数据结构和算法(6):图
概述
图
所谓的图,可定义为 G = ( V , E ) G = (V, E) G=(V,E)。其中,集合 V V V 中的元素称作顶点。集合 E E E 中的元素分别对应于 V V V 中的
某一对顶点 ( u , v ) (u, v) (u,v),表示它们之间存在某种关系,故亦称作边。在某些文献中,顶点也称作节点,边亦称作弧。
从计算的需求出发,约定 V V V 和 E E E 均为有限集,通常将其规模分别记 n = ∣ V ∣ n = |V| n=∣V∣ 和 e = ∣ E ∣ e = |E| e=∣E∣。
若边 ( u , v ) (u, v) (u,v) 所对应顶点 u u u 和 v v v 的次序无所谓,则称作无向边。反之若 u u u 和 v v v 不对等,则称 ( u , v ) (u, v) (u,v) 为有向边。无向边 ( u , v ) (u, v) (u,v) 可记作 ( v , u ) (v, u) (v,u),而有向的 ( u , v ) (u, v) (u,v) 和 ( v , u ) (v, u) (v,u) 则不可混淆。
有向边 ( u , v ) (u, v) (u,v) 从 u u u 指向 v v v,其中 u u u 称作该边的起点或尾顶点,而 v v v 称作该边的终点或头顶点。
若 E E E 中各边均无方向,则 G G G 称作无向图;反之,若 E E E 中只含有向边,则 G G G 称作有向图;若 E E E 同时包含无向边和有向边,则 G G G 称作混合图。
无向图和混合图都可转化为有向图。
联接于同一顶点之间的边,称作自环。不含任何自环的图称作简单图。
度
对于任何边 e = ( u , v ) e = (u, v) e=(u,v),称顶点 u u u 和 v v v 彼此邻接,互为邻居;而它们都与边 e e e 彼此关联。在无向图中,与顶点 v v v 关联的边数,称作 v v v 的度数(degree),记作deg(v)。
对于有向边 e = ( u , v ) e = (u, v) e=(u,v), e e e 称作 u u u 的出边、 v v v 的入边。 v v v 的出边总数称作其出度,记作outdeg(v);入边总数称作其入度,记作indeg(v)。
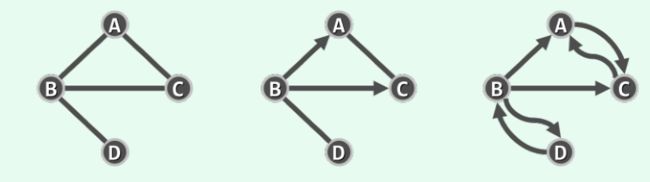
上面的图中:
第一个图:顶点{ A, B, C, D }的度数为{ 2, 3, 2, 1 }
第三个图:顶点{ A, B, C, D }的出度为{ 1, 3, 1, 1 },入度为{ 2, 1, 2, 1 }。
通路与环路
所谓路径或通路,就是由 m + 1 m + 1 m+1 个顶点与 m m m 条边交替而成的一个序列: π = { v 0 , e 1 , v 1 , e 2 , v 2 , . . . , e m , v m } \pi = \{ v_0,e_1, v_1,e_2,v_2,...,e_m,v_m\} π={v0,e1,v1,e2,v2,...,em,vm}。且对任何 0 < i ≤ m 0 < i \leq m 0<i≤m 都有 e i = ( v i − 1 , v i ) e_i = (v_{i-1} , v_i ) ei=(vi−1,vi)。也就是说,这些边依次地首尾相联。其中沿途边的总数 m m m,亦称作通路的长度,记作 ∣ π ∣ = m |\pi| = m ∣π∣=m。
沿途顶点互异的通路,称作简单通路
完全图是一种特殊的图,其中任何两个顶点之间都有一条边。完全图的顶点数为n的图记作 K n K_n Kn。
如果一个图的所有顶点都在一个平面上,那么它是平面图。换句话说,如果一个图可以被画在平面上,使得所有的边只在交叉点相交,那么这个图就是平面图。
对于完全图 K n K_n Kn,当 n ≥ 5 n≥5 n≥5 时,它一定不是平面图
库拉托夫斯基定理,一个图是平面图当且仅当它不含K5或K3,3的子图。而完全图Kn(n≥5)必然包含K5或K3,3的子图,因此它一定不是平面图。
邻接矩阵
Graph 模板类
using VStatus = enum { UNDISCOVERED, DISCOVERED, VISITED }; //顶点状态
using EType = enum { UNDETERMINED, TREE, CROSS, FORWARD, BACKWARD }; //边在遍历树中所属的类型
template <typename Tv, typename Te> //顶点类型、边类型
class Graph { //图Graph模板类
private:
void reset() { //所有顶点、边的辅助信息复位
for ( Rank v = 0; v < n; v++ ) { //所有顶点的
status( v ) = UNDISCOVERED; dTime( v ) = fTime( v ) = -1; //状态,时间标签
parent( v ) = -1; priority( v ) = INT_MAX; //(在遍历树中的)父节点,优先级数
for ( Rank u = 0; u < n; u++ ) //所有边的
if ( exists( v, u ) ) type( v, u ) = UNDETERMINED; //类型
}
}
void BFS( Rank, Rank& ); //(连通域)广度优先搜索算法
void DFS( Rank, Rank& ); //(连通域)深度优先搜索算法
void BCC( Rank, Rank&, Stack<Rank>& ); //(连通域)基于DFS的双连通分量分解算法
