ubuntu20.04+ROS noetic在线运行单USB双目ORB_SLAM
双目摄像头主要有以下几种,各有优缺点。
- 1.单USB插口,左右图像单独输出
- 2.双USB插口,左右图像单独输出(可能存在同步性问题)
- 3.双USB插口,左右图像合成输出
- 4.单USB插口,左右图像合成输出
官方版本的ORB SLAM2编译运行参考之前记录的博客
虽然在ubuntu22.04上编译和运行的,但我后来在ubuntu20.04上编译和运行,报错也都差不多,主要是OpenCV的版本问题,由于需要使用ROS在线运行,不建议使用OpenCV3,直接先安装ROS noetic,其自带OpenCV4.2.0版本,可不用自己再编译安装。
一、相机话题拆分
我的双目相机是单USB合成图像,然而ORM SLAM2双目ROS在订阅相机话题时,订阅的是左右图像两个节点,因此需要对USB相机话题进行拆封。
参考:
1. ROS调用USB双目摄像头模组
2. ROS&OpenCV下单目和双目摄像头的标定与使用
1. ROS调用自己的双目USB相机
安装usb_cam包
sudo apt install ros-noetic-usb-cam*
查看摄像头占用usb串口号(插上USB查看一次,拔掉USB再查看一次,可确定串口号)
ls /dev/video*
启动launch文件
cd /opt/ros/noetic/share/usb_cam/launch/
sudo gedit usb_cam-test.launch
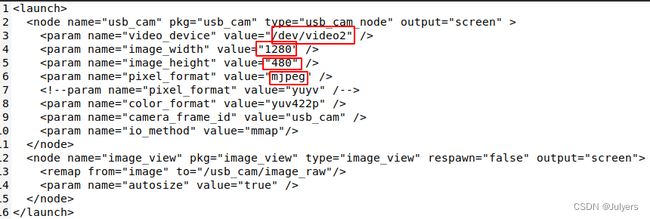
修改如上红框几个地方,主要有usb串口号、摄像头分辨率,以及摄像头的像素格式。默认分辨率是640x480,默认像素格式是yuyv,如果不修改的的话可能显示是花的,根据自己的相机修改即可。另外,同一个串口在关机重启后可能会发生变化,如果不显示,查询以后更改即可。
打开双目摄像头
roslaunch usb_cam usb_cam-test.launch

查看topic
rostopic list

相机只有一个/usb_cam/image_raw的话题
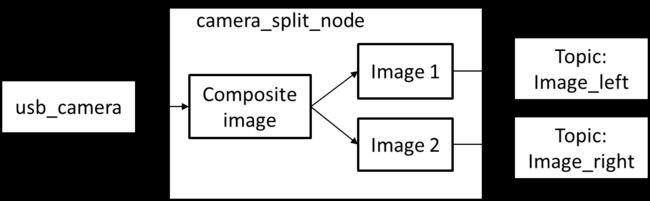
2. 分割双目相机图像,拆分rostopic
主要思路就是首先启动usb相机,然后新建camera_split节点,该节点订阅usb_cam/image_raw,然后分割双目相机图像,发布左图像和右图像两个节点。
创建工作空间并初始化(个人习惯放在Documents文件夹下)
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make
进入src创建ROS包并添加依赖
cd src
catkin_create_pkg camera_split cv_bridge image_transport roscpp sensor_msgs std_msgs camera_info_manager
修改camera_split包的CMakeLists.txt文件,修改include_directories
find_package(OpenCV 4.2.0 REQUIRED)
#修改include_directories:
include_directories (
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
#添加可执行文件
add_executable(camera_split_node src/camera_split.cpp )
#指定链接库
target_link_libraries(camera_split_node
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
)
创建源代码文件camera_split.cpp
#include
#include
#include
#include
#include
#include
#include
//#include
//#include
using namespace std;
class CameraSplitter
{
public:
CameraSplitter():nh_("~"),it_(nh_)
{
image_sub_ = it_.subscribe("/usb_cam/image_raw", 1, &CameraSplitter::imageCallback, this);
image_pub_left_ = it_.advertiseCamera("/left_cam/image_raw", 1);
image_pub_right_ = it_.advertiseCamera("/right_cam/image_raw", 1);
cinfo_ =boost::shared_ptr(new camera_info_manager::CameraInfoManager(nh_));
//读取参数服务器参数,得到左右相机参数文件的位置
string left_cal_file = nh_.param("left_cam_file", "");
string right_cal_file = nh_.param("right_cam_file", "");
if(!left_cal_file.empty())
{
if(cinfo_->validateURL(left_cal_file)) {
cout<<"Load left camera info file: "<loadCameraInfo(left_cal_file);
ci_left_ = sensor_msgs::CameraInfoPtr(new sensor_msgs::CameraInfo(cinfo_->getCameraInfo()));
}
else {
