ros手柄控制机器人小车(一)
实验室新购置了一辆机器人,师兄们做好了键盘控制机器人运行,但总拿着电脑太麻烦了,就让我做一个手柄控制机器人,随便实践一下ros开发能力.
首先尝试用手柄控制海龟.
主要参考文章:文章一,文章二,文章三
一.手柄连接测试
首先测试手柄能不能正常连接到电脑,系统是ubuntu18.04,
在终端输入
ls /dev/input
出现了js0,就代表手柄可以正常连接.
然后继续输入
sudo jstest /dev/input/js0来测试一下连接的情况,结果发现报错
![]()
应该是没有安装,安装一下jstest,就好了
发现换源,发现还是无法定位,不是重点,不管了
换了另外一个命令,来测试手柄的连接情况,没有的话,安装一下
sudo apt-get install jstest-gtk然后发现jstest可以用了...
首先使用
sudo jstest /dev/input/js0显示
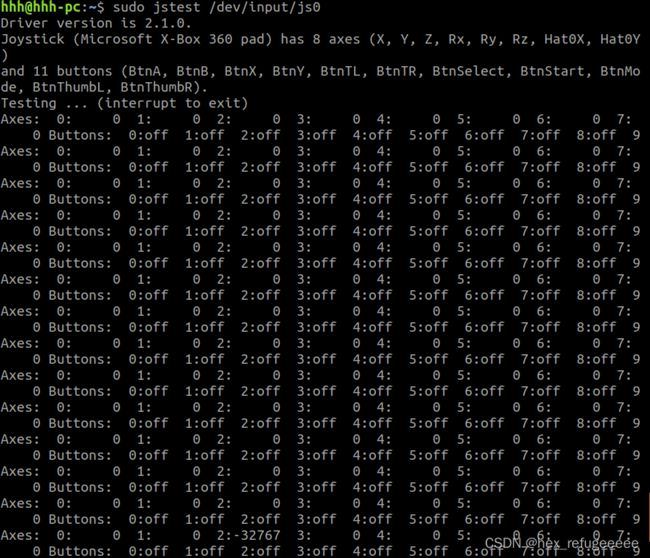
显示有8个按钮可以使用.
然后使用jstest-gtk命令,这个可视化更好
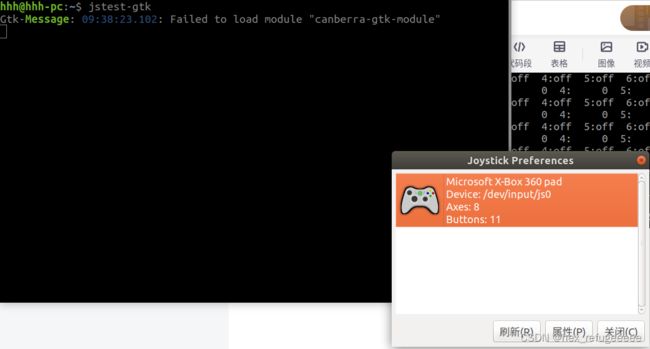
点击属性,可视化显示更好.
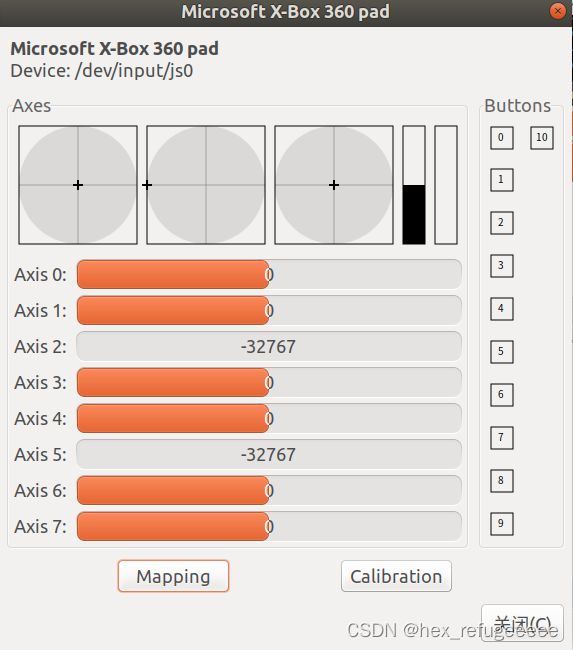
这里可以直观的显示不同按键之间的序号.