bool TSort( Rank, Rank&, Stack<Tv>* ); //(连通域)基于DFS的拓扑排序算法
template <typename PU> void PFS( Rank, PU ); //(连通域)优先级搜索框架
public:
// 顶点
Rank n; //顶点总数
virtual Rank insert( Tv const& ) = 0; //插入顶点,返回编号
virtual Tv remove( Rank ) = 0; //删除顶点及其关联边,返回该顶点信息
virtual Tv& vertex( Rank ) = 0; //顶点的数据(该顶点的确存在)
virtual Rank inDegree( Rank ) = 0; //顶点的入度(该顶点的确存在)
virtual Rank outDegree( Rank ) = 0; //顶点的出度(该顶点的确存在)
virtual Rank firstNbr( Rank ) = 0; //顶点的首个邻接顶点
virtual Rank nextNbr( Rank, Rank ) = 0; //顶点(相对当前邻居的)下一邻居
virtual VStatus& status( Rank ) = 0; //顶点的状态
virtual Rank& dTime( Rank ) = 0; //顶点的时间标签dTime
virtual Rank& fTime( Rank ) = 0; //顶点的时间标签fTime
virtual Rank& parent( Rank ) = 0; //顶点在遍历树中的父亲
virtual int& priority( Rank ) = 0; //顶点在遍历树中的优先级数
// 边:这里约定,无向边均统一转化为方向互逆的一对有向边,从而将无向图视作有向图的特例
Rank e; //边总数
virtual bool exists( Rank, Rank ) = 0; //边(v, u)是否存在
virtual void insert( Te const&, int, Rank, Rank ) = 0; //在两个顶点之间插入指定权重的边
virtual Te remove( Rank, Rank ) = 0; //删除一对顶点之间的边,返回该边信息
virtual EType& type( Rank, Rank ) = 0; //边的类型
virtual Te& edge( Rank, Rank ) = 0; //边的数据(该边的确存在)
virtual int& weight( Rank, Rank ) = 0; //边(v, u)的权重
// 算法
void bfs( Rank ); //广度优先搜索算法
void dfs( Rank ); //深度优先搜索算法
void bcc( Rank ); //基于DFS的双连通分量分解算法
Stack<Tv>* tSort( Rank ); //基于DFS的拓扑排序算法
void prim( Rank ); //最小支撑树Prim算法
void dijkstra( Rank ); //最短路径Dijkstra算法
template <typename PU> void pfs( Rank, PU ); //优先级搜索框架
};
顶点和边
template <typename Tv> struct Vertex { //顶点对象(为简化起见,幵未严格封装)
Tv data; int inDegree, outDegree; VStatus status; //数据、出入度数、状态
int dTime, fTime; //时间标签
int parent; int priority; //在遍历树中的父节点、优先级数
Vertex(Tv const& d = (Tv)0) : //构造新顶点
data(d), inDegree(0), outDegree(0), status(UNDISCOVERED),
dTime(-1), fTime(-1), parent(-1), priority(INT_MAX) {} //暂不考虑权重溢出
};
template <typename Te> struct Edge { //边对象(为简化起见,并未严格封装)
Te data; int weight; EType type; //数据、权重、类型
Edge(Te const& d, int w) : data(d), weight(w), type(UNDETERMINED) {} //构造
};
template <typename Tv, typename Te> //顶点类型、边类型
邻接矩阵
邻接矩阵(adjacency matrix)是图 ADT 最基本的实现方式,使用方阵A[n][n]表示由n个顶点构成的图,其中每个单元,各自负责描述一对顶点之间可能存在的邻接关系,故此得名。
class GraphMatrix : public Graph<Tv, Te> { //基亍向量,以邻接矩阵形式实现的图
private:
Vector< Vertex< Tv > > V; //顶点集(向量)
Vector< Vector< Edge< Te >* > > E; //边集(邻接矩阵)
public:
GraphMatrix() { n = e = 0; } //构造
~GraphMatrix() { //析构
for (int j = 0; j < n; j++) //所有动态创建的
for (int k = 0; k < n; k++) //边记录
delete E[j][k]; //逐条清除
}
// 顶点的基本操作:查询第i个顶点(0 <= i < n)
