【transformer】动手学ViT
AN IMAGE IS WORTH 16X16 WORDS: TRANSFORMERS FOR IMAGE RECOGNITION AT SCALE
- 摘要
- Method
- 实验
- 代码-基于pytorch
- Training Visual Transformer on Dogs vs Cats Data
- 注释
- 一些词汇
ICLR2021
一幅图像值16x16个字:用于图像识别的transformers
将纯Transformer结构运用在CV中
Code

摘要
虽然Transformer架构已经成为NLP标准,但它在CV上的应用仍然有限。在CV中,attention要么与卷积网络一起应用,要么用于替换卷积网络的某些组件,同时保持其整体结构不变。作者认为这种对CNN的依赖是不必要的,直接应用于图像patch序列的纯transformer可以在图像分类任务上表现得非常好。当对大量数据进行预训练并传输到多个中型或小型图像识别基准(ImageNet, CIFAR-100, VTAB等)时,Vision Transformer (ViT)与最先进的卷积网络相比获得了出色的结果,同时需要更少的计算资源来训练。
Method
在模型设计上尽可能遵循原来的Transformer[1],对整个图像分类流程进行最少的修改,可扩展性强,以至于启发了后续大量的相关研究。
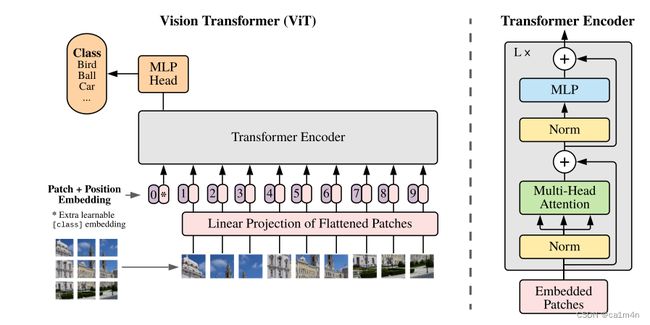
patch0是一个整合信息的可学习向量,用来对该图像进行分类,我们通常将人为增加的这个向量称为 Class Token。【因为原始输出的1-9向量单用都不合适,全用计算量又太大】
图像切分重排之后就失去了位置信息,所以需要加上位置信息(positional embedding)重新传进网络。【注意位置编码的操作是sum,而不是concat】
# 构造patch0
cls_tokens = repeat(self.cls_token, '() n d ->b n d', b = b)
x = torch.cat((cls_tokens, x), dim = 1)
# positional embedding
x += self.pos_embedding[:, :(n+1)]
x = self.dropout(x)
标准Transformer接收的输入是token embedding的1维序列,而对于2维的图像输入,我们将其reshape为平面2维的patch。
Transformer使用大小为D的常数向量在所有层中传递,所以我们拉平图像块,使用可训练的线性投影映射到D维。我们把这个投影的输出称为patch embeddings。
图像切分重排
self.to_patch_embedding = nn.Sequential(
Rearrange('b c (h p1) (w p2) -> b (h w) (p1 p2 c)', p1 = patch_height, p2 = patch_width), #图片切分重排
nn.Linear(patch_dim, dim), # Linear Projection of Flattened Patches
)
主要结构:
- Transformer的编码器由交替的多头自注意力(MSA)与多层感知机(MLP)模块组成。
x = self.transformer(x)
class Transformer(nn.Module):
def __init__(self, dim, depth, heads, dim_head, mlp_dim, dropout = 0.):
super().__init__()
self.layers = nn.ModuleList([])
for _ in range(depth):
self.layers.append(nn.ModuleList([
PreNorm(dim, Attention(dim, heads = heads, dim_head = dim_head, dropout = dropout)),
PreNorm(dim, FeedForward(dim, mlp_dim, dropout = dropout))
]))
def forward(self, x):
for attn, ff in self.layers:
x = attn(x) + x
x = ff(x) + x
return x
- Linear Projection of Flattened Patches(embedding层),线性操作降维到D。
nn.Linear(patch_dim, dim) # patch_dim = channels * patch_height * patch_width
- ViT中使用了 MLP Head对输出进行分类处理,这里的 MLP Head 由 LayerNorm 和两层全连接层组成,并且采用了 GELU 激活函数。
# layer norm
class PreNorm(nn.Module):
def __init__(self, dim, fn):
super().__init__()
self.norm = nn.LayerNorm(dim)
self.fn = fn
def forward(self, x, **kwargs):
return self.fn(self.norm(x), **kwargs)
# 一层FC,然后gelu,再FC层
class FeedForward(nn.Module):
def __init__(self, dim, hidden_dim, dropout = 0.):
super().__init__()
self.net = nn.Sequential(
nn.Linear(dim, hidden_dim),
nn.GELU(),
nn.Dropout(dropout),
nn.Linear(hidden_dim, dim),
nn.Dropout(dropout)
)
def forward(self, x):
return self.net(x)
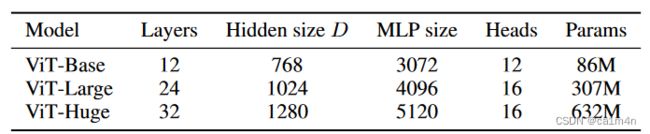
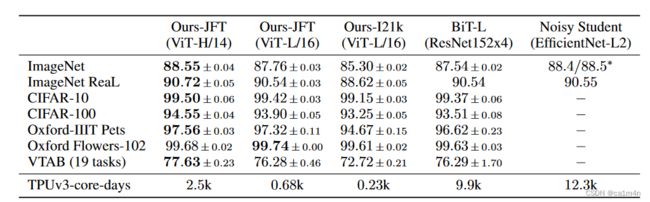
实验
