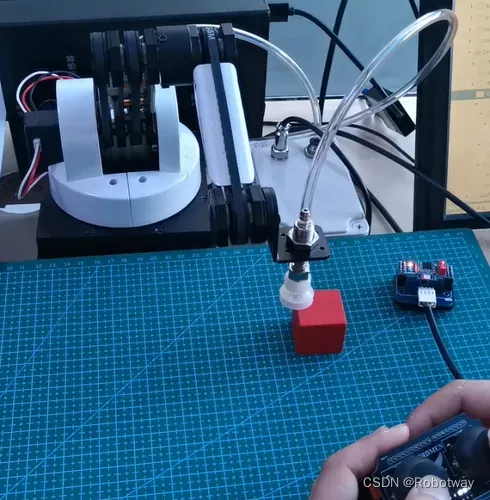
实现思路:通过操作杆控制气动盒的开、关; 当气动盒打开后,实现可以吸物块的功能。
实验器材及接线:如下图所示。

操作步骤:
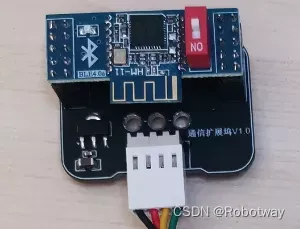
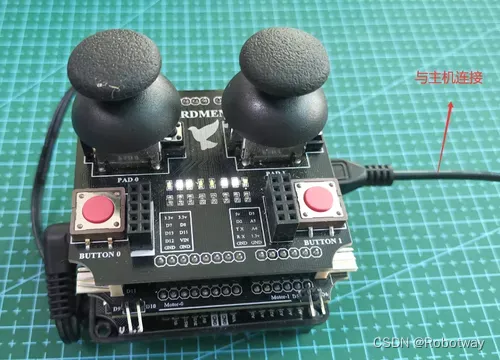
第一步:将 Basra主控板 、Bigfish扩展板 与 Birdmen手柄扩展板 堆叠在一起。

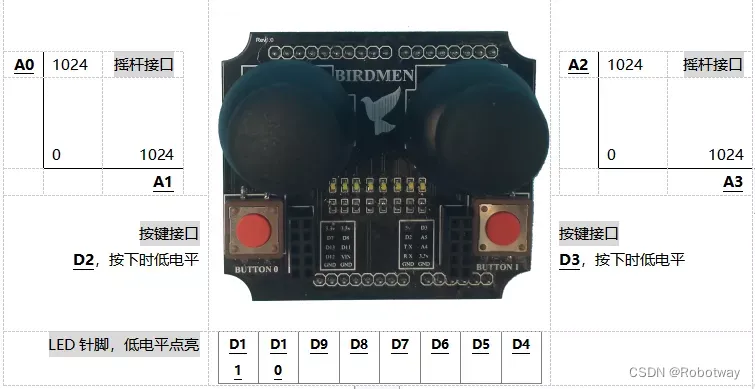
Birdmen手柄扩展板引脚图如下图所示:
第二步:下载文末资料内的参考程序color_experiment_ws\src\Rocker_Control_Sucker\rocker_contril_sucker\rocker_contril_sucker.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-03 https://www.robotway.com/
------------------------------*/
/*
实验功能:摇杆模块控制吸盘开关。
实验思路:读取摇杆模块数值,判断该数据,进而根据数据选取区间,编写不同区间,吸盘状态。
实验操作:将该例程下载到arduino开发版,按照实验教程接线,完成后,给模块上电,试着
滑动摇杆模块,控制吸盘开关状态。
实验接线:气动箱信号脚连接到Barsa的D12引脚
Create 2020.7.17 By:Boris.yuan
*/
#define Sucker_Pin 12
#define Rocker_Pin A1
void setup() {
// put your setup code here, to run once:
delay(1000);
Serial.begin(9600);
pinMode(Sucker_Pin,OUTPUT);
pinMode(Rocker_Pin,INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
int receive_Rocker_data = analogRead(Rocker_Pin);
Serial.println(receive_Rocker_data);
if( (receive_Rocker_data<200) )
{
digitalWrite(Sucker_Pin,LOW);
}
else if( (receive_Rocker_data>800) )
{
digitalWrite(Sucker_Pin,HIGH);
}
delay(30);
}第三步:左侧的摇杆,当向右按下时,气动盒开关打开,可以吸取物品(如下图所示);当向左按下时,气动盒开关关闭。

4. 机械臂的无线遥控
本实验将通过 蓝牙 结合一个可编程示教器进行无线遥控的学习,包含蓝牙通信设定、无线控制。
4.1 两个蓝牙通信设定
实验目的:测试蓝牙主从模块数据发收。
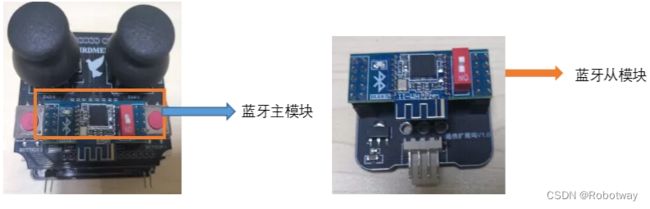
连接在Birdmen手柄扩展板上的蓝牙模块为主模块;连接在带开关通信扩展坞上的蓝牙模块为从模块。
实现思路:当蓝牙主模块发送数据(如123)时,蓝牙从模块能收到该数据(123),代表通信成功。