cout<<"Can't load left camera info file: "<validateURL(right_cal_file)) {
cout<<"Load right camera info file: "<loadCameraInfo(right_cal_file);
ci_right_ = sensor_msgs::CameraInfoPtr(new sensor_msgs::CameraInfo(cinfo_->getCameraInfo()));
}
else {
cout<<"Can't load right camera info file: "<image(cv::Rect(0,0,cv_ptr->image.cols/2, cv_ptr->image.rows));
rightImgROI_=cv_ptr->image(cv::Rect(cv_ptr->image.cols/2,0, cv_ptr->image.cols/2, cv_ptr->image.rows ));
//创建两个CvImage, 用于存放原始图像的左右部分。CvImage创建时是对Mat进行引用的,不会进行数据拷贝
leftImgPtr_=cv_bridge::CvImagePtr(new cv_bridge::CvImage(cv_ptr->header, cv_ptr->encoding,leftImgROI_) );
rightImgPtr_=cv_bridge::CvImagePtr(new cv_bridge::CvImage(cv_ptr->header, cv_ptr->encoding,rightImgROI_) );
//发布到/left_cam/image_raw和/right_cam/image_raw
ci_left_->header = cv_ptr->header; //很重要,不然会提示不同步导致无法去畸变
ci_right_->header = cv_ptr->header;
sensor_msgs::ImagePtr leftPtr =leftImgPtr_->toImageMsg();
sensor_msgs::ImagePtr rightPtr =rightImgPtr_->toImageMsg();
leftPtr->header=msg->header; //很重要,不然输出的图象没有时间戳
rightPtr->header=msg->header;
image_pub_left_.publish(leftPtr,ci_left_);
image_pub_right_.publish(rightPtr,ci_right_);
}
private:
ros::NodeHandle nh_;
image_transport::ImageTransport it_;
image_transport::Subscriber image_sub_;
image_transport::CameraPublisher image_pub_left_;
image_transport::CameraPublisher image_pub_right_;
boost::shared_ptr cinfo_;
sensor_msgs::CameraInfoPtr ci_left_;
sensor_msgs::CameraInfoPtr ci_right_;
cv::Mat leftImgROI_;
cv::Mat rightImgROI_;
cv_bridge::CvImagePtr leftImgPtr_=NULL;
cv_bridge::CvImagePtr rightImgPtr_=NULL;
};
int main(int argc,char** argv)
{
ros::init(argc,argv, "camera_split");
CameraSplitter cameraSplitter;
ros::spin();
return 0;
}
创建launch文件
<launch>
<node pkg="camera_split" type="camera_split_node" name="camera_split_node" output="screen" />
<node pkg="image_view" type="image_view" name="image_view_left" respawn="false" output="screen">
<remap from="image" to="/left_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
<node pkg="image_view" type="image_view" name="image_view_right" respawn="false" output="screen">
<remap from="image" to="/right_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
运行(运行之前先启动usb_cam)
cd catkin_ws
catkin_make
source ./devel/setup.bash
roslaunch camera_split camera_split_no_calibration.launch
二、创建双目相机参数文件
1. 棋盘格图像获取
拆分左右相机图像,按空格键捕获
- main.cpp
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
using namespace cv;
//双目摄像头支持2560x720, 1280x480,640x240
#define FRAME_WIDTH 2560
#define FRAME_HEIGHT 960
const char* keys =
{