virtual Tv & vertex(int i) { return V[i].data; } //数据
virtual int inDegree(int i) { return V[i].inDegree; } //入度
virtual int outDegree(int i) { return V[i].outDegree; } //出度
virtual int firstNbr(int i) { return nextNbr(i, n); } //首个邻接顶点
virtual int nextNbr(int i, int j) //相对于顶点j的下一邻接顶点(改用邻接表可提高效率)
{ while ((-1 < j) && (!exists(i, --j))); return j; } //逆向线性试探
virtual VStatus & status(int i) { return V[i].status; } //状态
virtual int& dTime(int i) { return V[i].dTime; } //时间标签dTime
virtual int& fTime(int i) { return V[i].fTime; } //时间标签fTime
virtual int& parent(int i) { return V[i].parent; } //在遍历树中的父亲
virtual int& priority(int i) { return V[i].priority; } //在遍历树中的优先级数
// 顶点的动态操作
virtual int insert(Tv const& vertex) { //插入顶点,返回编号
for (int j = 0; j < n; j++) E[j].insert(NULL); n++; //各顶点预留一条潜在的关联边
E.insert(Vector<Edge<Te>*>(n, n, (Edge<Te>*) NULL)); //创建新顶点对应的边向量
return V.insert(Vertex<Tv>(vertex)); //顶点向量增加一个顶点
}
virtual Tv remove(int i) { //删除第i个顶点及其关联边(0 <= i < n)
for (int j = 0; j < n; j++) //所有出边
if (exists(i, j)) { delete E[i][j]; V[j].inDegree--; } //逐条删除
E.remove(i); n--; //删除第i行
Tv vBak = vertex(i); V.remove(i); //删除顶点i
for (int j = 0; j < n; j++) //所有入边
if (Edge<Te>* e = E[j].remove(i)) { delete e; V[j].outDegree--; } //逐条删除
return vBak; //返回被删除顶点的信息
}
// 边的确讣操作
virtual bool exists(int i, int j) //边(i, j)是否存在
{ return (0 <= i) && (i < n) && (0 <= j) && (j < n) && E[i][j] != NULL; }
// 边的基本操作:查询顶点i不与j之间的联边(0 <= i, j < n且exists(i, j))
virtual EType & type(int i, int j) { return E[i][j]->type; } //边(i, j)的类型
virtual Te & edge(int i, int j) { return E[i][j]->data; } //边(i, j)的数据
virtual int& weight(int i, int j) { return E[i][j]->weight; } //边(i, j)的权重
// 边的动态操作
virtual void insert(Te const& edge, int w, int i, int j) { //插入权重为w的边e = (i, j)
if (exists(i, j)) return; //确保该边尚不存在
E[i][j] = new Edge<Te>(edge, w); //创建新边
e++; V[i].outDegree++; V[j].inDegree++; //更新边计数不关联顶点的度数
}
virtual Te remove(int i, int j) { //删除顶点i和j之间的联边(exists(i, j))
Te eBak = edge(i, j); delete E[i][j]; E[i][j] = NULL; //备分后删除边记录
e--; V[i].outDegree--; V[j].inDegree--; //更新边计数与关联顶点的度数
return eBak; //返回被删除边的信息
}
}
对于任意顶点 i,枚举其所有的邻接顶点 neighbor:
int nextNbr(int i, int j){ //若已枚举至邻居 j,则转向下一邻居
while((-1 < j)&& !exists(i,--j)); //逆向顺序查找 O(n)
return j;
} //改用邻接表可提高至O(1+ outDegree(1))
int firstNbr(int i){
return nextNbr(i,n);
} //首个邻居
判断两个顶点之间是否存在一条边:
bool exists(int i, int j){
return (0 <= i)&&(i < n)&&(0 <= j)&&(j < n) && E[i][j] != NULL; //短路求值
} //以下假定exists(i,j)...
