手把手实现 | 使用Yolov8训练自己的数据集【环境配置-准备数据集(采集&标注&划分)-模型训练(多种方式)-模型预测-模型导出】
转眼间~ 目标检测经典模型Yolo的第八个版本就已经发布大半年了。在这篇文章中,笔者将一步一步详细实现使用Yolov8训练自己的数据集。具体步骤包含如下:
- 环境准备
- 准备数据集
- 数据采集
- 数据标注
- 数据拆分
- 配置文件
- 模型训练
- 模型预测
- 模型导出
环境准备
首先切换至指定目录,执行以下命令下载Yolov8项目代码。
git clone https://github.com/ultralytics/ultralytics
再切换至ultralytics,安装依赖包。
cd ultralytics
pip install -r requirements.txt
如果加快下载速度,可使用国内源,例如:
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
准备数据集
数据采集
数据采集是深度学习和人工智能任务中至关重要的一步,它为模型提供了必要的训练样本和测试数据。在实际应用中,数据采集的方法多种多样,每种方法都有其独特的优势和适用场景。本文将介绍常见的数据采集方法,包括使用开源已标记数据集、爬取数据集、自己拍摄数据集以及使用数据增强生成数据集等。
- 使用开源已标记数据集
使用开源数据集是一种常见且有效的数据采集方法。开源数据集通常已经过标记和验证,可大大节省数据采集和标注的时间和资源成本。例如ImageNet数据集,包含超过1400万张图像,可用于深度学习模型训练。此外,还有像Coco、DOTA数据集等,笔者在这里为大家整理了常见的深度学习开源数据集地址,具体如下,以供参考。
- coco数据集:https://cocodataset.org
- Pascal Voc数据集:https://pjreddie.com/projects/pascal-voc-dataset-mirror/
- Linkopings交通标志数据集:http://m6z.cn/68ldS0
- RMFD口罩遮挡人脸数据集:http://m6z.cn/61z9Fv
- 生活垃圾数据集:http://m6z.cn/6n5Adu
- 火焰和烟雾图像数据集:http://m6z.cn/6fzn0f
- MTFL人脸识别数据集:http://m6z.cn/6fHmaT
- 猫咪数据集:http://m6z.cn/5TAgbw
- 宠物图像数据集:http://m6z.cn/5TAgdC
- HMDB人类动作识别数据集:http://m6z.cn/6gGlzF
- KITTI道路数据集:http://m6z.cn/5xz4OW
- MPII人体模型数据集:http://m6z.cn/69aaIe
- 天池铝型材表面缺陷数据集:http://m6z.cn/61EksR
- 防护装备-头盔和背心检测:http://m6z.cn/61zarT
- 爬取网络数据集
爬取网络数据集是指通过网络爬虫技术从网页、社交媒体、论坛等网络资源中获取数据。这种方法不仅可以获取大量的数据,而且还可以根据需求定制所需数据的类型和规模。
然而值得注意的是,爬取网络数据集也面临一些挑战和限制。其中之一是合法性和道德性问题。在爬取网络数据集时,我们必须遵守法律法规和隐私保护原则,确保数据的合法获取和使用。此外,网络数据的质量和准确性也是需要考虑的问题。互联网上的数据可能存在错误、噪声和伪造信息,需要进行数据清洗和验证。
- 自己拍摄数据集
如果您的应用需要处理特定的场景和环境,那么通用的数据集可能无法涵盖所需数据,则需要自己拍摄数据集。例如,在无人驾驶领域,您可能需要收集和标注与您特定驾驶场景相关的图像和传感器数据,以训练自动驾驶模型。