"{help h usage ? | | print this message}"
"{@video | | Video file, if not defined try to use webcamera}"
};
int main(int argc, char** argv)
{
CommandLineParser parser(argc, argv, keys);
parser.about("Video Capture");
if (parser.has("help"))
{
parser.printMessage();
return 0;
}
String videoFile = parser.get(0);
if (!parser.check())
{
parser.printErrors();
return 0;
}
VideoCapture cap;
if (videoFile != "")
{
cap.open(videoFile);
}
else
{
cap.open(0); //0-笔记本自带摄像头,1-外接usb双目摄像头
cap.set(CV_CAP_PROP_FRAME_WIDTH, FRAME_WIDTH); //设置捕获视频的宽度
cap.set(CV_CAP_PROP_FRAME_HEIGHT, FRAME_HEIGHT); //设置捕获视频的高度
}
if (!cap.isOpened())
{
cout << "摄像头打开失败!" << endl;
return -1;
}
Mat frame, frame_L, frame_R;
cap >> frame; //从相机捕获一帧
Mat grayImage;
double fScale = 1.;
Size dsize = Size(frame.cols*fScale, frame.rows*fScale);
Mat imagedst = Mat(dsize, CV_32S);
resize(frame, imagedst, dsize);
char key;
char image_left[200];
char image_right[200];
int cap_count = 0;
int count = 0;
int count1 = 0;
int count2 = 0;
namedWindow("图片1", 1);
namedWindow("图片2", 1);
while(1)
{
key = waitKey(50);
cap >> frame;
count++;
resize(frame, imagedst, dsize);
frame_L = imagedst(Rect(0, 0, FRAME_WIDTH/2, FRAME_HEIGHT));
namedWindow("Video_L", 1);
imshow("Video_L", frame_L);
frame_R = imagedst(Rect(FRAME_WIDTH/2, 0, FRAME_WIDTH/2, FRAME_HEIGHT));
namedWindow("Video_R", 1);
imshow("Video_R", frame_R);
if (key == 27)
break;
if (key == 32) //使用空格键拍照
//if (0 == (count % 100)) //每5秒定时拍照
{
snprintf(image_left, sizeof(image_left), "/home/juling/Documents/CLionProjects/binocular_calibration/images3/left/left%02d.jpg", ++count1);
imwrite(image_left, frame_L);
imshow("图片1", frame_L);
snprintf(image_right, sizeof(image_right), "/home/juling/Documents/CLionProjects/binocular_calibration/images3/right/right%02d.jpg", ++count2);
imwrite(image_right, frame_R);
imshow("图片2", frame_R);
}
}
cap.release();
return 0;
}
- CmakeLists.txt
cmake_minimum_required(VERSION 3.21)
project(binocular_calibration)
set(CMAKE_CXX_STANDARD 11)
find_package( OpenCV 3.4.12 REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
aux_source_directory(. DIR_SRCS)
#add_executable(demo ${DIR_SRCS})
add_executable(binocular_calibration main.cpp)
target_link_libraries( binocular_calibration ${OpenCV_LIBS} )
2. 双目标定
OpenCV标定
-
代码结构

-
stereo_calibration.py
# -*- coding: utf-8 -*-
import os.path
import numpy as np
import cv2
import glob
def draw_parallel_lines(limg, rimg):
HEIGHT = limg.shape[0]
WIDTH = limg.shape[1]
img = np.zeros((HEIGHT, WIDTH * 2 + 20, 3))
img[:, :WIDTH, :] = limg
img[:, -WIDTH:, :] = rimg
