ORB-SLAM2实时稠密地图,解决运行报段错误(核心已转储)运行数据集时出现段错误,出现可视化界面后闪退(添加实时彩色点云地图+保存点云地图)
高翔的稠密建图仓库
1. git clone https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map.git
2. 去ORB SLAM2里拷贝Vocabulary到/home/cgm/ORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified文件夹下
3. 删除一些build文件夹
删除ORB_SLAM2_modified/Thirdparty/DBoW2/build、ORB_SLAM2_modified/Thirdparty/g2o/build以及ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/build这3个 build 文件夹
4. 尝试运行./build.sh看看报什么错,再解决;
chmod +x build.sh
./build.sh
5. 报错如下:
/usr/include/pcl-1.10/pcl/pcl_config.h:7:4:
error:#error PCL requires C++14 or above
7 | #errorPCL requires C++14 or above
**原因:**错误消息 PCL requires C++14 or above 表明您正在使用的点云库 (PCL) 需要至少 C++14 的 C++ 标准版本才能编译。您的项目可能使用较旧的 C++ 标准,从而导致此问题。
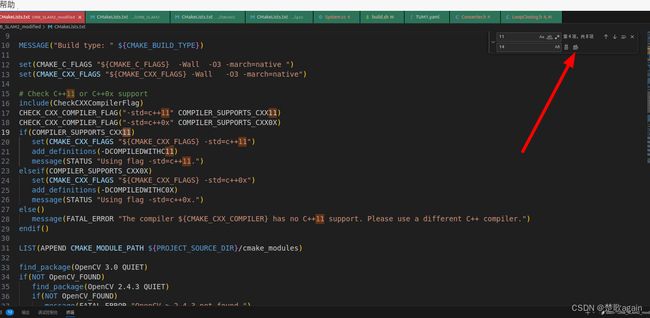
**解决:**修改ORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/CMakeLists.txt文件-std=c++11换成-std=c++14
下面的这是原来的
# # Check C++11 or C++0x support
# include(CheckCXXCompilerFlag)
# CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
# CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
# if(COMPILER_SUPPORTS_CXX11)
# set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
# add_definitions(-DCOMPILEDWITHC11)
# message(STATUS "Using flag -std=c++11.")
# elseif(COMPILER_SUPPORTS_CXX0X)
# set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
# add_definitions(-DCOMPILEDWITHC0X)
# message(STATUS "Using flag -std=c++0x.")
# else()
# message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
# endif()
修改为:
# Check C++14 or C++0x support 好像PCL1.10版本需要C++14
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++14" COMPILER_SUPPORTS_CXX14)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX14)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14")
add_definitions(-DCOMPILEDWITHC14)
message(STATUS "Using flag -std=c++14.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++14 support. Please use a different C++ compiler.")
endif()
6. 修改ORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/CMakeLists.txt文件之后再次运行./build.sh看看报什么错,
/usr/include/c++/9/bits/stl_map.h:122:71: error: static assertion failed: std::map must have the same value_type as its allocator