Te & edge(int i,int j) //边(i,j)的数据
{return E[i][j]->data;} //O(1)
邻接矩阵的优点包括:
1.可以快速判断任意两个节点之间是否存在边。
2.适用于稠密图(图中边的数量接近节点数量的平方)。
邻接矩阵的缺点:
1.对于稀疏图(图中边的数量远小于节点数量的平方),矩阵中有大量的0,造成空间浪费。
2.插入和删除边的操作比较复杂,需要修改矩阵中的元素。
3.占用的内存空间随着节点数量的增加而快速增加。
广度优先搜索
越早被访问到的顶点, 其邻居优先被选用

从顶点 s 开始的广度优先搜索:
1.访问顶点s;
2.依次访问s所有尚未访问的邻接顶点;
3.依次访问它们尚未访问的邻接顶点;
4…如此反复
5.直至没有尚未访问的邻接顶点
实现
template <typename Tv, typename Te> //广度优先搜索BFS算法(全图)
void Graph<Tv, Te>::bfs ( int s ) { //assert: 0 <= s < n
reset(); int clock = 0; int v = s; //初始化
do //逐一检查所有顶点
if ( UNDISCOVERED == status ( v ) ) //一旦遇到尚未发现的顶点
BFS ( v, clock ); //即从该顶点出发启动一次BFS
while ( s != ( v = ( ++v % n ) ) ); //按序号检查,故不漏不重
}
template <typename Tv, typename Te> //广度优先搜索BFS算法(单个连通域)
void Graph<Tv, Te>::BFS ( int v, int& clock ) { //assert: 0 <= v < n
Queue<int> Q; //引入辅助队列
status ( v ) = DISCOVERED; Q.enqueue ( v ); //初始化起点
while ( !Q.empty() ) { //在Q变空之前,不断
int v = Q.dequeue(); dTime ( v ) = ++clock; //取出队首顶点v
for ( int u = firstNbr ( v ); -1 < u; u = nextNbr ( v, u ) ) //枚举v的所有邻居u
if ( UNDISCOVERED == status ( u ) ) { //若u尚未被发现,则
status ( u ) = DISCOVERED; Q.enqueue ( u ); //发现该顶点
type ( v, u ) = TREE; parent ( u ) = v; //引入树边拓展支撑树
} else { //若u已被发现,或者甚至已访问完毕,则
type ( v, u ) = CROSS; //将(v, u)归类亍跨边
}
status ( v ) = VISITED; //至此,当前顶点讵问完毕
}
}
算法的实质功能,由子算法BFS()完成。对该函数的反复调用,即可遍历所有连通或可达域。仿照树的层次遍历,这里也借助队列Q,来保存已被发现,但尚未访问完毕的顶点。因此,任何顶点在进入该队列的同时,都被随即标记为DISCOVERED(已发现)状态。
BFS()的每一步迭代,都先从Q中取出当前的首顶点v;再逐一核对其各邻居u的状态并做相应处理;最后将顶点v置为VISITED(访问完毕)状态,即可进入下一步迭代。
若顶点u尚处于UNDISCOVERED(未发现)状态,则令其转为DISCOVERED状态,并随即加入队列Q。实际上,每次发现一个这样的顶点u,都意味着遍历树可从v到u拓展一条边。于是,将边(v,u)标记为树边(tree edge),并按照遍历树中的承袭关系,将v记作u的父节点。
若顶点u已处于DISCOVERED状态(无向图),或者甚至处于VISITED状态(有向图),则意味着边(v,u)不属于遍历树,于是将该边归类为跨边(cross edge)。
BFS()遍历结束后,所有访问过的顶点通过parent[]指针依次联接,从整体上给出了原图某一连通或可达域的一棵遍历树,称作广度优先搜索树,或简称BFS树(BFS tree)。