for i in range(int(HEIGHT / 32)):
img[i * 32, :, :] = 255
return img
# monocular camera calibration
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
objp = np.zeros((5 * 5, 3), np.float32)
objp[:, :2] = np.mgrid[0:5, 0:5].T.reshape(-1, 2)
objp = objp * 100 # 棋盘格方格100mm
objpoints = []
imgpoints1 = []
imgpoints2 = []
root_path ='./images2'
subfix = 'images2'
image_id = 12
# 20230828 Julyer
# 左相机imgpoints1与右相机imgpoints2的维度不一样导致报错
left_imgs = glob.glob(root_path + '/left/*.jpg')
right_imgs = glob.glob(root_path + '/right/*.jpg')
for name in left_imgs:
img_id = name.split('left')[-1]
left_img = cv2.imread(name)
right_img = cv2.imread(root_path + '/right/right' + img_id)
gray1 = cv2.cvtColor(left_img, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(right_img, cv2.COLOR_BGR2GRAY)
ret1, corners1 = cv2.findChessboardCorners(gray1, (5, 5), cv2.CALIB_CB_ADAPTIVE_THRESH | cv2.CALIB_CB_FILTER_QUADS)
ret2, corners2 = cv2.findChessboardCorners(gray2, (5, 5), cv2.CALIB_CB_ADAPTIVE_THRESH | cv2.CALIB_CB_FILTER_QUADS)
if ret1 and ret2:
objpoints.append(objp)
corners11 = cv2.cornerSubPix(gray1, corners1, (11, 11), (-1, -1), criteria)
corners22 = cv2.cornerSubPix(gray2, corners2, (11, 11), (-1, -1), criteria)
imgpoints1.append(corners11)
imgpoints2.append(corners22)
# img1 = cv2.drawChessboardCorners(left_img, (5, 5), corners11, ret1)
# img2 = cv2.drawChessboardCorners(right_img, (5, 5), corners22, ret2)
# cv2.imshow('left corners', img1)
# cv2.imshow('right corners', img2)
# cv2.waitKey(1)
elif not ret1:
print('left' + img_id + ' couldn\'t be found')
elif not ret2:
print('right' + img_id + ' couldn\'t be found')
ret_l, mtx_l, dist_l, rvecs_l, tvecs_l = cv2.calibrateCamera(objpoints, imgpoints1, gray1.shape[::-1], None, None)
ret_r, mtx_r, dist_r, rvecs_r, tvecs_r = cv2.calibrateCamera(objpoints, imgpoints2, gray2.shape[::-1], None, None)
print('left ret: ', ret_l)
print('right ret: ', ret_r)
# binocular camera calibration
ret, mtx_l, dist_l, mtx_r, dist_r, R, T, E, F = cv2.stereoCalibrate(objpoints, imgpoints1, imgpoints2, mtx_l, dist_l,
mtx_r, dist_r, gray1.shape[::-1])
np.savez("./parameters for calibration_" + subfix + ".npz", ret=ret, mtx_l=mtx_l, mtx_r=mtx_r, dist_l=dist_l, dist_r=dist_r, R=R, T=T, E=E, F=F)
np.savez("./points_" + subfix + ".npz", objpoints=objpoints, imgpoints1=imgpoints1, imgpoints2=imgpoints2)
print('\nintrinsic matrix of left camera=', mtx_l)
print('\nintrinsic matrix of right camera=', mtx_r)
print('\ndistortion coefficients of left camera=', dist_l)
print('\ndistortion coefficients of right camera=', dist_r)