122 | static_assert(is_same<typename _Alloc::value_type, value_type>::value,
解决办法: 打开LoopClosing.h,将
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose;
替换为
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<KeyFrame *const, g2o::Sim3> > > KeyFrameAndPose;
7. 报错:
/home/cgm/ORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/Examples/Monocular/mono_tum.cc:81:22: error: ‘std::chrono::monotonic_clock’ has not been declared
81 | std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
ORB_SLAM安装问题error: ‘std::chrono::monotonic_clock’ has not been declared
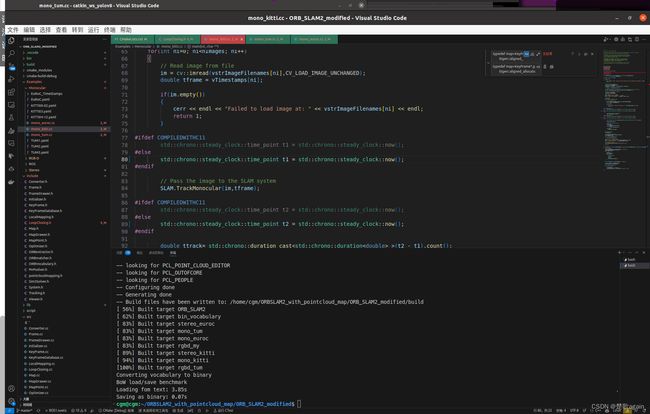
解决办法:将代码中所有使用 `std::chrono::monotonic_clock` 的地方替换为 `std::chrono::steady_clock`。
8. 成功编译截图
9. 运行TUM数据集
使用如下命令./rgbd_tum path_to_vocabulary path_to_settings path_to_sequence path_to_association
我的命令如下:
./bin/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml /home/cgm/DataSet/TUM_Dataset/rgbd_dataset_freiburg1_xyz Examples/RGB-D/associations/fr1_xyz.txt
10. 报错分析
(1) 编译出现参数未声明问题,参考代码中有些未在头文件中声明,要完整声明才能正确编译。
(2) 运行数据集时出现段错误,出现可视化界面后闪退
ORB Extractor Parameters:
- Number of Features: 1000
- Scale Levels: 8
- Scale Factor: 1.2
- Initial Fast Threshold: 20
- Minimum Fast Threshold: 7
Depth Threshold (Close/Far Points): 3.09294
-------
Start processing sequence ...
Images in the sequence: 792
New map created with 834 points
receive a keyframe, id = 1
generate point cloud for kf 1, size=25153
show global map, size=14971
receive a keyframe, id = 2
generate point cloud for kf 2, size=25597
段错误 (核心已转储)
- 有的说:将其中的
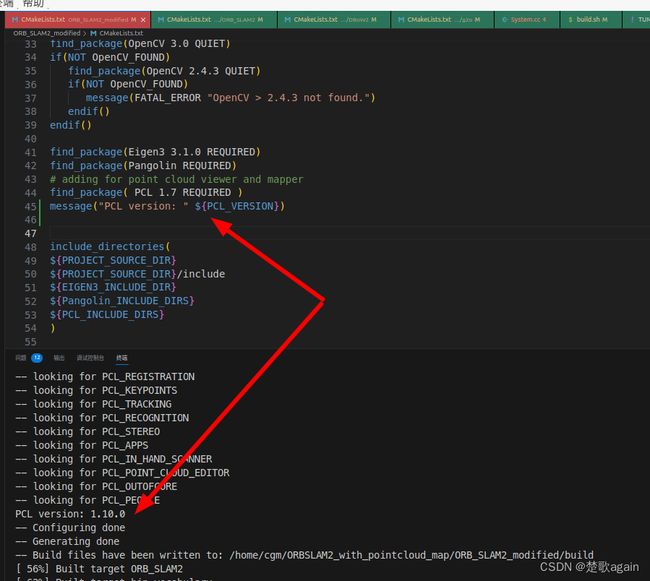
PCL 1.7 REQUIRED中的1.7删掉(我的是1.10.0,不用删)
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
# adding for point cloud viewer and mapper
# find_package( PCL 1.7 REQUIRED )#修改这行
find_package( PCL REQUIRED )#改为这行
message("PCL version: " ${PCL_VERSION})#增加这行代码可查看PCL版本信息
注意:我的PCL版本是1.10.0,我没有改动这个代码
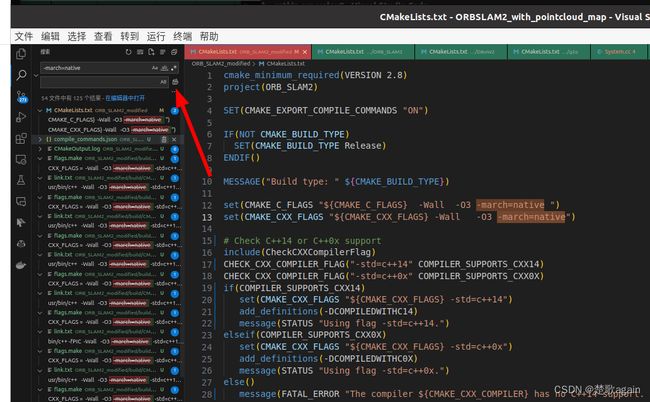
出现这个原因是你没有把 -march=native 删干净,你是手动删除的 -march=native出现这个原因是你没有把 -march=native 删干净,你是手动删除的 -march=native出现这个原因是你没有把 -march=native 删干净,你是手动删除的 -march=native- -
出现这个原因是你没有把 -march=native 删干净,你是手动删除的 -march=native 出现这个原因是你没有把 -march=native 删干净,你是手动删除的 -march=native出现这个原因是你没有把 -march=native 删干净,你是手动删除的 -march=native