ViT模型变体的细节设置
使用大规模数据集预训练后的 ViT 算法,迁移到其他小规模数据集进行训练,与使用 CNN 结构的SOTA算法精度对比
代码-基于pytorch
vit-pytorch
不是原论文提供的代码
 131行
131行
import torch
from torch import nn, einsum
import torch.nn.functional as F
from einops import rearrange, repeat
from einops.layers.torch import Rearrange
# helpers
#如果输入不是个tuple就返回一个tuple
def pair(t):
return t if isinstance(t, tuple) else (t, t)
# classes
#layer norm
class PreNorm(nn.Module):
def __init__(self, dim, fn):
super().__init__()
self.norm = nn.LayerNorm(dim)
self.fn = fn
def forward(self, x, **kwargs):
return self.fn(self.norm(x), **kwargs)
#fc层,过一层fc,然后gelu,然后再fc
class FeedForward(nn.Module):
def __init__(self, dim, hidden_dim, dropout = 0.):
super().__init__()
self.net = nn.Sequential(
nn.Linear(dim, hidden_dim),
nn.GELU(),
nn.Dropout(dropout),
nn.Linear(hidden_dim, dim),
nn.Dropout(dropout)
)
def forward(self, x):
return self.net(x)
#attention实现
class Attention(nn.Module):
def __init__(self, dim, heads = 8, dim_head = 64, dropout = 0.):
super().__init__()
inner_dim = dim_head * heads
project_out = not (heads == 1 and dim_head == dim)
self.heads = heads
self.scale = dim_head ** -0.5
self.attend = nn.Softmax(dim = -1)
self.to_qkv = nn.Linear(dim, inner_dim * 3, bias = False)
self.to_out = nn.Sequential(
nn.Linear(inner_dim, dim),
nn.Dropout(dropout)
) if project_out else nn.Identity()
def forward(self, x):
b, n, _, h = *x.shape, self.heads
#得到qkv
qkv = self.to_qkv(x).chunk(3, dim = -1)
#切分qkv
q, k, v = map(lambda t: rearrange(t, 'b n (h d) -> b h n d', h = h), qkv)
#dot product后除以根号下norm
dots = einsum('b h i d, b h j d -> b h i j', q, k) * self.scale
#softmax
attn = self.attend(dots)
#乘到v上,再sum,得到z
out = einsum('b h i j, b h j d -> b h i d', attn, v)
#整理shape输出
out = rearrange(out, 'b h n d -> b n (h d)')
return self.to_out(out)
#transformer block,分成了attention实现和fc实现两部分
class Transformer(nn.Module):
def __init__(self, dim, depth, heads, dim_head, mlp_dim, dropout = 0.):
super().__init__()
self.layers = nn.ModuleList([])
for _ in range(depth):
self.layers.append(nn.ModuleList([
PreNorm(dim, Attention(dim, heads = heads, dim_head = dim_head, dropout = dropout)),
PreNorm(dim, FeedForward(dim, mlp_dim, dropout = dropout))
]))
def forward(self, x):
#内部主要负责实现block的前向部分。
for attn, ff in self.layers:
x = attn(x) + x
x = ff(x) + x
return x
class ViT(nn.Module):
def __init__(self, *, image_size, patch_size, num_classes, dim, depth, heads, mlp_dim, pool = 'cls', channels = 3, dim_head = 64, dropout = 0., emb_dropout = 0.):
super().__init__()
image_height, image_width = pair(image_size)
patch_height, patch_width = pair(patch_size)
assert image_height % patch_height == 0 and image_width % patch_width == 0, 'Image dimensions must be divisible by the patch size.'