实验器材:如下图所示。
 蓝牙通信模块及配套线
蓝牙通信模块及配套线
操作步骤:
第一步:先给Basra主控板下载蓝牙主模块程序。
① 先按下图所示连接好电路(注意:蓝牙通信扩展坞的开关需拨到左侧)。

② 然后下载文末资料内的参考程序color_experiment_ws\src\Bluetooth_communication\Master\Master.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-03 https://www.robotway.com/
------------------------------*/
#define Baud 9600
#define SERIAL Serial2
void setup() {
// put your setup code here, to run once:
delay(1000);
Serial.begin(Baud);
SERIAL.begin(Baud);
}
void loop() {
// put your main code here, to run repeatedly:
while(SERIAL.available()>0)
{
String receive_string = SERIAL.readStringUntil('\n');
Serial.println(receive_string);
receive_string = " ";
}
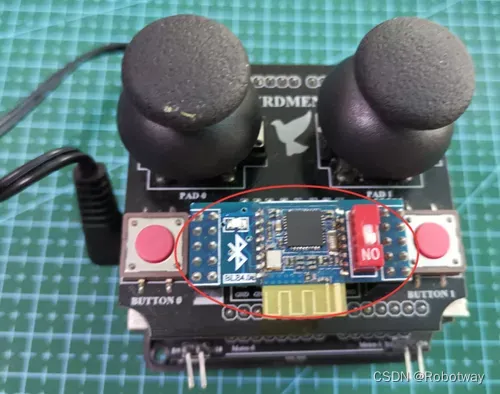
}③ 最后拔掉此主控板的USB线,将蓝牙主模块插在Bigfish扩展板的扩展坞上(如下图所示)。打开电源后,若看到蓝牙上的灯一闪一闪的,代表正在等待连接中。
第二步:给主机里的Arduino mega2560控制板下载蓝牙从模块程序。
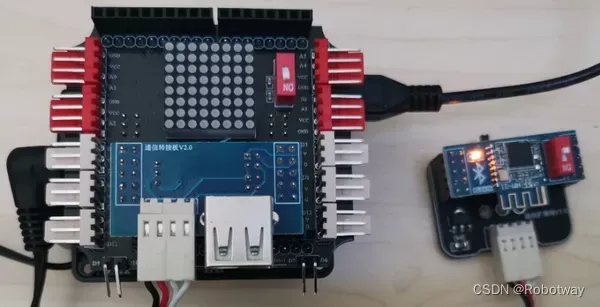
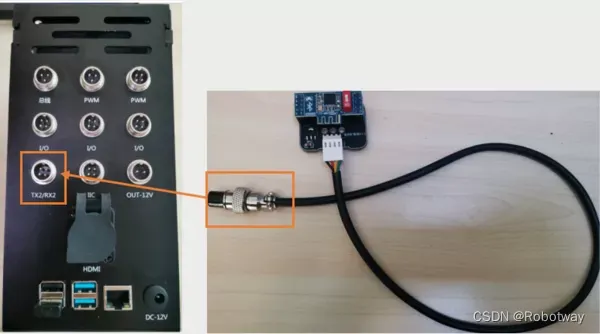
① 把蓝牙通信模块与主机的Tx2/RX2接口进行连接(如下图所示)。
② 然后下载文末资料内的参考程序color_experiment_ws\src\Bluetooth_communication\Salve\Salve.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-03 https://www.robotway.com/
------------------------------*/
#define Baud 9600
#define SERIAL Serial2
void setup() {
// put your setup code here, to run once:
delay(1000);
Serial.begin(Baud);
SERIAL.begin(Baud);
}
void loop() {
// put your main code here, to run repeatedly:
while(SERIAL.available()>0)
{
String receive_string = SERIAL.readStringUntil('\n');
Serial.println(receive_string);