print('\nTransformation from left camera to right:')
print('\nR=', R)
print('\nT=', T)
print('\nReprojection Error=', ret)
# stereo rectification
R1, R2, P1, P2, Q, ROI1, ROI2 = cv2.stereoRectify(mtx_l, dist_l, mtx_r, dist_r, gray1.shape[::-1], R, T, flags=0, alpha=-1)
# undistort rectifying mapping
map1_l, map2_l = cv2.initUndistortRectifyMap(mtx_l, dist_l, R1, P1, gray1.shape[::-1], cv2.CV_16SC2) # cv2.CV_32FC1
map1_r, map2_r = cv2.initUndistortRectifyMap(mtx_r, dist_r, R2, P2, gray2.shape[::-1], cv2.CV_16SC2)
print('\nmap1_r size', np.shape(map1_r))
print('\nmap2_r size', np.shape(map2_r))
# undistort the original image, take img#12 as an example
left_id = cv2.imread(root_path + '/left/left' + str(image_id) + '.jpg')
right_id = cv2.imread(root_path + '/right/right' + str(image_id) + '.jpg')
dst_l = cv2.remap(left_id, map1_l, map2_l, cv2.INTER_LINEAR) # cv2.INTER_CUBIC
dst_r = cv2.remap(right_id, map1_r, map2_r, cv2.INTER_LINEAR)
cv2.imshow('map dst_r', dst_r)
cv2.waitKey(0)
print('\ndst_r size', np.shape(dst_r))
img_merge = draw_parallel_lines(dst_l, dst_r)
# cv2.imwrite('./rectify_results/left03(rectified).jpg', dst_l)
# cv2.imwrite('./rectify_results/right03(rectified).jpg', dst_r)
cv2.imwrite('rectify_results/rectify' + str(image_id) + '_' + subfix + '.jpg', img_merge)
print('\nrectification has been done successfully.')
np.savez("./rectify_results/parameters for rectification_" + subfix +".npz", R1=R1, R2=R2, P1=P1, P2=P2, Q=Q, ROI1=ROI1, ROI2=ROI2)
print('\nR1=', R1)
print('\nR2=', R2)
print('\nP1=', P1)
print('\nP2=', P2)
print('\nQ=', Q)
print('\nROI1=', ROI1)
print('\nROI2=', ROI2)
标定结果:
/usr/bin/python3.8 /home/juling/Documents/PycharmProjects/Stereo-master/rovmaker/stereo_calibration.py
left ret: 0.3898234269642049
right ret: 0.4078028378647591
intrinsic matrix of left camera= [[840.80247861 0. 667.37621909]
[ 0. 840.1220566 519.95457746]
[ 0. 0. 1. ]]
intrinsic matrix of right camera= [[838.1562009 0. 677.06068936]
[ 0. 836.94290586 500.83733639]
[ 0. 0. 1. ]]
distortion coefficients of left camera= [[-0.00459317 0.03249505 0.00071983 0.00213802 0.02668156]]
distortion coefficients of right camera= [[ 0.00872802 -0.01583376 -0.00164319 0.00104224 0.08360213]]
Transformation from left camera to right:
R= [[ 9.99981316e-01 4.00224781e-04 -6.09985120e-03]
[-3.85052048e-04 9.99996830e-01 2.48836542e-03]
[ 6.10082777e-03 -2.48597017e-03 9.99978300e-01]]
T= [[-57.64570079]
[ -0.7422294 ]
[ 0.41023682]]
Reprojection Error= 27.596230140236862
rectification has been done successfully.
