并联机器人结构分析与领域应用
并联机器人早在20世纪的90年代就已经崭露头角,具有刚度高、速度快、柔性强、重量轻等优点,是工业机器人的新生代力量。并联机器人与串联机器人一起构成了工业机器人的重要部分。在食品、医药、电子等轻工业中应用最为广泛,在物料的搬运、包装、分拣等方面具有很大的优势。
一、结构概述
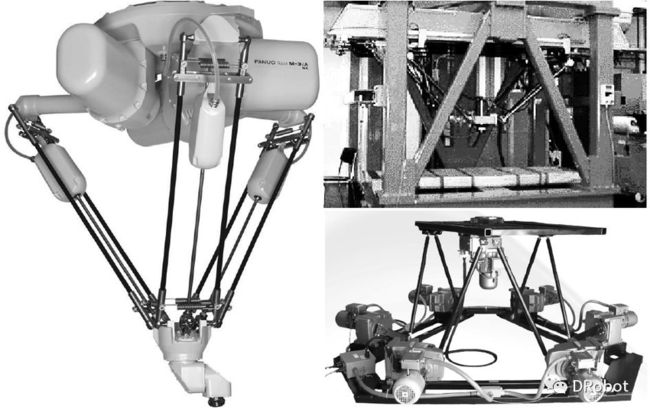
并联型机器人是将各个关节通过连杆连在一起,形成并联结构,运动路径呈圆弧型。由于不需要维护链条的稳定性,因此并联型机器人可以实现更高速度、更大负载和更高精度的运动。尤其在需要进行高精度、高速度的微操作时,更是非常适用。
并联型机器人的结构形式比较复杂,但也可以根据运动学参数进行简化。按照自由度划分,分为二自由度并联机构、三自由度并联机构和六自由度并联机构三种类型。并联机器人的自由度可以决定机器人的运动能力,可以根据具体需求来选择不同自由度的机器人。
二自由度并联机构在并联机器人中是较为基础的一种结构形式。其结构较为简单,但可以实现平面或球面的定位。三自由度并联机构则可以实现更复杂的运动任务,例如曲线描迹、轨道跟踪等。六自由度并联机构则是目前最为先进的一种结构形式,可以实现机器人的所有运动自由度,从而实现更加复杂的任务。同时,六自由度并联机构的结构形式也相对复杂,需要采用更为精巧的控制方法来实现。
二、领域应用
并联机器人作为一种新兴的机器人结构,拥有高精度、大负载、灵活性强等优点,在诸多领域都有着广泛的应用。以下是并联机器人的应用方向和相关案例。
2.1. 工业制造
工业制造是并联机器人最主要的应用领域之一。在工业制造中,由于对产品质量和精度的要求越来越高,因此需要使用高精度、高速度、大负载的机器人来完成生产过程中的各项任务。同时,由于生产线中的空间限制和生产效率的要求,也需要机器人的灵活性和可重构性来适应生产环境的变化。
2.1.1 焊接
在汽车、电子、船舶等行业中,焊接是一个非常重要的环节。并联机器人可以实现高精度、高效率的焊接过程,并能够适应不同的工件形状和大小。例如,德国奔驰公司采用了ABB公司的IRB7600型并联机器人,在其汽车生产线中完成汽车车身的点焊和弧焊任务。该机器人具有6个自由度和极高的速度和精度,并可以根据焊接工件的形状和大小进行自适应调整,从而实现最佳的焊接效果。

2.1.2 组装
在一些电子、机械等行业中,组装是一个重要的生产环节。并联机器人可以实现高精度、高速度的组装任务,例如电子产品的组装、汽车发动机的组装等。同时,由于并联机器人可以根据不同工件的形状和大小进行自适应调整,因此可以适应不同的组装环境和条件。例如,日本富士通公司采用了三菱电机公司的MELFA FR系列并联机器人,实现了手机和平板电脑等电子产品的组装,其精度和速度均优于传统的组装方法。
2.1.3 加工
在一些航空、船舶和机械制造等行业中,需要使用高精度、大负载的机器人来完成加工任务。并联机器人具有较高的精度和负载能力,可以实现复杂零件的加工任务。例如,德国西门子公司采用了斯图加特大学的PARM(Parallel Robot Machine)并联机器人,实现了铝合金飞机零部件的高精度铣削,取得了较好的加工效果。
2.2. 医疗卫生
在医疗卫生领域中,由于人类手臂的精度和力量受到限制,因此需要使用机器人来完成一些特殊的医疗任务。同时,机器人还可以减少医护人员的劳动强度和操作风险,提高医疗服务的质量和效率。
2.2.1 手术
机器人手术是一种利用机器人技术来实现微创手术的方法。并联机器人可以具备较高的精度和灵活性,而且可以通过远程控制实现手术,减少人类医生的手术次数和操作风险。例如,美国Intuitive Surgical公司的达芬奇机器人就是一种常用的手术机器人,它可以进行胃肠道、妇科、泌尿等多个手术领域的手术,并且取得了良好的效果。
2.2.2 康复
机器人康复是一种利用机器人技术来帮助身体有缺陷或行动不便的人恢复运动功能的方法。并联机器人可以过精准的力度和速度来实现对患者的康复训练,使患者的身体功能得到有效的恢复和改善。例如,中国的RehabRobotics公司开发了一种并联机器人康复系统,可以利用机器人手臂对患者进行物理治疗和康复训练,该系统已经在一些医院得到了应用。
2.3. 服务
在服务领域中,机器人技术可以使得服务质量得到提高,并且可以节约人力成本。并联机器人具有较高的灵活性和可重构性,可以适应不同的服务场合和条件。
2.3.1 清洁
机器人清洗是一种利用机器人技术来实现清洁任务的方法。并联机器人可以具备较高的精度和灵活性,可以在不同的清洁场合下进行作业。例如,德国Kärcher公司生产的RC 3000机器人就是一种常用的地面清洁机器人,它可以在商场、医院、车站等场合实现地面的自动化清洁,节约了大量的人力和时间成本。
2.3.2 安保
机器人安保是一种利用机器人技术来实现安保任务的方法。并联机器人可以利用多种传感器和装置,实现对安全区域的监控和控制。例如,美国Knightscope公司生产的K5机器人就是一种常用的安保机器人,它可以通过多个传感器来实现对人员、车辆等的监控和巡逻任务。
总之,随着机器人技术的日益发展和应用场景的不断增多,未来并联机器人的应用领域也将进一步扩展和深化,同时也会给人们的生产生活带来更多便利和创新。
三、总结
综上所述,目前并联机器人的研究依然处于不断发展和完善的阶段。未来的研究方向主要包括:进一步提高运动学和动力学分析的精度和可靠性,建立更为精准的力学模型;开发更加智能和高效的控制方法,提高机器人的自适应性和智能化水平;扩大机器人的应用领域,为人类创造更大的社会价值。
更多信息请关注:DRobot