receive_string = " ";
}
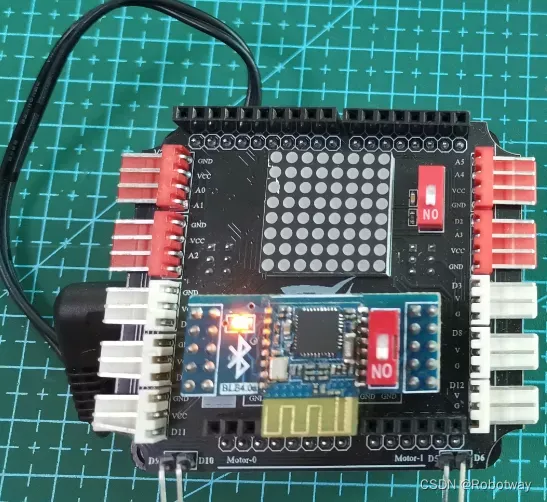
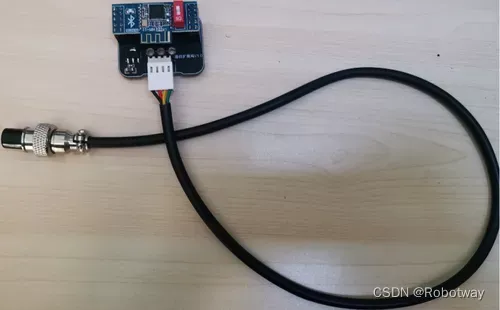
}③ 把蓝牙从模块连接在底座上(如下图所示),然后接在主机的TX2/RX2上,可以看见蓝牙从模块的灯亮,且一闪一闪的。
第三步:观察蓝牙主从模块灯,如果看到蓝牙主从模块上的灯亮着但不闪烁,则表示蓝牙主从模块连接成功。
第四步:打开蓝牙(从)模块的Arduino串口监视器,观察是否接受到数据“123”,如果接收到相应的数据(如下图所示),则表示蓝牙主从模块通信成功。

4.2 蓝牙遥控
实验目的:通过控制手柄上的两个摇杆,来实现机械臂气动搬运物块的功能。
实现思路:当按下手柄摇杆的不同方向时,可以控制机械臂的转台、大臂、小臂朝不同方向运动(默认规定手柄左边为左侧摇杆,右边为右侧摇杆)

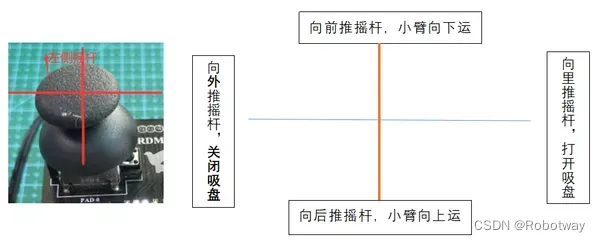
当左侧摇杆按下后,控制的吸盘、小臂的情况如下图所示:
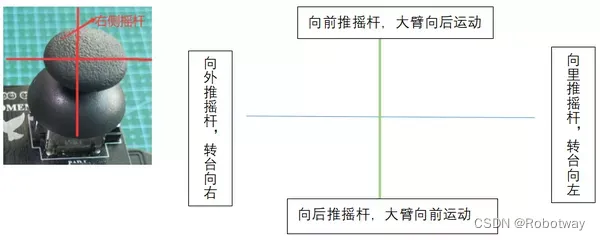
当右侧摇杆按下后,控制的转台、大臂的情况如下图所示:
实验器材:BLE4.0蓝牙模块 ×2、连接线、Basra控制板×1、与蓝牙连接的底座、机械臂本体、气动盒、连接线、主机、显示屏、鼠标、键盘
操作步骤:
第一步:先给带有摇杆模块的主控板(接蓝牙主模块)下载程序。
① 按下图所示连接电路:
② 然后下载文末资料内的参考程序color_experiment_ws\src\Wireness_Contril\Program_With_Rocker\controller\controller.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-03 https://www.robotway.com/
------------------------------*/
void setup() {
// put your setup code here, to run once:
Serial.begin(9600); //蓝牙串口波特率
pinMode(A0, INPUT); //左侧上下摇杆引脚
pinMode(A1, INPUT); //左侧上下摇杆引脚
pinMode(A2, INPUT); //右侧上下摇杆引脚
pinMode(A3, INPUT); //右侧上下摇杆引脚
}
void loop() {
// put your main code here, to run repeatedly:
if(analogRead(A0) > 1000)
{
Serial.print('u');
}
if(analogRead(A0) < 25)
{
Serial.print('d');
}
if(analogRead(A1) > 1000)
{
Serial.print('c');
}
if(analogRead(A1) < 25)
{
Serial.print('s');
}
if(analogRead(A2) > 1000)
{
Serial.print('f');
}
if(analogRead(A2) < 25)
{
Serial.print('b');
}