R1= [[ 0.99982475 0.01329215 -0.01318275]
[-0.01327549 0.99991097 0.00135007]
[ 0.01319952 -0.00117483 0.99991219]]
R2= [[ 0.9998918 0.01287432 -0.00711575]
[-0.01288329 0.99991627 -0.0012167 ]
[ 0.00709949 0.00130824 0.99997394]]
P1= [[838.53248123 0. 684.23641968 0. ]
[ 0. 838.53248123 506.49901199 0. ]
[ 0. 0. 1. 0. ]]
P2= [[ 8.38532481e+02 0.00000000e+00 6.81501434e+02 -4.83430231e+04]
[ 0.00000000e+00 8.38532481e+02 5.06499012e+02 0.00000000e+00]
[ 0.00000000e+00 0.00000000e+00 1.00000000e+00 0.00000000e+00]]
Q= [[ 1.00000000e+00 0.00000000e+00 0.00000000e+00 -6.84236420e+02]
[ 0.00000000e+00 1.00000000e+00 0.00000000e+00 -5.06499012e+02]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 8.38532481e+02]
[ 0.00000000e+00 0.00000000e+00 1.73454705e-02 -4.74396078e-02]]
ROI1= (27, 13, 1221, 909)
ROI2= (31, 38, 1213, 903)
Process finished with exit code 0
3. 创建yaml参数文件
参考:https://blog.csdn.net/weixin_37918890/article/details/95626004
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
# Pr矩阵中的值(参考:https://blog.csdn.net/weixin_37918890/article/details/95626004)
Camera.fx: 8.38532481e+02
Camera.fy: 8.38532481e+02
Camera.cx: 6.81501434e+02
Camera.cy: 5.06499012e+02
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.width: 1280
Camera.height: 960
# Camera frames per second
Camera.fps: 20.0
# stereo baseline times fx
# Pr中的值,单位转为m,取绝对值
Camera.bf: 48.3430231
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Close/Far threshold. Baseline times.
ThDepth: 18
#--------------------------------------------------------------------------------------------
# Stereo Rectification. Only if you need to pre-rectify the images.
# Camera.fx, .fy, etc must be the same as in LEFT.P
#--------------------------------------------------------------------------------------------
LEFT.height: 960
LEFT.width: 1280
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data:[-0.00459317, 0.03249505, 0.00071983, 0.00213802, 0.02668156]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [840.80247861, 0., 667.37621909, 0.0, 840.1220566, 519.95457746, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 0.99982475, 0.01329215, -0.01318275, -0.01327549, 0.99991097, 0.00135007, 0.01319952, -0.00117483, 0.99991219]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [838.53248123, 0. , 684.23641968, 0. , 0. , 838.53248123, 506.49901199, 0. , 0. , 0. , 1. , 0.]
RIGHT.height: 960
RIGHT.width: 1280
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data:[0.00872802, -0.01583376, -0.00164319, 0.00104224, 0.08360213]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [838.1562009, 0., 677.06068936, 0.0, 836.94290586, 500.83733639, 0.0, 0.0, 1]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [0.9998918, 0.01287432, -0.00711575, -0.01288329, 0.99991627, -0.0012167, 0.00709949, 0.00130824, 0.99997394]
# -4.83430231e+04转为m单位,即-4.83430231e+01
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [8.38532481e+02, 0.00000000e+00, 6.81501434e+02, -4.83430231e+01, 0, 8.38532481e+02, 5.06499012e+02, 0, 0, 0, 1, 0]
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1200
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
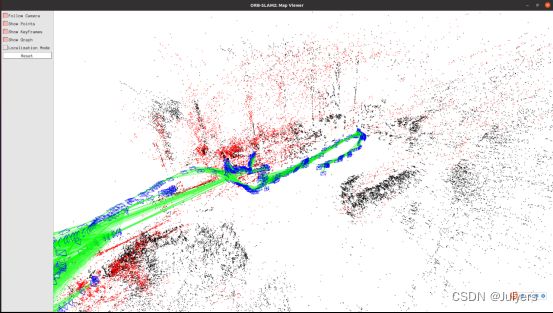
三、ROS在线运行ORB SLAM2建立稀疏地图
1. 修改订阅的相机话题为拆分后的话题
复制ros_stereo.cc为ros_stereo_rovmaker.cc,修改如下部分
ros::NodeHandle nh;
//message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/camera/left/image_raw", 1);
//message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "camera/right/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/left_cam/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "right_cam/image_raw", 1);
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::Image> sync_pol;
message_filters::Synchronizer<sync_pol> sync(sync_pol(10), left_sub,right_sub);
sync.registerCallback(boost::bind(&ImageGrabber::GrabStereo,&igb,_1,_2));
2. 重新编译
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/juling/Documents/projects/ORB_SLAM2_binocular
chmod +x build_ros.sh
./build_ros.sh
3. 运行
rosrun ORB_SLAM2 StereoRovmaker Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/rovmaker.yaml true
四、OpenCV在线运行ORB SLAM2建立稀疏地图
参考:十里桃园的博客
由于是单usb合成图像输出,这里修改了一下代码,输出左右帧。复制Example/Stereo/stereo_euroc.cc,修改为如下代码。
- stereo_euroc_slty.cc
/**
* This file is part of ORB-SLAM2.