如果手动删的话,要删除这四个CMakeLists.txt文件里的-march=native
ORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/CMakeLists.txtORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/CMakeLists.txtORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/Thirdparty/DBoW2/CMakeLists.txtORBSLAM2_with_pointcloud_map/ORB_SLAM2_modified/Thirdparty/g2o/CMakeLists.txt
建议使用 CTRL+SHIFT+F进行搜索全替换,将所有的-march=native替换为空格
成功运行截图(灰色点云)
11. 使用ORB-SLAM2保存彩色点云地图
ORB-SLAM2是一个用于实时单目、双目和RGB-D相机SLAM的流行开源库。如果您想要修改ORB-SLAM2以保存彩色点云地图,以下是一些您需要进行的修改步骤。
- 步骤1: 在Tracking.h中添加成员变量
在ORB-SLAM2的include/Tracking.h文件中,您需要添加以下成员变量,以保存当前帧的彩色图像:
// Current Frame
Frame mCurrentFrame;
cv::Mat mImRGB; // 添加这行
cv::Mat mImGray;
cv::Mat mImDepth;
- 步骤2: 在Tracking.cc中修改代码
在ORB-SLAM2的src/Tracking.cc文件中,需要修改两个地方。
第一处修改
cv::Mat Tracking::GrabImageRGBD(const cv::Mat &imRGB, const cv::Mat &imD, const double ×tamp)
{
mImRGB = imRGB; // 添加这行
mImGray = imRGB;
mImDepth = imD;
第二处修改
// insert Key Frame into point cloud viewer
//mpPointCloudMapping->insertKeyFrame( pKF, this->mImGray, this->mImDepth );
mpPointCloudMapping->insertKeyFrame( pKF, this->mImRGB, this->mImDepth ); // 修改地方
- 步骤3: 保存彩色点云地图
修改ORB-SLAM2的src/pointcloudmapping.cc文件,在其中调用PCL库的 pcl::io::savePCDFileBinary 函数来保存点云地图。
首先,添加以下头文件:
#include 然后,在 void PointCloudMapping::viewer() 函数中,大约在第123行附近加入保存地图的命令:
for (size_t i = lastKeyframeSize; i < N; i++)
{
PointCloud::Ptr p = generatePointCloud(keyframes[i], colorImgs[i], depthImgs[i]);
*globalMap += *p;
}
// pcl::io::savePCDFileBinary("vslam.pcd", *globalMap); // 只需要加入这一句
//我用的下面的
// 存储点云
string save_path = "./resultPointCloudFile.pcd";
pcl::io::savePCDFile(save_path, *globalMap);
cout << "save pcd files to : " << save_path << endl;
- 步骤4: 重新编译程序
修改代码后,您需要重新编译以使更改生效。
- 步骤5: 安装PCL工具并查看生成的文件
为了查看保存的彩色点云地图,您需要安装PCL工具,并使用pcl_viewer工具来查看生成的文件。您可以使用以下命令来安装和查看:
# 安装PCL工具
sudo apt-get install pcl-tools
# 查看保存的点云地图文件
pcl_viewer vslam.pcd
现在,您已经修改了ORB-SLAM2以保存彩色点云地图,并且可以使用PCL工具来查看生成的地图文件。

按住shift+鼠标滚轮可以上下移动点云;
按住ctrl+鼠标坐标可以顺时针逆时针拖动点云;
高动态环境的数据集rgbd_dataset_freiburg3_walking_xyz
./bin/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM3.yaml /home/cgm/DataSet/TUM_Dataset/rgbd_dataset_freiburg3_walking_xyz/ Examples/RGB-D/associations/fr3_walking_xyz.txt