复杂度:BFS搜索所使用的空间,主要消耗在用于维护顶点访问次序的辅助队列、用于记录顶点和边状态的标识位向量,累计 O ( n ) + O ( n ) + O ( e ) = O ( n + e ) \mathcal O(n) + \mathcal O(n) + \mathcal O(e) = \mathcal O(n + e) O(n)+O(n)+O(e)=O(n+e)
时间方面:首先需花费 O ( n + e ) \mathcal O(n + e) O(n+e) 时间复位所有顶点和边的状态。不计对子函数 BFS() 的调用,bfs() 本身对所有顶点的枚举共需O(n)时间。而在对BFS()的所有调用中,每个顶点、每条边均只耗费O(1)时间,累计O(n + e)。
综合起来,BFS搜索总体仅需O(n + e)时间。
深度优先搜索
优先选取最后一个被访问到的顶点的邻居
以顶点s为基点的DFS搜索,将首先访问顶点s;再从s所有尚未访问到的邻居中任取其一,并以之为基点,递归地执行DFS搜索。故各顶点被访问到的次序,类似于树的先序遍历;而各顶点被访问完毕的次序类似于树的后续遍历。
template < typename Tv, typename Te> //深度优先搜索DFS算法(全图)
void Graph<Tv, Te>::dfs(Rank s) { // s < n
reset(); Rank clock = 0; //全图复位
for (Rank v = s; v < s + n; v++) //从s起顺次检查所有顶点
if (UNDISCOVERED == status(v % n)) //一旦遇到尚未发现者
DFS(v % n, clock); //即从它出发启动一次DFS
} //如此可完整覆盖全图,且总体复杂度依然保持为O(n+e)
template < typename Tv, typename Te> //深度优先搜索DFS算法(单个连通域)
void Graph<Tv, Te>::DFS(Rank v, Rank & clock) { // v < n
dTime(v) = clock++; status(v) = DISCOVERED; //发现当前顶点v
for (Rank u = firstNbr(v); -1 != u; u = nextNbr(v, u)) //考查v的每一个邻居u
switch (status(u)) { //并视其状态分别处理
case UNDISCOVERED: // u尚未发现,意味着支撑树可在此拓展
type(v, u) = TREE; parent(u) = v; DFS(u, clock); break;
case DISCOVERED: // u已被发现但尚未访问完毕,应属被后代指向的祖先
type(v, u) = BACKWARD; break;
default: // u已访问完毕(VISITED,有向图),则视承袭关系分为前向边或跨边
type(v, u) = (dTime(v) < dTime(u)) ? FORWARD : CROSS; break;
}
status(v) = VISITED; fTime(v) = clock++; //至此,当前顶点v方告访问完毕
}
算法的实质功能,由子算法DFS()递归地完成。每一递归实例中,都先将当前节点v标记为DISCOVERED(已发现)状态,再逐一核对其各邻居u的状态并做相应处理。待其所有邻居均已处理完毕之后,将顶点v置为VISITED(访问完毕)状态,便可回溯。
若顶点u尚处于UNDISCOVERED(未发现)状态,则将边(v,u)归类为树边(tree edge),并将v记作u的父节点。此后,便可将u作为当前顶点,继续递归地遍历。
若顶点u处于DISCOVERED状态,则意味着在此处发现一个有向环路。此时,在DFS遍历树中u必为v的祖先,故应将边(v,u)归类为后向边(back edge)。
这里为每个顶点v都记录了被发现的和访问完成的时刻,对应的时间区间[dTime(v),fTime(v)]均称作v的活跃期(active duration)。实际上,任意顶点v和u之间是否存在祖先/后代的“血缘”关系,完全取决于二者的活跃期是否相互包含。