if(analogRead(A3) > 1000)
{
Serial.print('r');
}
if(analogRead(A3) < 25)
{
Serial.print('l');
}
delay(10);//发送执行周期20ms,可更改,越小机械臂运动越快,但是可能导致机械臂卡顿
}③ 将蓝牙主模块按下图所示插在手柄的扩展坞上。
第二步:给主机里的Arduino mega2560控制板(与蓝牙从模块连接)下载程序。
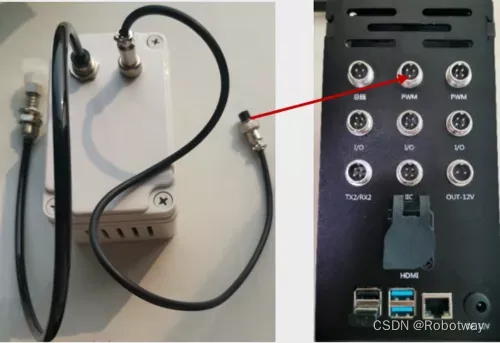
① 先把蓝牙从模块连接在扩展底座上;并把另一端与主机的TX2/RX2进行连接。
再把气动盒的三芯线与主机的PWM进行连接(如下图所示)。
② 然后下载文末资料内的参考程序color_experiment_ws\src\Wireness_Contril\Program_With_Chassis\Black_Handle_Robot_Arm_New\Black_Handle_Robot_Arm_New.ino:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-08-03 https://www.robotway.com/
------------------------------*/
//#include
#include
#include
//#define mySerial Serial2 //总线舵机串口,TX2,GND,5V
//#define mySerial2 Serial1 //蓝牙遥控串口TX1,RX1,GND,3.3V
#define CTL_BAUDRATE 115200 //总线舵机波特率
#define NOZZLE_PIN 4 //气动引脚,注意气动供电6v
#define INIT_X 1 //假设大臂长度单位为1
#define INIT_Y 1 //小臂长度与大臂长一致单位为1
#define INIT_R 1500 //底座总线舵机中间位置波特率为1500
#define DX 0.01 //每次X方向长的移动距离单位
#define DY 0.01 //每次Y方向臂长的移动距离单位
#define DR 5 //每次底座转动的单位
//SoftwareSerial mySerial(51, 4);
//SoftwareSerial mySerial2(10, 11);
#define mySerial2 Serial2
#define mySerial Serial1
float cur_x = INIT_X, cur_y = INIT_Y;
int cur_r = INIT_R;
int alphaToUpwm(float alpha)
{
return 2732.0-(alpha/M_PI)*2464;
/*大臂转动角度的计算公式。2464是大臂摆动180°总线舵机计算后的pwm长度。
大臂的减速比是44/25=1.76,测试的motor转动180°需要的pwm长度是1400,1.76×1400=2464;
2732是转动90°之后竖直向上对应的实际pwm值,2732=(2464/2)+1500,其中1500是大臂初始化竖直状态是电机的PWM值*/
}
int betaToLpwm(float beta)
{