二.安装joy相关的包
sudo apt-get install ros-melodic-joy
sudo apt-get install ros-melodic-joystick-drivers然后运行查看能否使用
roscore
rosrun joy joy_node再查看topic
rostopic list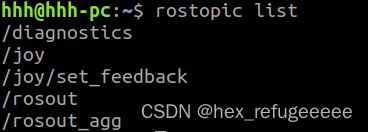
rostopic echo /joy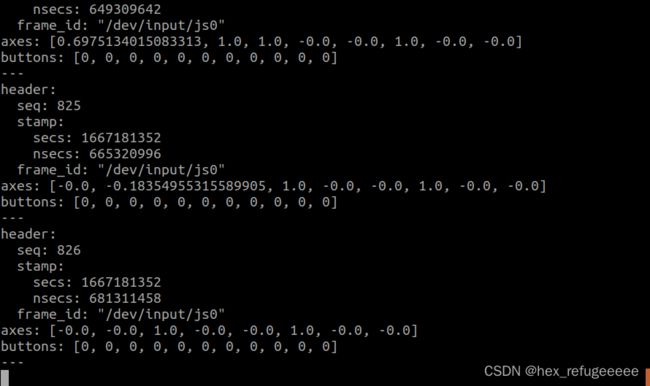
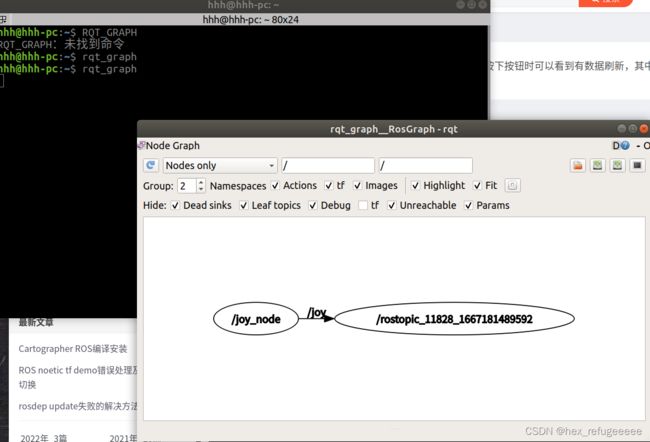
一切正常,开始用小海龟测试
三.手柄控制海龟
查看海龟消息格式
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_telekey_op
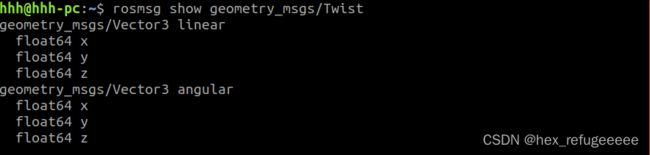
rostopic type /turtle1/cmd_vel![]()
查看一下消息的详细输出
然后运行控制海龟的运行,再用rostopic echo 查看相关消息
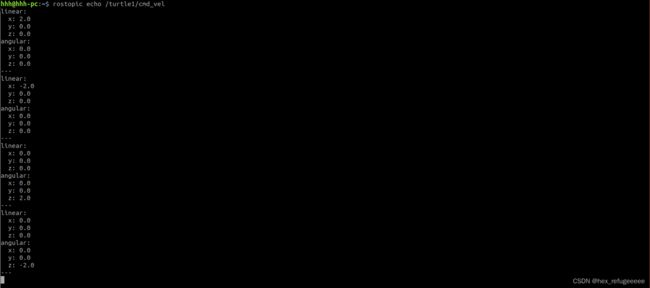
分别对应上下左右 ,可以发现一般只有x与z有转动,这对应了ros中的右手坐标系.具体可以在网上查查资料
通过上面的分析,手柄控制海龟主要分两步:
1.订阅/joy话题,获取手柄输入的数据
2.通过/turtle1/cmd_vel发布消息来控制海龟
创建工作空间和依赖包
mkdir -p robot_control/src && cd robot_control/src
catkin_create_pkg ros_handle_control roscpp rospy geometry_msgs sensor_msgs在src目录下创建teleop_turtle.cpp
#include
#include
#include
class TeleopTurtle
{
public:
TeleopTurtle();
private:
// 处理手柄发送过来的信息
void callback(const sensor_msgs::Joy::ConstPtr &joy);
// 实例化ROS句柄
ros::NodeHandle nh;
// 定义订阅者对象,用来订阅手柄发送的数据
ros::Subscriber sub;
// 定义发布者对象,用来将手柄数据发布到乌龟控制话题上
ros::Publisher pub;
// 用来接收launch文件中设置的参数,绑定手柄摇杆、轴的映射
int axis_linear, axis_angular;
};
TeleopTurtle::TeleopTurtle()
{
// 从参数服务器读取的参数
nh.param("axis_linear", axis_linear, 1);
nh.param("axis_angular", axis_angular, 2);
pub = nh.advertise("/turtle1/cmd_vel", 1);
sub = nh.subscribe("joy", 10, &TeleopTurtle::callback, this);
}
void TeleopTurtle::callback(const sensor_msgs::Joy::ConstPtr &joy)
{
geometry_msgs::Twist vel;
// 将手柄摇杆轴拨动时值的输出赋值给乌龟的线速度和角速度
vel.linear.x = joy->axes[axis_linear];
vel.angular.z = joy->axes[axis_angular];
ROS_INFO("当前线速度为:%.3lf ; 角速度为:%.3lf", vel.linear.x, vel.angular.z);
pub.publish(vel);
}
int main(int argc, char **argv)
{
// 设置编码
setlocale(LC_ALL, "");
// 初始化ROS节点
ros::init(argc, argv, "teleop_turtle");
TeleopTurtle teleopTurtle;
ros::spin();
return 0;
}
创建launch文件夹,创建demo.launch文件
然后编译运行
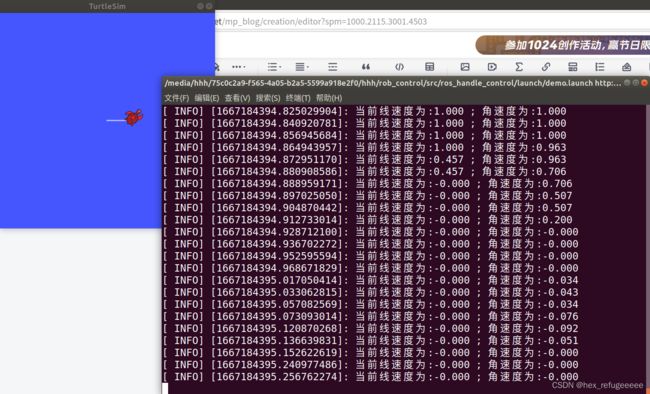
可以通过手柄控制海龟的前进旋转,但按键不行,需要在进行进一步的改进,该经的方向应该是参数服务器,和关于joy控制按键相关.下一篇搞这个