- 使用数据增强生成数据集
当数据集相对较小或不足以训练出具有良好性能的模型时,我们可以使用数据增强扩充数据集的规模。以下是一些常见的数据增强技术,可以用于生成数据集:
- 旋转
- 翻转
- 缩放
- 裁剪
- …
笔者在这里使用的是安全帽佩戴数据集。
标注数据集
什么是数据标注?
数据标注是通过人工把需要识别和分辨的数据贴上标签。深度神经网络学习这些标注数据的特征,最终实现自主识别的功能。
常用的标注工具有labelImg、LabelMe等,但是这些图像标注软件安装和打开都比较麻烦。笔者在这里选用了一款在线标注数据集的工具Make Sense。
标注通用规则
- 贴边规则:标注框需紧贴目标物体的边缘进行画框标注,不可框小或框大。
- 重叠规则:当两个目标物体有重叠的时候,只要不是遮挡超过一半的就可以框的(遮挡范围需要根据算法识别情况制定),允许两个框有重叠的部分。如果其中一个物体挡住另一个物体一部分,框的时候就需要对另一个物体的形状进行脑补完整然后框起来即可。
- 独立规则:每一个目标物体均需要单独拉框,比如下图中三瓶水不能只拉一个框,而是要将三个目标分别拉框。
- 不框规则:图像模糊不清的不框,太暗和曝光过度的不框,不符合项目特殊规则的不框。
- 边界检查:确保框坐标不在图像边界上,防止载入数据或者数据扩展过程出现越界报错。
- 小目标规则:不同的算法对小目标的检测效果不同,对于小目标只要人眼能分清,都应该标出来。根据算法的需求,去决定是否启用这些样本参与训练。
开始标注
打开Make Sense点击Get Start即可开始标注。
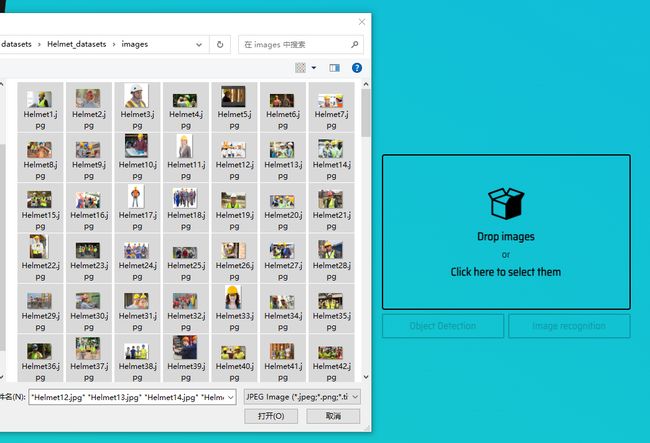
进入下一个页面,点击Drop images并选中所有数据集。
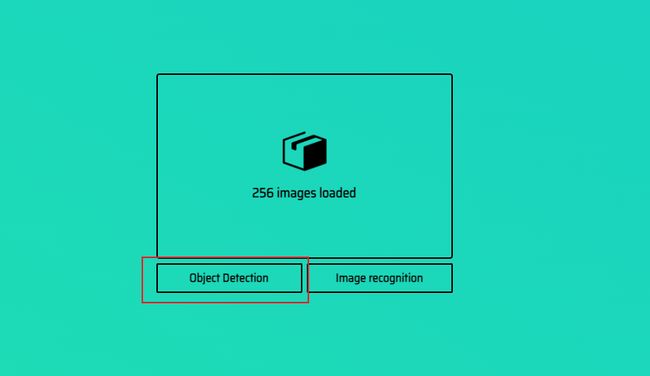
点击 Object Detection ,并添加标签,笔者这里以安全帽为例,所以创建标签Helmet。

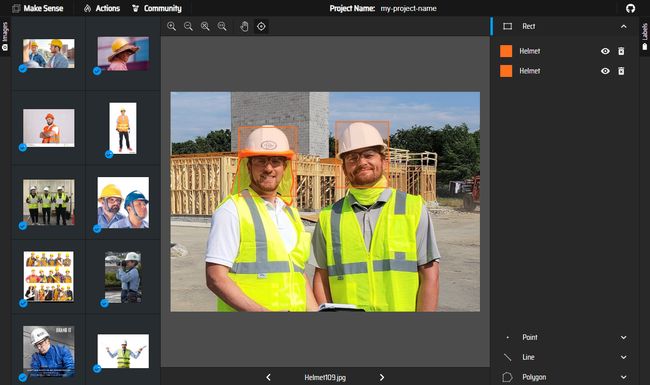
最后点击start project,便可以开始标注。
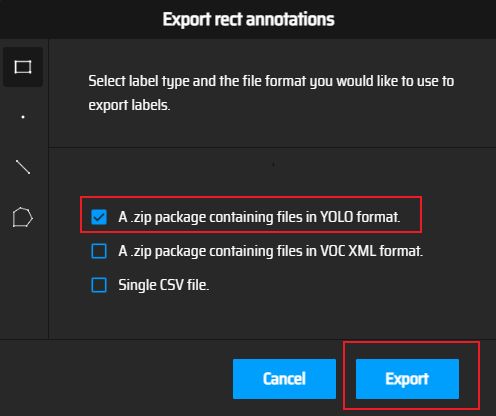
标注完成后,点击Action->Export Annotation,即可导出Yolo格式的标签。
标签格式如下:
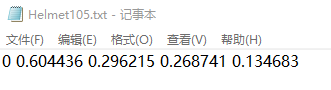
其中,x,y,width和height是指标注框的左上角点坐标及宽高信息。
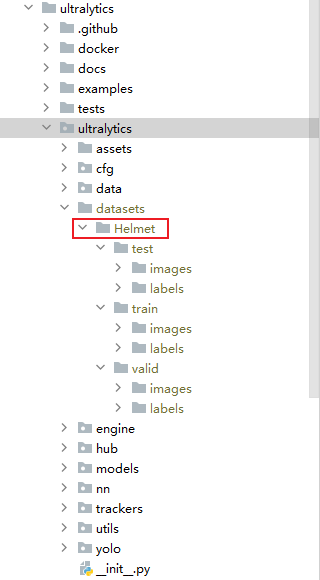
拆分数据集
将标注好的数据集拆分为训练集、验证集、测试集三部分,拆分后的数据集目录如下图所示。