*
* Copyright (C) 2014-2016 Raúl Mur-Artal (University of Zaragoza)
* For more information see
*
* ORB-SLAM2 is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* ORB-SLAM2 is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with ORB-SLAM2. If not, see
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std::chrono;
using namespace std;
using namespace cv;
#define FRAME_WIDTH 2560
#define FRAME_HEIGHT 960
int main(int argc, char **argv)
{
// Retrieve paths to images
vector vstrImageLeft;
vector vstrImageRight;
vector vTimeStamp;
//LoadImages(string(argv[3]), string(argv[4]), string(argv[5]), vstrImageLeft, vstrImageRight, vTimeStamp);
//if(vstrImageLeft.empty() || vstrImageRight.empty())
// {
// cerr << "ERROR: No images in provided path." << endl;
// return 1;
//}
// if(vstrImageLeft.size()!=vstrImageRight.size())
// {
// cerr << "ERROR: Different number of left and right images." << endl;
// return 1;
// }
// Read rectification parameters
cv::FileStorage fsSettings(argv[2], cv::FileStorage::READ);
if(!fsSettings.isOpened())
{
cerr << "ERROR: Wrong path to settings" << endl;
return -1;
}
cv::Mat K_l, K_r, P_l, P_r, R_l, R_r, D_l, D_r;
fsSettings["LEFT.K"] >> K_l;
fsSettings["RIGHT.K"] >> K_r;
fsSettings["LEFT.P"] >> P_l;
fsSettings["RIGHT.P"] >> P_r;
fsSettings["LEFT.R"] >> R_l;
fsSettings["RIGHT.R"] >> R_r;
fsSettings["LEFT.D"] >> D_l;
fsSettings["RIGHT.D"] >> D_r;
int rows_l = fsSettings["LEFT.height"];
int cols_l = fsSettings["LEFT.width"];
int rows_r = fsSettings["RIGHT.height"];
int cols_r = fsSettings["RIGHT.width"];
if(K_l.empty() || K_r.empty() || P_l.empty() || P_r.empty() || R_l.empty() || R_r.empty() || D_l.empty() || D_r.empty() ||
rows_l==0 || rows_r==0 || cols_l==0 || cols_r==0)
{
cerr << "ERROR: Calibration parameters to rectify stereo are missing!" << endl;
return -1;
}
cv::Mat M1l,M2l,M1r,M2r;
cv::initUndistortRectifyMap(K_l,D_l,R_l,P_l.rowRange(0,3).colRange(0,3),cv::Size(cols_l,rows_l),CV_32F,M1l,M2l);
cv::initUndistortRectifyMap(K_r,D_r,R_r,P_r.rowRange(0,3).colRange(0,3),cv::Size(cols_r,rows_r),CV_32F,M1r,M2r);
// const int nImages = vstrImageLeft.size();
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::STEREO,true);
// Vector for tracking time statistics
vector vTimesTrack;
cout << endl << "-------" << endl;
cout << "Start processing camera ..." << endl;
cv::Mat imLeft, imRight, imLeftRect, imRightRect;
//***********************************************************************8
