【数字图像处理】噪点检测、区域生长、算子边缘检测、单阈值分割(第四章-图像增强 实验:图像分割与边缘检测)
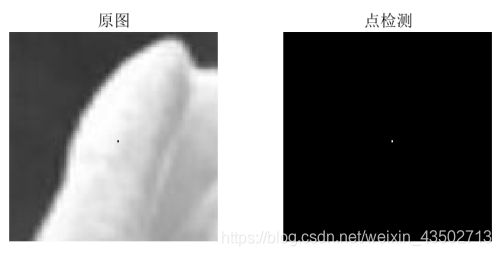
噪点检测
在图像中加入一个孤立噪声点,选择合适的算子将之检测出
%点检测
img=imread('flower.jpg');
img(60,60)=0;
figure,subplot(121),imshow(img),title('原图');
n=3;
[width,height]=size(img);
img_1=double(img);
img2=img_1;
for i=2:width-n+1
for j=2:height-n+1
x=img_1(i:i+n-1,j:j+n-1);
xx=-sum(sum(x))+9*x(1+(n-1)/2,1+(n-1)/2);%孤立点检测,中间系数为8,其他系数都为-1 【先全部减一,再把中间点加9】
img2(i+(n-1)/2,j+(n-1)/2)=xx/8;
end
end
img3=abs(img2(2:height-1,2:width-1));%边缘不是梯度,所以去掉
% figure,imshow(unit8(img3));
T=max(max(img3));%求一次max是求得每一列的最大值
img3(img3==T)=255;
img3(img3<T)=0;
img_end=unit8(img3);
subplot(122),imshow(img_end),title('点检测');
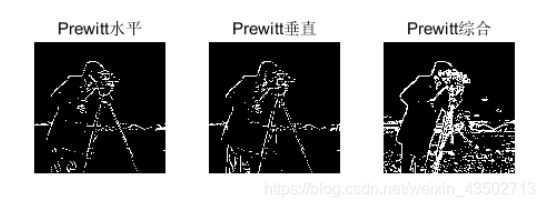
Prewitt算子进行边缘检测
//Prewitt水平、垂直算子
%Prewitt水平算子函数
function [img_end] = Prewitt(img,PrewittThreshold)
[m,n]=size(img);
img_end=img;
for i=2:m-1
for j=2:n-1
temp=abs((img(i-1,j-1)+img(i-1,j)+img(i-1,j+1))-(img(i+1,j-1)+img(i+1,j)+img(i+1,j+1)));%水平模板
if(temp>PrewittThreshold)
img_end(i,j)=255;
else
img_end(i,j)=0;
end
end
end
end
%Prewitt垂直算子函数
function [img_end] = PrewittChuizhi(img,PrewittThreshold)
[m,n]=size(img);
img_end=img;
for i=2:m-1
for j=2:n-1
temp=abs((img(i-1,j-1)+img(i,j-1)+img(i+1,j-1))-(img(i+1,j+1)+img(i+1,j)+img(i+1,j-1)));%垂直模板
img2(i,j)=temp;
if(temp>PrewittThreshold)
img_end(i,j)=255;
else
img_end(i,j)=0;
end
end
end
end
%%自写函数实现边缘检测
img=imread('Cameraman.bmp');
PrewittThreshold=20;
img_end=Prewitt(img,PrewittThreshold);
figure,subplot(131), imshow(img_end),title('Prewitt水平');
PrewittThreshold=9;
img_end2=PrewittChuizhi(img,PrewittThreshold);
subplot(132), imshow(img_end2),title('Prewitt垂直');
//Prewitt综合算子
PrewittThreshold=100;
[m,n]=size(img);
img=double(img);
img_end3=img;
for i=2:m-1
for j=2:n-1
temp=abs((img(i-1,j-1)+img(i-1,j)+img(i-1,j+1))-(img(i+1,j-1)+img(i+1,j)+img(i+1,j+1))+(img(i-1,j-1)+img(i,j-1)+img(i+1,j-1))-(img(i+1,j+1)+img(i+1,j)+img(i+1,j-1)));
img1(i,j)=temp;
if(temp>PrewittThreshold)
img_end3(i,j)=255;
else
img_end3(i,j)=0;
end
end
end
subplot(133),
imshow(img_end3),title('Prewitt综合');