另外附上拆分数据集源代码,您只需要替换为自己的实际路径即可。
import os
import random
import shutil
# 原数据集目录
root_dir = 'datasets/Helmet_dataset'
# 划分比例
train_ratio = 0.8
valid_ratio = 0.1
test_ratio = 0.1
# 设置随机种子
random.seed(42)
# 拆分后数据集目录
split_dir = 'datasets/Helmet_split'
os.makedirs(os.path.join(split_dir, 'train/images'), exist_ok=True)
os.makedirs(os.path.join(split_dir, 'train/labels'), exist_ok=True)
os.makedirs(os.path.join(split_dir, 'valid/images'), exist_ok=True)
os.makedirs(os.path.join(split_dir, 'valid/labels'), exist_ok=True)
os.makedirs(os.path.join(split_dir, 'test/images'), exist_ok=True)
os.makedirs(os.path.join(split_dir, 'test/labels'), exist_ok=True)
# 获取图片文件列表
image_files = os.listdir(os.path.join(root_dir, 'images'))
label_files = os.listdir(os.path.join(root_dir, 'labels'))
# 随机打乱文件列表
combined_files = list(zip(image_files, label_files))
random.shuffle(combined_files)
image_files_shuffled, label_files_shuffled = zip(*combined_files)
# 根据比例计算划分的边界索引
train_bound = int(train_ratio * len(image_files_shuffled))
valid_bound = int((train_ratio + valid_ratio) * len(image_files_shuffled))
# 将图片和标签文件移动到相应的目录
for i, (image_file, label_file) in enumerate(zip(image_files_shuffled, label_files_shuffled)):
if i < train_bound:
shutil.move(os.path.join(root_dir, 'images', image_file), os.path.join(split_dir, 'train/images', image_file))
shutil.move(os.path.join(root_dir, 'labels', label_file), os.path.join(split_dir, 'train/labels', label_file))
elif i < valid_bound:
shutil.move(os.path.join(root_dir, 'images', image_file), os.path.join(split_dir, 'valid/images', image_file))
shutil.move(os.path.join(root_dir, 'labels', label_file), os.path.join(split_dir, 'valid/labels', label_file))
else:
shutil.move(os.path.join(root_dir, 'images', image_file), os.path.join(split_dir, 'test/images', image_file))
shutil.move(os.path.join(root_dir, 'labels', label_file), os.path.join(split_dir, 'test/labels', label_file))
配置文件
将准备的数据集存放至Yolov8项目代码的ultralytics目录。
创建yaml文件
在数据集同级目录创建 Helmet.yaml 文件。
并填入以下内容,您可以根据自己的实际路径替换。
# Helmet
train: D:\aaa_my_own_xxj\code\my_own_test\ultralytics\ultralytics\datasets\Helmet\train
val: D:\aaa_my_own_xxj\code\my_own_test\ultralytics\ultralytics\datasets\Helmet\valid
test: D:\aaa_my_own_xxj\code\my_own_test\ultralytics\ultralytics\datasets\Helmet\test
# Classes
names:
0: Helmet
配置Yolov8
切换至 cfg/models/v8 目录,修改yolov8.yaml文件(这里主要修改的是类别数nc)。