return 1500 + (beta/M_PI)*1400; //小臂无减速比,由总线舵机直接驱动,小臂转动角度的计算公式,1400是小臂摆动180°总线舵机需要的PWM长度,1500是小臂保持水平状态的舵机PWM值
}
int armMoveTo(float x, float y)
{
float alpha, beta;
if (!cartesianToAlphaBeta(x, y, alpha, beta))
{
armServoTo(alphaToUpwm(alpha),betaToLpwm(beta));
return 0;
}
return 1;
}
void setup() {
// put your setup code here, to run once:
mySerial.begin(CTL_BAUDRATE);
pinMode(NOZZLE_PIN, OUTPUT); //气动引脚定义
mySerial2.begin(9600); //蓝牙串口波特率设置
nozzle_off(); //初始化气动关闭
delay(1000);
Serial.begin(9600);
armMoveTo(cur_x, cur_y); //初始化机械臂大臂小臂位置
cur_r = rotServoTo(cur_r); //初始化机械臂底座位置
}
void loop() {
// Serial.print(Serial1.parseInt());
// put your main code here, to run repeatedly:
if (mySerial2.available())
{
char c = mySerial2.read();
float tx, ty;
switch(c)
{
case 'u': // up
ty = cur_y + DY;
if (armMoveTo(cur_x, ty) == 0) // success
{
cur_y = ty;
}
break;
case 'd': // down
ty = cur_y - DY;
if (armMoveTo(cur_x, ty) == 0) // success
{
cur_y = ty;
}
break;
case 'f': // forward
tx = cur_x + DX;
if (armMoveTo(tx, cur_y) == 0) // success
{
cur_x = tx;
}
break;
case 'b': // backward
tx = cur_x - DX;
if (armMoveTo(tx, cur_y) == 0) // success
{
cur_x = tx;
}
break;
case 'l': // left
cur_r = rotServoTo(cur_r - DR);
break;
case 'r': // right
cur_r = rotServoTo(cur_r + DR);
break;
case 'c': // catch
//Serial.println('c');
nozzle_on();
break;
case 's': // release
//Serial.println('s');
nozzle_off();
break;
}
}
} 第三步:通过控制手柄上的两个摇杆,来实现机械臂气动搬运物块的功能。
程序源代码及总线舵机ID及模式更改资料详见 桌面级机械臂-驱动及控制