//Matlab自带函数
%%自带函数
img_end4=edge(img,'Prewitt',0.09,'horizontal');
figure,subplot(131),imshow(img_end4),title('Prewitt水平');
img_end5=edge(img,'Prewitt',0.09,'vertical');
subplot(132),imshow(img_end5),title('Prewitt垂直');
img_end6=edge(img,'Prewitt',0.09);
subplot(133),imshow(img_end6),title('Prewitt综合');
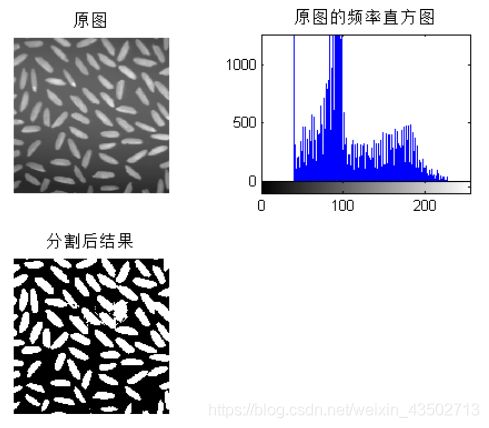
自动单阈值分割
利用直方图人工指定阈值对rice进行自动单阈值分割;
img = imread('rice.tif');
%img = double(img);
figure;
subplot(221),imshow(img),title('原图');
subplot(222),imhist(img,256),title('原图的频率直方图');
img1 = img;
[m,n] = size(img1);
for i = 1:m
for j = 1:n
if img1(i,j)>100 && img1(i,j)<255
img1(i,j)=1;
else
img1(i,j)=0;
end
end
end
subplot(223),imshow(double(img1)),title('分割后结果');
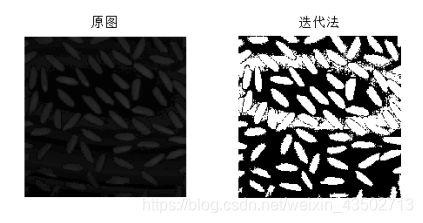
迭代法进行单阈值分割
img = imread('rice.gif');
figure;
subplot(121);
imshow(img);
title('原图')
T = mean2(img);
flag = false;
i = 0;
% while循环进行迭代
while ~flag
r1 = find(img<=T); %小于阈值的部分
r2 = find(img>T); %大于阈值的部分
Tnew = (mean(img(r1)) + mean(img(r2))) / 2;
flag = abs(Tnew - T) < 1;
T = Tnew;
i = i+1;
end
img(r1) = 0; %小于阈值=0
img(r2) = 1; %大于阈值=1
subplot(122);
imshow(img,[]);
title('迭代法')
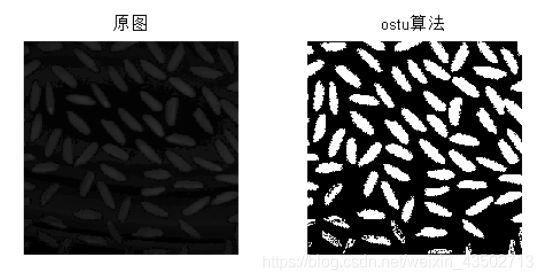
OSTU算法
img=imread('rice.gif');
figure;
subplot(121);
imshow(img);
title('原图')
omiga_o=mean(mean(img));
elem=tabulate(img(:));
[m,n]=size(img);
for i=1:size(elem,1)
pa=sum(elem(1:i,2));
pb=m*n-pa;
omiga_a=sum(elem(1:i,1).*(elem(1:i,2)/pa));
omiga_b=sum(elem(i+1:end,1).*(elem(i+1:end,2)/pb));
temp=(pa*power(omiga_a-omiga_o,2)+pb*power(omiga_b-omiga_o,2))/(m*n);
delta(i)=temp;
end
[Y,U]=max(delta);
img(img<U)=0;img(img>U)=255;
subplot(122);
imshow(img);
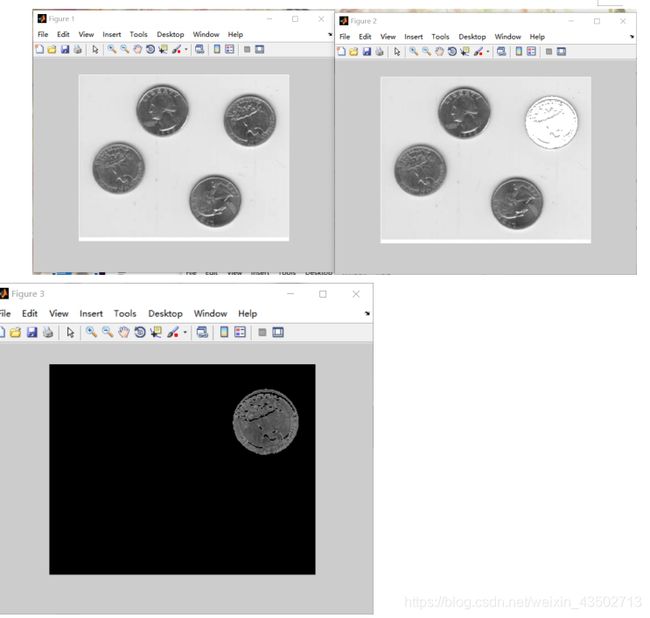
区域生长算法
利用区域生长算法对money.jpg进行分割。
BW=imread('money.jpg');
figure,imshow(BW);
I = im2double(BW);% 做成从0-255变成0到1之间 变成double类型好计算
%x=450; y=450;
[y1,x1]=getpts;%内部取种子点
x=round(x1); %横坐标取整
y=round(y1); %纵坐标取整
%J = regiongrowing(I,x1,y1,0.17);
%%%%%%%%%%%%%%%regiongrowing算法%%%%%%%%%%%%%%%%%%%
%一边分割一边生长,连续区域均值
reg_maxdist=0.17;%设定生长准则
J = zeros(size(I)); % Output,要分割的图像 0矩阵,跟原图像一样大
%J=0,J=1,入栈,纳入候选点 J=2 可分割