模型训练
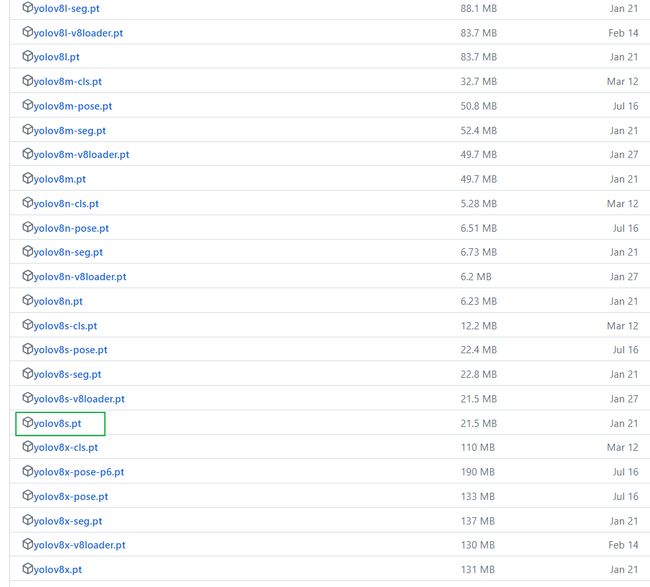
下载预训练模型
在Yolov8的GitHub开源库中下载对应版本的模型。我选的是yolo8s.pt。
https://github.com/ultralytics/assets/releases
训练
接下来就是训练模型了,笔者在这里选用的是从预训练的*.pt模型开始训练,执行命令如下:
yolo task=detect mode=train model=datasets/yolov8s.pt epochs=10 batch=1 data=datasets/Helmet.yaml
当然,你也可以选择其它两种方式:
- 从yaml构建一个全新的模型,训练命令如下:
yolo task=detect mode=train model=yolov8s.yaml epochs=10 batch=1 data=datasets/Helmet.yaml
- 从yaml中构建一个新模型,将预训练的权重转移到它并开始训练。
yolo task=detect mode=train model=yolov8s.yaml pretrained=yolov8s.pt epochs=10 batch=1 data=datasets/Helmet.yaml
其中,
- task:选择任务类型,可选[‘detect’, ‘segment’, ‘classify’, ‘init’]。
- mode: 选择是训练、验证还是预测的任务类型,可选[‘train’, ‘val’, ‘predict’]。
- model: 选择yolov8不同的模型配置文件,可选yolov8s、yolov8m、yolov8l、yolov8x、yolov8n。
- data: 选择生成的数据集配置文件。
- epochs:指的就是训练过程中整个数据集将被迭代多少次(我这里是cpu训练所以调的比较小)。
- batch:一次看完多少张图片才进行权重更新(同上)。
- pretrained:预训练模型。
训练ing…

训练完成,会在.\runs\detect\train\weights文件夹生成best.pt和last.pt权重。

模型测试
设置val数据集进行模型验证,命令如下:
yolo task=detect mode=val split=val model=runs/detect/train/weights/best.pt data=datasets/Helmet.yaml
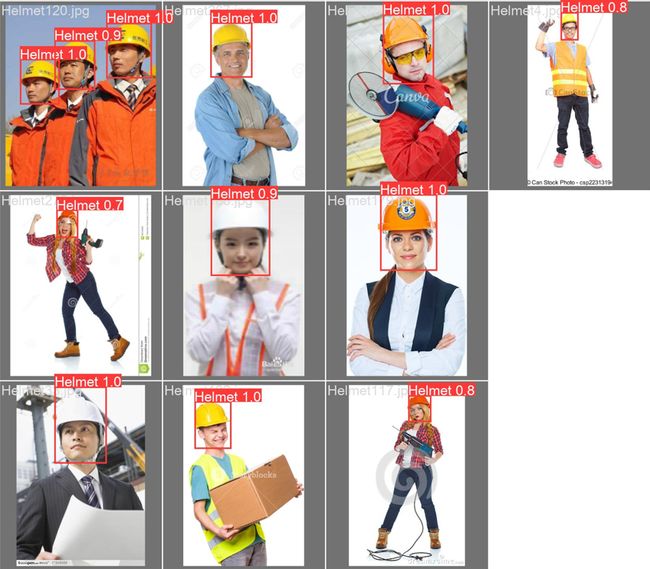
验证完成后,打开.\runs\detect\val文件夹,即可看到模型验证效果如下图所示。
同理,设置test数据集进行模型预测,命令如下:
yolo task=detect mode=val split=test model=runs/detect/train/weights/best.pt data=datasets/Helmet.yaml

模型导出
执行以下命令,导出模型。
yolo task=detect mode=export model=runs/detect/train/weights/best.pt
至此,使用Yolov8训练自己的数据集就完成了。