num_patches = (image_height // patch_height) * (image_width // patch_width)
patch_dim = channels * patch_height * patch_width
assert pool in {'cls', 'mean'}, 'pool type must be either cls (cls token) or mean (mean pooling)'
self.to_patch_embedding = nn.Sequential(
Rearrange('b c (h p1) (w p2) -> b (h w) (p1 p2 c)', p1 = patch_height, p2 = patch_width),
nn.Linear(patch_dim, dim),
)
self.pos_embedding = nn.Parameter(torch.randn(1, num_patches + 1, dim))
self.cls_token = nn.Parameter(torch.randn(1, 1, dim))
self.dropout = nn.Dropout(emb_dropout)
self.transformer = Transformer(dim, depth, heads, dim_head, mlp_dim, dropout)
self.pool = pool
self.to_latent = nn.Identity()
self.mlp_head = nn.Sequential(
nn.LayerNorm(dim),
nn.Linear(dim, num_classes)
)
def forward(self, img):
#输入端适配
x = self.to_patch_embedding(img)
b, n, _ = x.shape
#引入patch 0
cls_tokens = repeat(self.cls_token, '() n d -> b n d', b = b)
x = torch.cat((cls_tokens, x), dim=1)
#positional embedding
x += self.pos_embedding[:, :(n + 1)]
x = self.dropout(x)
#Transformer前向
x = self.transformer(x)
#拿到最后输入进mlp的patch
x = x.mean(dim = 1) if self.pool == 'mean' else x[:, 0]
x = self.to_latent(x)
return self.mlp_head(x)
Training Visual Transformer on Dogs vs Cats Data
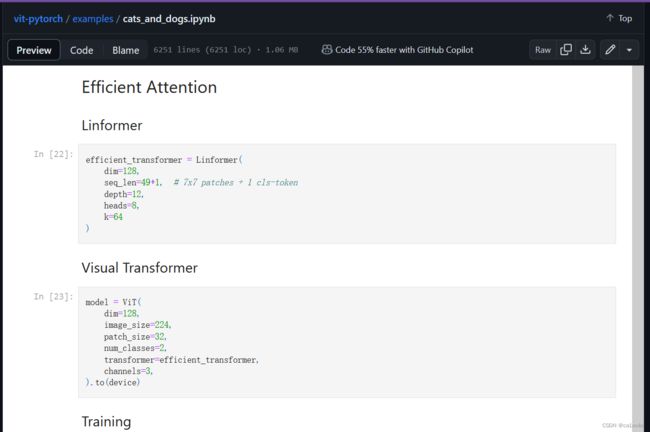
线性注意力(linear attention)机制将序列划分成固定大小的块,并仅对每个块内的元素进行注意力计算,而不是全局计算。通过将线性注意力引入传统的Transformer模型,Linformer能够更有效地处理长序列数据。
注释
[1] Ashish Vaswani.Attention is all you need,NIPS,2017
[2] 基于paddlepaddle2.1 | 深入理解图像分类中的Transformer-Vit,DeiT
[3] ViT猫狗大战示例
一些词汇
saturating performance 饱和性能
unprecedented 空前的
substantially 本质上;大体上
de-facto 事实上的
scalability 可扩展性