Isizes = size(I); % Dimensions of input image
reg_mean = I(x,y); % 被分割出来的区域灰度均值 目前只有一个点,则就是这个点的 The mean of the segmented region
reg_size = 1; % 被分割出来的区域所包含像素点的个数 Number of pixels in region
neg_free = 10000;%neg_free 栈可存点的个数
neg_pos=0;% neg_free 栈下标
neg_list = zeros(neg_free,3); %栈 存生长点的候选点 存进去的是横纵坐标和灰度值
%当前只有一个
pixdist=0; %灰度差 放在候选区域里面的 即栈里的 ,跟分割好的区域的灰度均值的灰度差,若灰度差是最小的那一个,则可生长 Distance of the region newest pixel to the regio mean
% Neighbor locations (footprint)
neigb=[-1 0; 1 0; 0 -1;0 1];%四邻域
%终止条件:被分割出来的像素点的个数>总像素数 或 灰度差大于生长准则
while(pixdist<reg_maxdist&®_size<numel(I))
% Add new neighbors pixels
for j=1:4,
% Calculate the neighbour coordinate
xn = x +neigb(j,1); yn = y +neigb(j,2);
% Check if neighbour is inside or outside the image
%%判断是否越界 要在图像内部
ins=(xn>=1)&&(yn>=1)&&(xn<=Isizes(1))&&(yn<=Isizes(2));
% Add neighbor if inside and not already part of the segmented area
%若没有越界且还没有对此点进行生长
if(ins&&(J(xn,yn)==0))
%将此点存入栈
neg_pos = neg_pos+1;%开始坐标从1开始
neg_list(neg_pos,:) = [xn yn I(xn,yn)];%追加到栈的尾部
J(xn,yn)=1;%(xn,yn)进栈
end
end
% Add a new block of free memory
%检查一下栈是不是被占满了,若被占满,则扩容
if(neg_pos+10>neg_free), neg_free=neg_free+10000; neg_list((neg_pos+1):neg_free,:)=0; end
% Add pixel with intensity nearest to the mean of the region, to the region
%找出满足生长条件的点
dist = abs(neg_list(1:neg_pos,3)-reg_mean);%返回【栈里(1-neg_pos)的像素灰度值】与【被分割出来的区域均灰度值】的差的绝对值 数组
%min用两个变量来承接,则返回的是[值,索引]
[pixdist, index] = min(dist);%找到最小的那一个
J(x,y)=2;%找出被分割的点,赋2
reg_size=reg_size+1;%被分割出来的像素点个数加一
% Calculate the new mean of the region
reg_mean= (reg_mean*reg_size + neg_list(index,3))/(reg_size+1);%更新reg_mean
% Save the x and y coordinates of the pixel (for the neighbour add proccess)
%种子点重新换了 把刚被分割出来的点作为种子点
x = neg_list(index,1);
y = neg_list(index,2);
% Remove the pixel from the neighbour (check) list
%清除
neg_list(index,:)=neg_list(neg_pos,:); %将栈顶元素赋值给种子点位置 (种子点已经是种子点了,就可以出栈了)
neg_pos=neg_pos-1;
end
J=J>1;%逻辑运算 把已经分割出来的点变为真,其他变为假
figure, imshow(I+J);
[n,m]=size(BW);
img=zeros(size(BW));
for i=1:n
for j=1:m
if(J(i,j))
img(i,j)=I(i,j);
end
end
end
figure,imshow(img);