对于有向图
对于有向图,顶点u还可能处于VISITED状态。此时,只要比对v与u的活跃期,即可判定在DFS树中v是否为u的祖先。若是,则边(v,u)应归类为前向边(forward edge);否则,二者必然来自相互独立的两个分支,边(v,u)应归类为跨边(cross edge)。
DFS(s)返回后,所有访问过的顶点通过parent[]指针依次联接,从整体上给出了顶点s所属连通或可达分量的一棵遍历树,称作深度优先搜索树或DFS树(DFS tree)。与BFS搜索一样,此时若还有其它的连通或可达分量,则可以其中任何顶点为基点,再次启动DFS搜索。
最终,经各次DFS搜索生成的一系列DFS树,构成了DFS森林(DFS forest) 。
深度优先搜索算法所使用的空间,主要消耗于各顶点的时间标签和状态标记,以及各边的分类标记,二者累计不超过O(n) + O(e) = O(n + e)。
首先需要花费O(n + e)时间对所有顶点和边的状态复位。不计对子函数DFS()的调用,DFS()本身对所有顶点的枚举共需O(n)时间。不计DFS()之间相互的递归调用,每个顶点、每条边只在子函数DFS()的某一递归实例中耗费O(1)时间,故累计亦不过O(n + e)时间。
综合起来,深度优先搜索也可以在O(n + e)时间完成。
DFS 和 BFS 的区别
深度优先搜索(DFS)和广度优先搜索(BFS)是两种常用于图的遍历算法,它们有以下主要区别:
-
遍历顺序:
深度优先搜索 (DFS): 从起始节点开始,沿着一条路径尽可能深入地探索,直到达到叶子节点,然后回溯到上一个节点,再继续探索下一个分支。DFS倾向于先探索深度较深的分支。
广度优先搜索 (BFS): 从起始节点开始,首先访问起始节点的所有邻居节点,然后逐层访问与起始节点距离为1、2、3等的节点。BFS倾向于先探索离起始节点近的节点。 -
数据结构:
深度优先搜索 (DFS): 通常使用递归方法或栈数据结构来实现。
广度优先搜索 (BFS): 通常使用队列数据结构来实现。 -
搜索目标:
深度优先搜索 (DFS): 主要用于查找路径或判断图中是否存在某个节点,通常不关心最短路径。
广度优先搜索 (BFS): 主要用于寻找最短路径或层次遍历,通常用于求解最短路径问题。 -
内存消耗:
深度优先搜索 (DFS): 在最坏情况下,可能需要消耗大量的内存空间,因为它需要递归调用或维护一个深度较深的栈。
广度优先搜索 (BFS): 通常需要维护一个队列,因此在内存消耗上可能更高效,但需要考虑队列大小的问题。 -
时间复杂度:
深度优先搜索 (DFS): 在某些情况下,DFS可能会找到解决方案更快,但在最坏情况下,可能需要遍历整个图,时间复杂度为O(V +E),其中V是节点数量,E是边数量。
广度优先搜索 (BFS): 通常用于求解最短路径问题,时间复杂度也为O(V + E),但在一些情况下,BFS可能会找到解决方案更快。
拓扑排序之零入度算法
拓扑排序是一种用于有向无环图(DAG)的排序算法,其目标是将图中的节点线性排序,使得任何有向边都从左到右指向更大的节点。拓扑排序通常用于表示任务之间的依赖关系,以确保在执行任务时不会出现循环依赖。
基本思想:
1.首先找到图中所有入度为零的节点,将它们添加到拓扑排序的结果中。
2.然后移除这些入度为零的节点及其出边,更新剩余节点的入度。
3.重复步骤1和步骤2,直到所有节点都添加到拓扑排序的结果中,或者发现有向图中存在环路(无法进行拓扑排序)。
#include 首先构建了一个有向图的邻接表表示。然后,通过计算每个节点的入度,找到入度为零的节点并将其添加到拓扑排序结果中。接着,移除这些节点及其出边,更新剩余节点的入度。不断重复这个过程,直到完成拓扑排序或发现图中存在环路。
如果图中存在环路,零入度算法将无法完成拓扑排序。
拓扑排序之零出度算法
拓扑排序的零出度算法与零入度算法非常相似,不同之处在于它关注的是节点的出度(即节点指向其他节点的边)。
基本思想:
1.首先找到所有出度为零的节点,将它们添加到拓扑排序的结果中;
2.然后删除这些节点及其出边,继续查找出度为零的节点;
3.以此类推,直到完成整个拓扑排序。
如果图中存在环路,零出度算法也将无法完成拓扑排序。