cv::VideoCapture cap(0, cv::CAP_V4L2);
if (!cap.isOpened())
{
cout << "摄像头打开失败!" << endl;
return -1;
}
else
{
cap.open(0, cv::CAP_V4L2); //0-笔记本自带摄像头,1-外接usb双目摄像头
cap.set(cv::CAP_PROP_FRAME_WIDTH, FRAME_WIDTH); //设置捕获视频的宽度
cap.set(cv::CAP_PROP_FRAME_HEIGHT, FRAME_HEIGHT); //设置捕获视频的高度
cap.set(cv::CAP_PROP_FPS, 30);
}
cv::Mat frame;
cap >> frame; //从相机捕获一帧
cv::Mat grayImage;
double fScale = 1.;
cv::Size dsize = cv::Size(frame.cols*fScale, frame.rows*fScale);
cv::Mat imagedst = cv::Mat(dsize, CV_32S);
//***********************************************************************8
long int nImages = 0;
int ni=0;
// Main loop
while(ni>-1)
{
cap >> frame;
cv::resize(frame, imagedst, dsize);
imLeft = imagedst(cv::Rect(0, 0, FRAME_WIDTH/2, FRAME_HEIGHT));
imRight = imagedst(cv::Rect(FRAME_WIDTH/2, 0, FRAME_WIDTH/2, FRAME_HEIGHT));
//***********************************************************************8
if(imLeft.empty())
{
cerr << endl << "Check Left Camera!! "<< endl;
return 1;
}
if(imRight.empty())
{
cerr << endl << "Check Right Camera!! "<< endl;
return 1;
}
cv::remap(imLeft,imLeftRect,M1l,M2l,cv::INTER_LINEAR);
cv::remap(imRight,imRightRect,M1r,M2r,cv::INTER_LINEAR);
time_point now = system_clock::now();
double tframe = now.time_since_epoch().count();
vTimeStamp.push_back(tframe);
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif
// Pass the images to the SLAM system
SLAM.TrackStereo(imLeftRect,imRightRect,tframe);
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif
double ttrack= std::chrono::duration_cast >(t2 - t1).count();
vTimesTrack.push_back(ttrack);
// Wait to load the next frame
/*
double T=0;
if(ni0)
T = tframe-vTimeStamp[ni-1];
if(ttrack - /ORB_SLAM2_binocular/CmakeLists.txt
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo)
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
add_executable(stereo_euroc
Examples/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc ${PROJECT_NAME})
# 增加下面几行
add_executable(stereo_euroc_slty
Examples/Stereo/stereo_euroc_slty.cc)
target_link_libraries(stereo_euroc_slty ${PROJECT_NAME})
重新编译
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/juling/Documents/projects/ORB_SLAM2_binocular
chmod +x build.sh
./build.sh
运行
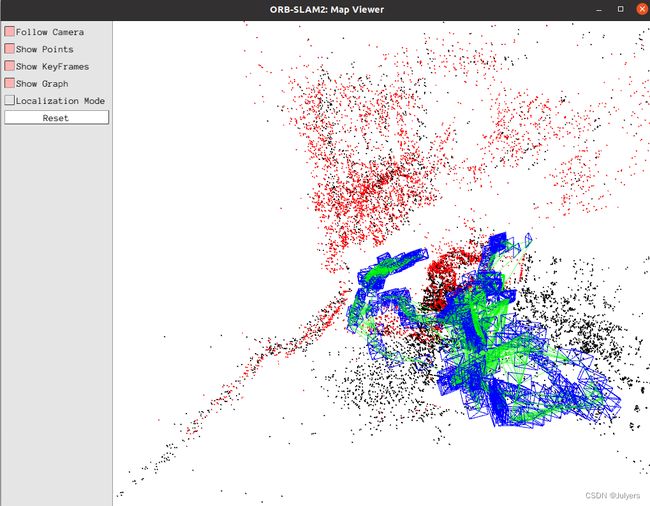
./Examples/Stereo/stereo_euroc_slty Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/rovmaker.yaml
yaml文件中的特征点数量ORBextractor.nFeatures从1200改成了2500,初始化的时候要慢一些,相机移动速度要平稳。
办公室稀疏建图结果: