- 一、导言
- 1.1 为何要了解GPU?
- 1.2 内容要点
- 1.3 带着问题阅读
- 二、GPU概述
- 2.1 GPU是什么?
- 2.2 GPU历史
- 2.2.1 NV GPU发展史
- 2.2.2 NV GPU架构发展史
- 2.3 GPU的功能
- 三、GPU物理架构
- 3.1 GPU宏观物理结构
- 3.2 GPU微观物理结构
- 3.2.1 NVidia Tesla架构
- 3.2.2 NVidia Fermi架构
- 3.2.3 NVidia Maxwell架构
- 3.2.4 NVidia Kepler架构
- 3.2.5 NVidia Turing架构
- 3.3 GPU架构的共性
- 四、GPU运行机制
- 4.1 GPU渲染总览
- 4.2 GPU逻辑管线
- 4.3 GPU技术要点
- 4.3.1 SIMD和SIMT
- 4.3.2 co-issue
- 4.3.3 if - else语句
- 4.3.4 Early-Z
- 4.3.5 统一着色器架构(Unified shader Architecture)
- 4.3.6 像素块(Pixel Quad)
- 4.4 GPU资源机制
- 4.4.1 内存架构
- 4.4.2 GPU Context和延迟
- 4.4.3 CPU-GPU异构系统
- 4.4.4 GPU资源管理模型
- 4.4.5 CPU-GPU数据流
- 4.4.6 显像机制
- 4.5 Shader运行机制
- 4.6 利用扩展例证
- 五、总结
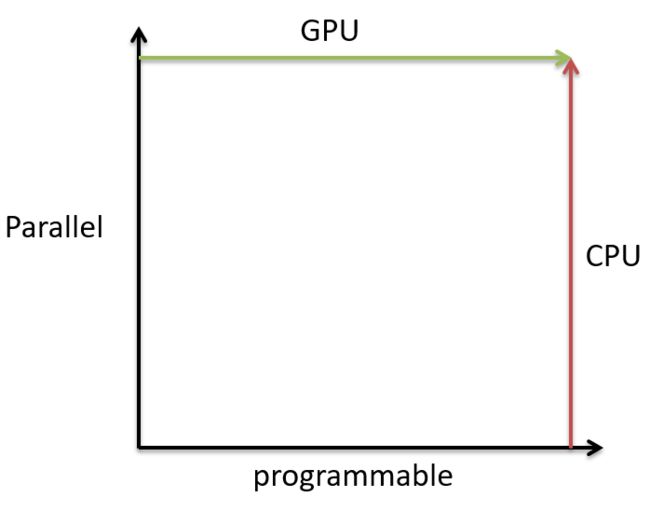
- 5.1 CPU vs GPU
- 5.2 渲染优化建议
- 5.3 GPU的未来
- 5.4 结语
- 特别说明
- 参考文献
一、导言
对于大多数图形渲染开发者,GPU是既熟悉又陌生的部件,熟悉的是每天都需要跟它打交道,陌生的是GPU就如一个黑盒,不知道其内部硬件架构,更无从谈及其运行机制。
本文以NVIDIA作为主线,将试图全面且深入地剖析GPU的硬件架构及运行机制,主要涉及PC桌面级的GPU,不会覆盖移动端、专业计算、图形工作站级别的GPU。
若要通读本文,要求读者有一定图形学的基础,了解GPU渲染管线,最好写过HLSL、GLSL等shader代码。
1.1 为何要了解GPU?
了解GPU硬件架构和理解运行机制,笔者认为好处多多,总结出来有:
- 理解GPU其物理结构和运行机制,GPU由黑盒变白盒。
- 更易找出渲染瓶颈,写出高效率shader代码。
- 紧跟时代潮流,了解最前沿渲染技术!
- 技多不压身!
1.2 内容要点
本文的内容要点提炼如下:
- GPU简介、历史、特性。
- GPU硬件架构。
- GPU和CPU的协调调度机制。
- GPU缓存结构。
- GPU渲染管线。
- GPU运行机制。
- GPU优化技巧。
1.3 带着问题阅读
适当带着问题去阅读技术文章,通常能加深理解和记忆,阅读本文可带着以下问题:
1、GPU是如何与CPU协调工作的?
2、GPU也有缓存机制吗?有几层?它们的速度差异多少?
3、GPU的渲染流程有哪些阶段?它们的功能分别是什么?
4、Early-Z技术是什么?发生在哪个阶段?这个阶段还会发生什么?会产生什么问题?如何解决?
5、SIMD和SIMT是什么?它们的好处是什么?co-issue呢?
6、GPU是并行处理的么?若是,硬件层是如何设计和实现的?
7、GPC、TPC、SM是什么?Warp又是什么?它们和Core、Thread之间的关系如何?
8、顶点着色器(VS)和像素着色器(PS)可以是同一处理单元吗?为什么?
9、像素着色器(PS)的最小处理单位是1像素吗?为什么?会带来什么影响?
10、Shader中的if、for等语句会降低渲染效率吗?为什么?
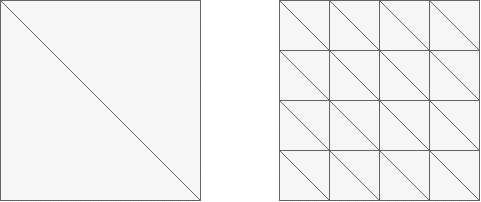
11、如下图,渲染相同面积的图形,三角形数量少(左)的还是数量多(右)的效率更快?为什么?
12、GPU Context是什么?有什么作用?
13、造成渲染瓶颈的问题很可能有哪些?该如何避免或优化它们?
如果阅读完本文,能够非常清晰地回答以上所有问题,那么,恭喜你掌握到本文的精髓了!
二、GPU概述
2.1 GPU是什么?
GPU全称是Graphics Processing Unit,图形处理单元。它的功能最初与名字一致,是专门用于绘制图像和处理图元数据的特定芯片,后来渐渐加入了其它很多功能。

NVIDIA GPU芯片实物图。
我们日常讨论GPU和显卡时,经常混为一谈,严格来说是有所区别的。GPU是显卡(Video card、Display card、Graphics card)最核心的部件,但除了GPU,显卡还有扇热器、通讯元件、与主板和显示器连接的各类插槽。
对于PC桌面,生产GPU的厂商主要有两家:
-
NVIDIA:英伟达,是当今首屈一指的图形渲染技术的引领者和GPU生产商佼佼者。NVIDIA的产品俗称N卡,代表产品有GeForce系列、GTX系列、RTX系列等。

-
AMD:既是CPU生产商,也是GPU生产商,它家的显卡俗称A卡。代表产品有Radeon系列。

当然,NVIDIA和AMD也都生产移动端、图形工作站类型的GPU。此外,生产移动端显卡的厂商还有ARM、Imagination Technology、高通等公司。
2.2 GPU历史
GPU自从上世纪90年代出现雏形以来,经过20多年的发展,已经发展成不仅仅是渲染图形这么简单,还包含了数学计算、物理模拟、AI运算等功能。
2.2.1 NV GPU发展史
以下是GPU发展节点表:
-
1995 – NV1

NV1的渲染画面及其特性。
-
1997 – Riva 128 (NV3), DX3
-
1998 – Riva TNT (NV4), DX5
- 32位颜色, 24位Z缓存, 8位模板缓存
- 双纹理, 双线性过滤
- 每时钟2像素 (2 ppc)
-
1999 - GeForce 256(NV10)
- 固定管线,支持DirectX 7.0
- 硬件T&L(Transform & lighting,坐标变换和光照)
- 立方体环境图(Cubemaps)
- DOT3 – bump mapping
- 2倍各向异性过滤
- 三线性过滤
- DXT纹理压缩
- 4ppc
- 引入“GPU”术语

NV10的渲染画面及其特性。
-
2001 - GeForce 3
- DirectX 8.0
- Shader Model 1.0
- 可编程渲染管线
- 顶点着色器
- 像素着色器
- 3D纹理
- 硬件阴影图
- 8倍各向异性过滤
- 多采样抗锯齿(MSAA)
- 4 ppc

NV20的渲染画面及其特性。
-
2003 - GeForce FX系列(NV3x)
- DirectX 9.0
- Shader Model 2.0
- 256顶点操作指令
- 32纹理 + 64算术像素操作指令
- Shader Model 2.0a
- 256顶点操作指令
- 512像素操作指令
- 着色语言
- HLSL
- CGSL
- GLSL

NV30的渲染画面及其特性。
-
2004 - GeForce 6系列 (NV4x)
-
DirectX 9.0c
-
Shader Model 3.0
-
动态流控制
- 分支、循环、声明等
-
顶点纹理读取
-
高动态范围(HDR)
- 64位渲染纹理(Render Target)
- FP16*4 纹理过滤和混合

-
NV40的渲染画面及其特性。
-
2006 - GeForce 8系列 (G8x)
-
DirectX 10.0
-
Shader Model 4.0
- 几何着色器(Geometry Shaders)
- 没有上限位(No caps bits)
- 统一的着色器(Unified Shaders)
-
Vista系统全新驱动
-
基于GPU计算的CUDA问世
-
GPU计算能力以GFLOPS计量。

NV G80的渲染画面及其特性。
-
-
2010 - GeForce 405(GF119)
-
DirectX 11.0
- 曲面细分(Tessellation)
- 外壳着色器(Hull Shader)
- 镶嵌单元(tessellator)
- 域着色器(Domain Shader)
- 计算着色器(Compute Shader)
- 支持Stream Output

DirectX 11的渲染管线。
- 多线程支持
- 改进的纹理压缩
- 曲面细分(Tessellation)
-
Shader Model 5.0
- 更多指令、存储单元、寄存器
- 面向对象着色语言
- 曲面细分
- 计算着色器
-
-
2014 - GeForceGT 710(GK208)
- DirectX 12.0
- 轻量化驱动层
- 硬件级多线程渲染支持
- 更完善的硬件资源管理
- DirectX 12.0
-
2016 - GeForceGTX 1060 6GB
- 首次支持RTX和DXR技术,即支持光线追踪
- 引入RT Core(光线追踪核心)

支持RTX光线追踪的显卡列表。
-
2018 - TITAN RTX(TU102)
-
DirectX 12.1,OpenGL 4.5
-
6GPC,36TPC,72SM,72RT Core,...
-
8K分辨率,1770MHz主频,24G显存,384位带宽

-
从上面可以看出来,GPU硬件是伴随着图形API标准、游戏一起发展的,并且它们形成了相互相成、相互促进的良性关系。
2.2.2 NV GPU架构发展史
众所周知,CPU的发展符合摩尔定律:每18个月速度翻倍。
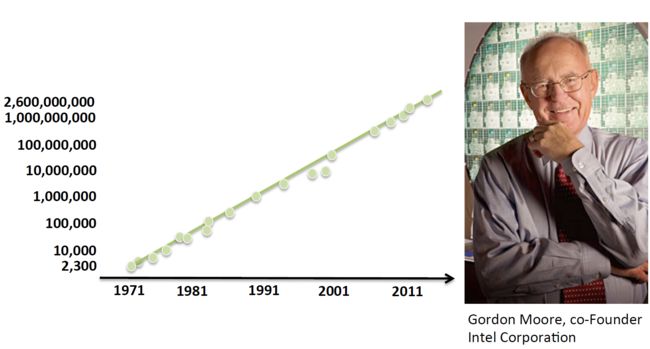
处理芯片晶体管数量符合摩尔定律,图右是摩尔本人,Intel的创始人
而NVIDIA创始人黄仁勋在很多年前曾信誓旦旦地说,GPU的速度和功能要超越摩尔定律,每6个月就翻一倍。NV的GPU发展史证明,他确实做到了!GPU的提速幅率远超CPU:
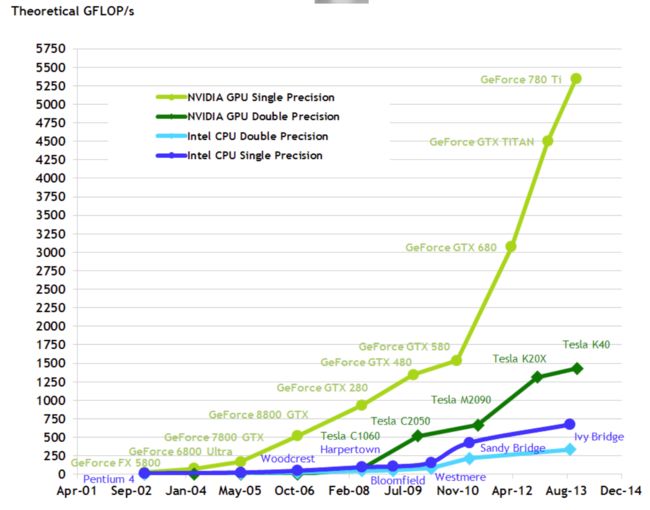
NVIDIA GPU架构历经多次变革,从起初的Tesla发展到最新的Turing架构,发展史可分为以下时间节点:
-
2008 - Tesla
Tesla最初是给计算处理单元使用的,应用于早期的CUDA系列显卡芯片中,并不是真正意义上的普通图形处理芯片。
-
2010 - Fermi
Fermi是第一个完整的GPU计算架构。首款可支持与共享存储结合纯cache层次的GPU架构,支持ECC的GPU架构。
-
2012 - Kepler
Kepler相较于Fermi更快,效率更高,性能更好。
-
2014 - Maxwell
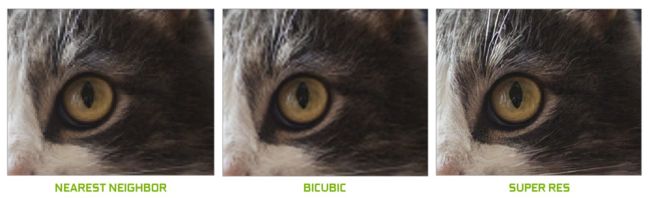
其全新的立体像素全局光照 (VXGI) 技术首次让游戏 GPU 能够提供实时的动态全局光照效果。基于 Maxwell 架构的 GTX 980 和 970 GPU 采用了包括多帧采样抗锯齿 (MFAA)、动态超级分辨率 (DSR)、VR Direct 以及超节能设计在内的一系列新技术。
-
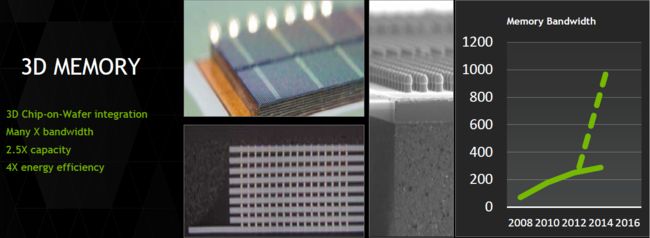
2016 - Pascal
Pascal 架构将处理器和数据集成在同一个程序包内,以实现更高的计算效率。1080系列、1060系列基于Pascal架构
-
2017 - Volta
Volta 配备640 个Tensor 核心,每秒可提供超过100 兆次浮点运算(TFLOPS) 的深度学习效能,比前一代的Pascal 架构快5 倍以上。
-
2018 - Turing
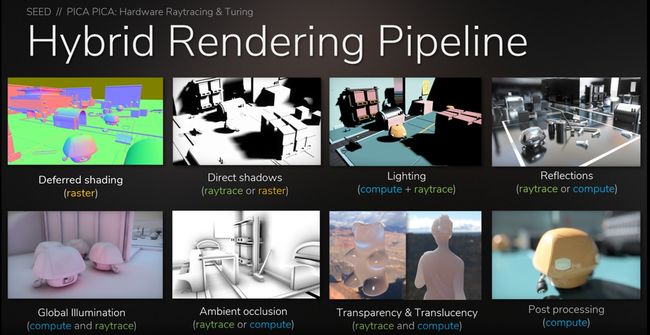
Turing 架构配备了名为 RT Core 的专用光线追踪处理器,能够以高达每秒 10 Giga Rays 的速度对光线和声音在 3D 环境中的传播进行加速计算。Turing 架构将实时光线追踪运算加速至上一代 NVIDIA Pascal™ 架构的 25 倍,并能以高出 CPU 30 多倍的速度进行电影效果的最终帧渲染。2060系列、2080系列显卡也是跳过了Volta直接选择了Turing架构。
下图是部分GPU架构的发展历程:

2.3 GPU的功能
现代GPU除了绘制图形外,还担当了很多额外的功能,综合起来如下几方面:
-
图形绘制。
这是GPU最传统的拿手好戏,也是最基础、最核心的功能。为大多数PC桌面、移动设备、图形工作站提供图形处理和绘制功能。
-
物理模拟。
GPU硬件集成的物理引擎(PhysX、Havok),为游戏、电影、教育、科学模拟等领域提供了成百上千倍性能的物理模拟,使得以前需要长时间计算的物理模拟得以实时呈现。
-
海量计算。
计算着色器及流输出的出现,为各种可以并行计算的海量需求得以实现,CUDA就是最好的例证。
-
AI运算。
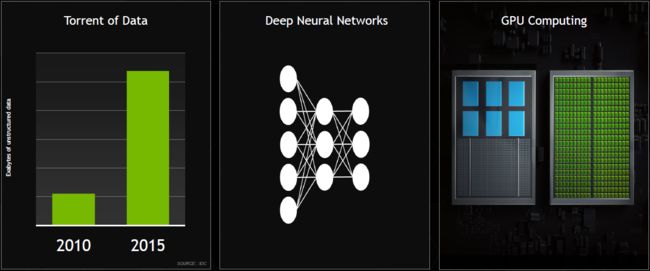
近年来,人工智能的崛起推动了GPU集成了AI Core运算单元,反哺AI运算能力的提升,给各行各业带来了计算能力的提升。
-
其它计算。
音视频编解码、加解密、科学计算、离线渲染等等都离不开现代GPU的并行计算能力和海量吞吐能力。
三、GPU物理架构
3.1 GPU宏观物理结构
由于纳米工艺的引入,GPU可以将数以亿记的晶体管和电子器件集成在一个小小的芯片内。从宏观物理结构上看,现代大多数桌面级GPU的大小跟数枚硬币同等大小,部分甚至比一枚硬币还小(下图)。

高通骁龙853显示芯片比硬币还小
当GPU结合散热风扇、PCI插槽、HDMI接口等部件之后,就组成了显卡(下图)。
显卡不能独立工作,需要装载在主板上,结合CPU、内存、显存、显示器等硬件设备,组成完整的PC机。

搭载了显卡的主板。
3.2 GPU微观物理结构
GPU的微观结构因不同厂商、不同架构都会有所差异,但核心部件、概念、以及运行机制大同小异。下面将展示部分架构的GPU微观物理结构。
3.2.1 NVidia Tesla架构

Tesla微观架构总览图如上。下面将阐述它的特性和概念:
-
拥有7组TPC(Texture/Processor Cluster,纹理处理簇)
-
每个TPC有两组SM(Stream Multiprocessor,流多处理器)
-
每个SM包含:
- 6个SP(Streaming Processor,流处理器)
- 2个SFU(Special Function Unit,特殊函数单元)
- L1缓存、MT Issue(多线程指令获取)、C-Cache(常量缓存)、共享内存
-
除了TPC核心单元,还有与显存、CPU、系统内存交互的各种部件。
3.2.2 NVidia Fermi架构
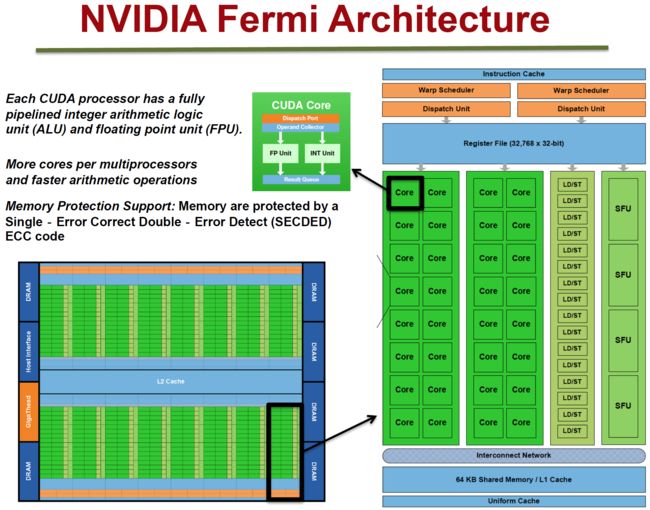
Fermi架构如上图,它的特性如下:
-
拥有16个SM
-
每个SM:
- 2个Warp(线程束)
- 两组共32个Core
- 16组加载存储单元(LD/ST)
- 4个特殊函数单元(SFU)
-
每个Warp:
- 16个Core
- Warp编排器(Warp Scheduler)
- 分发单元(Dispatch Unit)
-
每个Core:
- 1个FPU(浮点数单元)
- 1个ALU(逻辑运算单元)
3.2.3 NVidia Maxwell架构

采用了Maxwell的GM204,拥有4个GPC,每个GPC有4个SM,对比Tesla架构来说,在处理单元上有了很大的提升。
3.2.4 NVidia Kepler架构

Kepler除了在硬件有了提升,有了更多处理单元之外,还将SM升级到了SMX。SMX是改进的架构,支持动态创建渲染线程(下图),以降低延迟。

3.2.5 NVidia Turing架构

上图是采纳了Turing架构的TU102 GPU,它的特点如下:
-
6 GPC(图形处理簇)
-
36 TPC(纹理处理簇)
-
72 SM(流多处理器)
-
每个GPC有6个TPC,每个TPC有2个SM
-
4,608 CUDA核
-
72 RT核
-
576 Tensor核
-
288 纹理单元
-
12x32位 GDDR6内存控制器 (共384位)
单个SM的结构图如下:
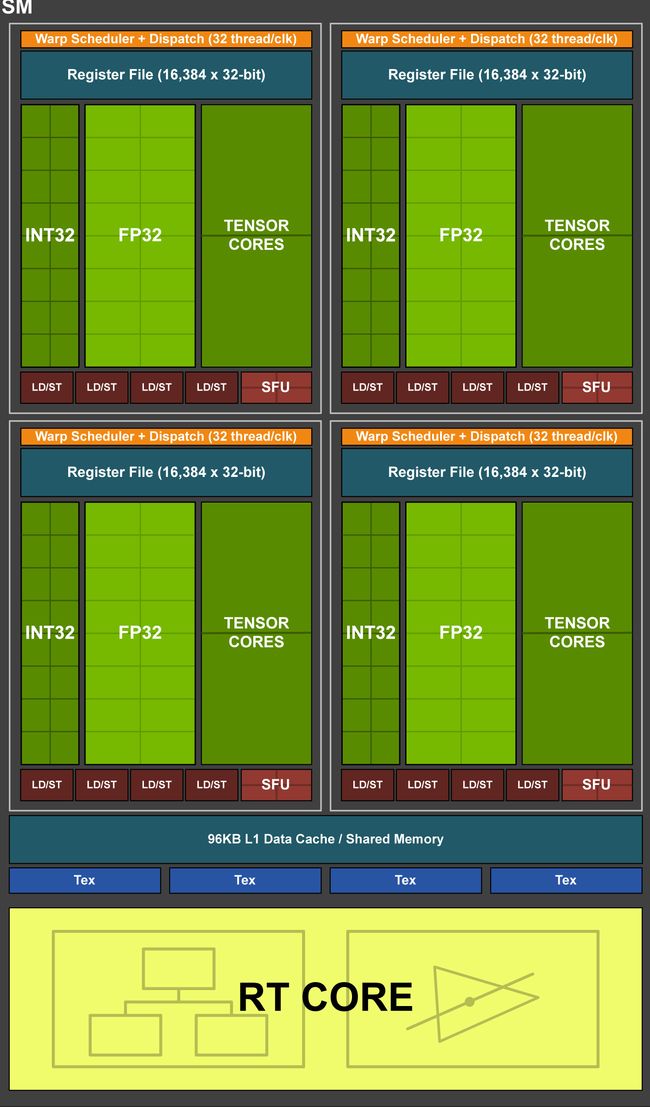
每个SM包含:
- 64 CUDA核
- 8 Tensor核
- 256 KB寄存器文件
TU102 GPU芯片实物图:
3.3 GPU架构的共性
纵观上一节的所有GPU架构,可以发现它们虽然有所差异,但存在着很多相同的概念和部件:
- GPC
- TPC
- Thread
- SM、SMX、SMM
- Warp
- SP
- Core
- ALU
- FPU
- SFU
- ROP
- Load/Store Unit
- L1 Cache
- L2 Cache
- Memory
- Register File
以上各个部件的用途将在下一章详细阐述。
GPU为什么会有这么多层级且有这么多雷同的部件?答案是GPU的任务是天然并行的,现代GPU的架构皆是以高度并行能力而设计的。
四、GPU运行机制
4.1 GPU渲染总览
由上一章可得知,现代GPU有着相似的结构,有很多相同的部件,在运行机制上,也有很多共同点。下面是Fermi架构的运行机制总览图:
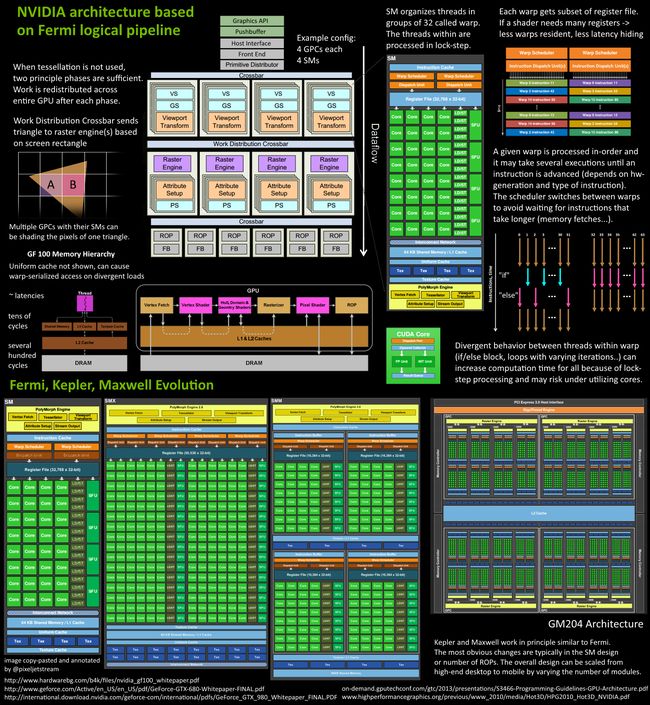
从Fermi开始NVIDIA使用类似的原理架构,使用一个Giga Thread Engine来管理所有正在进行的工作,GPU被划分成多个GPCs(Graphics Processing Cluster),每个GPC拥有多个SM(SMX、SMM)和一个光栅化引擎(Raster Engine),它们其中有很多的连接,最显著的是Crossbar,它可以连接GPCs和其它功能性模块(例如ROP或其他子系统)。
程序员编写的shader是在SM上完成的。每个SM包含许多为线程执行数学运算的Core(核心)。例如,一个线程可以是顶点或像素着色器调用。这些Core和其它单元由Warp Scheduler驱动,Warp Scheduler管理一组32个线程作为Warp(线程束)并将要执行的指令移交给Dispatch Units。
GPU中实际有多少这些单元(每个GPC有多少个SM,多少个GPC ......)取决于芯片配置本身。例如,GM204有4个GPC,每个GPC有4个SM,但Tegra X1有1个GPC和2个SM,它们均采用Maxwell设计。SM设计本身(内核数量,指令单位,调度程序......)也随着时间的推移而发生变化,并帮助使芯片变得如此高效,可以从高端台式机扩展到笔记本电脑移动。

如上图,对于某些GPU(如Fermi部分型号)的单个SM,包含:
-
32个运算核心 (Core,也叫流处理器Stream Processor)
-
16个LD/ST(load/store)模块来加载和存储数据
-
4个SFU(Special function units)执行特殊数学运算(sin、cos、log等)
-
128KB寄存器(Register File)
-
64KB L1缓存
-
全局内存缓存(Uniform Cache)
-
纹理读取单元
-
纹理缓存(Texture Cache)
-
PolyMorph Engine:多边形引擎负责属性装配(attribute Setup)、顶点拉取(VertexFetch)、曲面细分、栅格化(这个模块可以理解专门处理顶点相关的东西)。
-
2个Warp Schedulers:这个模块负责warp调度,一个warp由32个线程组成,warp调度器的指令通过Dispatch Units送到Core执行。
-
指令缓存(Instruction Cache)
-
内部链接网络(Interconnect Network)
4.2 GPU逻辑管线
了解上一节的部件和概念之后,可以深入阐述GPU的渲染过程和步骤。下面将以Fermi家族的SM为例,进行逻辑管线的详细说明。

1、程序通过图形API(DX、GL、WEBGL)发出drawcall指令,指令会被推送到驱动程序,驱动会检查指令的合法性,然后会把指令放到GPU可以读取的Pushbuffer中。
2、经过一段时间或者显式调用flush指令后,驱动程序把Pushbuffer的内容发送给GPU,GPU通过主机接口(Host Interface)接受这些命令,并通过前端(Front End)处理这些命令。
3、在图元分配器(Primitive Distributor)中开始工作分配,处理indexbuffer中的顶点产生三角形分成批次(batches),然后发送给多个GPCs。这一步的理解就是提交上来n个三角形,分配给这几个PGC同时处理。

4、在GPC中,每个SM中的Poly Morph Engine负责通过三角形索引(triangle indices)取出三角形的数据(vertex data),即图中的Vertex Fetch模块。
5、在获取数据之后,在SM中以32个线程为一组的线程束(Warp)来调度,来开始处理顶点数据。Warp是典型的单指令多线程(SIMT,SIMD单指令多数据的升级)的实现,也就是32个线程同时执行的指令是一模一样的,只是线程数据不一样,这样的好处就是一个warp只需要一个套逻辑对指令进行解码和执行就可以了,芯片可以做的更小更快,之所以可以这么做是由于GPU需要处理的任务是天然并行的。
6、SM的warp调度器会按照顺序分发指令给整个warp,单个warp中的线程会锁步(lock-step)执行各自的指令,如果线程碰到不激活执行的情况也会被遮掩(be masked out)。被遮掩的原因有很多,例如当前的指令是if(true)的分支,但是当前线程的数据的条件是false,或者循环的次数不一样(比如for循环次数n不是常量,或被break提前终止了但是别的还在走),因此在shader中的分支会显著增加时间消耗,在一个warp中的分支除非32个线程都走到if或者else里面,否则相当于所有的分支都走了一遍,线程不能独立执行指令而是以warp为单位,而这些warp之间才是独立的。
7、warp中的指令可以被一次完成,也可能经过多次调度,例如通常SM中的LD/ST(加载存取)单元数量明显少于基础数学操作单元。
8、由于某些指令比其他指令需要更长的时间才能完成,特别是内存加载,warp调度器可能会简单地切换到另一个没有内存等待的warp,这是GPU如何克服内存读取延迟的关键,只是简单地切换活动线程组。为了使这种切换非常快,调度器管理的所有warp在寄存器文件中都有自己的寄存器。这里就会有个矛盾产生,shader需要越多的寄存器,就会给warp留下越少的空间,就会产生越少的warp,这时候在碰到内存延迟的时候就会只是等待,而没有可以运行的warp可以切换。

9、一旦warp完成了vertex-shader的所有指令,运算结果会被Viewport Transform模块处理,三角形会被裁剪然后准备栅格化,GPU会使用L1和L2缓存来进行vertex-shader和pixel-shader的数据通信。

10、接下来这些三角形将被分割,再分配给多个GPC,三角形的范围决定着它将被分配到哪个光栅引擎(raster engines),每个raster engines覆盖了多个屏幕上的tile,这等于把三角形的渲染分配到多个tile上面。也就是像素阶段就把按三角形划分变成了按显示的像素划分了。

11、SM上的Attribute Setup保证了从vertex-shader来的数据经过插值后是pixel-shade是可读的。
12、GPC上的光栅引擎(raster engines)在它接收到的三角形上工作,来负责这些这些三角形的像素信息的生成(同时会处理裁剪Clipping、背面剔除和Early-Z剔除)。
13、32个像素线程将被分成一组,或者说8个2x2的像素块,这是在像素着色器上面的最小工作单元,在这个像素线程内,如果没有被三角形覆盖就会被遮掩,SM中的warp调度器会管理像素着色器的任务。
14、接下来的阶段就和vertex-shader中的逻辑步骤完全一样,但是变成了在像素着色器线程中执行。 由于不耗费任何性能可以获取一个像素内的值,导致锁步执行非常便利,所有的线程可以保证所有的指令可以在同一点。

15、最后一步,现在像素着色器已经完成了颜色的计算还有深度值的计算,在这个点上,我们必须考虑三角形的原始api顺序,然后才将数据移交给ROP(render output unit,渲染输入单元),一个ROP内部有很多ROP单元,在ROP单元中处理深度测试,和framebuffer的混合,深度和颜色的设置必须是原子操作,否则两个不同的三角形在同一个像素点就会有冲突和错误。
4.3 GPU技术要点
由于上一节主要阐述GPU内部的工作流程和机制,为了简洁性,省略了很多知识点和过程,本节将对它们做进一步补充说明。
4.3.1 SIMD和SIMT
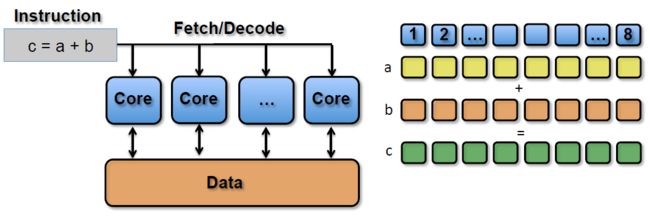
SIMD(Single Instruction Multiple Data)是单指令多数据,在GPU的ALU单元内,一条指令可以处理多维向量(一般是4D)的数据。比如,有以下shader指令:
float4 c = a + b; // a, b都是float4类型
对于没有SIMD的处理单元,需要4条指令将4个float数值相加,汇编伪代码如下:
ADD c.x, a.x, b.x
ADD c.y, a.y, b.y
ADD c.z, a.z, b.z
ADD c.w, a.w, b.w
但有了SIMD技术,只需一条指令即可处理完:
SIMD_ADD c, a, b

SIMT(Single Instruction Multiple Threads,单指令多线程)是SIMD的升级版,可对GPU中单个SM中的多个Core同时处理同一指令,并且每个Core存取的数据可以是不同的。
SIMT_ADD c, a, b
上述指令会被同时送入在单个SM中被编组的所有Core中,同时执行运算,但a、b 、c的值可以不一样:
4.3.2 co-issue
co-issue是为了解决SIMD运算单元无法充分利用的问题。例如下图,由于float数量的不同,ALU利用率从100%依次下降为75%、50%、25%。

为了解决着色器在低维向量的利用率低的问题,可以通过合并1D与3D或2D与2D的指令。例如下图,DP3指令用了3D数据,ADD指令只有1D数据,co-issue会自动将它们合并,在同一个ALU只需一个指令周期即可执行完。

但是,对于向量运算单元(Vector ALU),如果其中一个变量既是操作数又是存储数的情况,无法启用co-issue技术:

于是标量指令着色器(Scalar Instruction Shader)应运而生,它可以有效地组合任何向量,开启co-issue技术,充分发挥SIMD的优势。
4.3.3 if - else语句

如上图,SM中有8个ALU(Core),由于SIMD的特性,每个ALU的数据不一样,导致if-else语句在某些ALU中执行的是true分支(黄色),有些ALU执行的是false分支(灰蓝色),这样导致很多ALU的执行周期被浪费掉了(即masked out),拉长了整个执行周期。最坏的情况,同一个SM中只有1/8(8是同一个SM的线程数,不同架构的GPU有所不同)的利用率。
同样,for循环也会导致类似的情形,例如以下shader代码:
void func(int count, int breakNum)
{
for(int i=0; i由于每个ALU的count不一样,加上有break分支,导致最快执行完shader的ALU可能是最慢的N分之一的时间,但由于SIMD的特性,最快的那个ALU依然要等待最慢的ALU执行完毕,才能接下一组指令的活!也就白白浪费了很多时间周期。
4.3.4 Early-Z
早期GPU的渲染管线的深度测试是在像素着色器之后才执行(下图),这样会造成很多本不可见的像素执行了耗性能的像素着色器计算。

后来,为了减少像素着色器的额外消耗,将深度测试提至像素着色器之前(下图),这就是Early-Z技术的由来。

Early-Z技术可以将很多无效的像素提前剔除,避免它们进入耗时严重的像素着色器。Early-Z剔除的最小单位不是1像素,而是像素块(pixel quad,2x2个像素,详见[4.3.6 ](#4.3.6 像素块(pixel quad)))。
但是,以下情况会导致Early-Z失效:
- 开启Alpha Test:由于Alpha Test需要在像素着色器后面的Alpha Test阶段比较,所以无法在像素着色器之前就决定该像素是否被剔除。
- 开启Tex Kill:即在shader代码中有像素摒弃指令(DX的discard,OpenGL的clip)。
- 关闭深度测试。Early-Z是建立在深度测试看开启的条件下,如果关闭了深度测试,也就无法启用Early-Z技术。
- 开启Multi-Sampling:多采样会影响周边像素,而Early-Z阶段无法得知周边像素是否被裁剪,故无法提前剔除。
- 以及其它任何导致需要混合后面颜色的操作。
此外,Early-Z技术会导致一个问题:深度数据冲突(depth data hazard)。

例子要结合上图,假设数值深度值5已经经过Early-Z即将写入Frame Buffer,而深度值10刚好处于Early-Z阶段,读取并对比当前缓存的深度值15,结果就是10通过了Early-Z测试,会覆盖掉比自己小的深度值5,最终frame buffer的深度值是错误的结果。
避免深度数据冲突的方法之一是在写入深度值之前,再次与frame buffer的值进行对比:

4.3.5 统一着色器架构(Unified shader Architecture)
在早期的GPU,顶点着色器和像素着色器的硬件结构是独立的,它们各有各的寄存器、运算单元等部件。这样很多时候,会造成顶点着色器与像素着色器之间任务的不平衡。对于顶点数量多的任务,像素着色器空闲状态多;对于像素多的任务,顶点着色器的空闲状态多(下图)。

于是,为了解决VS和PS之间的不平衡,引入了统一着色器架构(Unified shader Architecture)。用了此架构的GPU,VS和PS用的都是相同的Core。也就是,同一个Core既可以是VS又可以是PS。

这样就解决了不同类型着色器之间的不平衡问题,还可以减少GPU的硬件单元,压缩物理尺寸和耗电量。此外,VS、PS可还可以和其它着色器(几何、曲面、计算)统一为一体。

4.3.6 像素块(Pixel Quad)
上一节步骤13提到:
32个像素线程将被分成一组,或者说8个2x2的像素块,这是在像素着色器上面的最小工作单元,在这个像素线程内,如果没有被三角形覆盖就会被遮掩,SM中的warp调度器会管理像素着色器的任务。
也就是说,在像素着色器中,会将相邻的四个像素作为不可分隔的一组,送入同一个SM内4个不同的Core。
为什么像素着色器处理的最小单元是2x2的像素块?
笔者推测有以下原因:
1、简化和加速像素分派的工作。
2、精简SM的架构,减少硬件单元数量和尺寸。
3、降低功耗,提高效能比。
4、无效像素虽然不会被存储结果,但可辅助有效像素求导函数。详见4.6 利用扩展例证。
这种设计虽然有其优势,但同时,也会激化过绘制(Over Draw)的情况,损耗额外的性能。比如下图中,白色的三角形只占用了3个像素(绿色),按我们普通的思维,只需要3个Core绘制3次就可以了。

但是,由于上面的3个像素分别占据了不同的像素块(橙色分隔),实际上需要占用12个Core绘制12次(下图)。

这就会额外消耗300%的硬件性能,导致了更加严重的过绘制情况。
更多详情可以观看虚幻官方的视频教学:实时渲染深入探究。
4.4 GPU资源机制
本节将阐述GPU的内存访问、资源管理等机制。
4.4.1 内存架构
部分架构的GPU与CPU类似,也有多级缓存结构:寄存器、L1缓存、L2缓存、GPU显存、系统显存。

它们的存取速度从寄存器到系统内存依次变慢:
| 存储类型 | 寄存器 | 共享内存 | L1缓存 | L2缓存 | 纹理、常量缓存 | 全局内存 |
|---|---|---|---|---|---|---|
| 访问周期 | 1 | 1~32 | 1~32 | 32~64 | 400~600 | 400~600 |
由此可见,shader直接访问寄存器、L1、L2缓存还是比较快的,但访问纹理、常量缓存和全局内存非常慢,会造成很高的延迟。
上面的多级缓存结构可被称为“CPU-Style”,还存在GPU-Style的内存架构:

这种架构的特点是ALU多,GPU上下文(Context)多,吞吐量高,依赖高带宽与系统内存交换数据。
4.4.2 GPU Context和延迟
由于SIMT技术的引入,导致很多同一个SM内的很多Core并不是独立的,当它们当中有部分Core需要访问到纹理、常量缓存和全局内存时,就会导致非常大的卡顿(Stall)。
例如下图中,有4组上下文(Context),它们共用同一组运算单元ALU。

假设第一组Context需要访问缓存或内存,会导致2~3个周期的延迟,此时调度器会激活第二组Context以利用ALU:
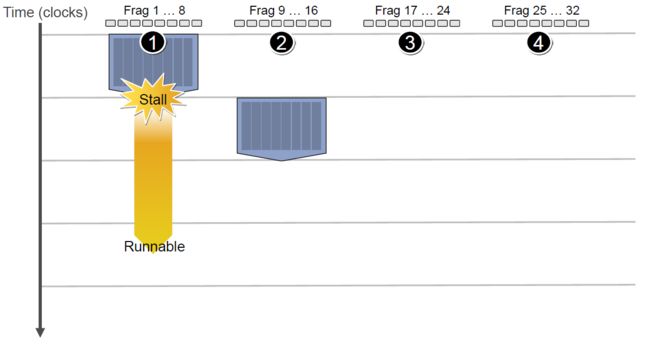
当第二组Context访问缓存或内存又卡住,会依次激活第三、第四组Context,直到第一组Context恢复运行或所有都被激活:

延迟的后果是每组Context的总体执行时间被拉长了:

但是,越多Context可用就越可以提升运算单元的吞吐量,比如下图的18组Context的架构可以最大化地提升吞吐量:

4.4.3 CPU-GPU异构系统
根据CPU和GPU是否共享内存,可分为两种类型的CPU-GPU架构:

上图左是分离式架构,CPU和GPU各自有独立的缓存和内存,它们通过PCI-e等总线通讯。这种结构的缺点在于 PCI-e 相对于两者具有低带宽和高延迟,数据的传输成了其中的性能瓶颈。目前使用非常广泛,如PC、智能手机等。
上图右是耦合式架构,CPU 和 GPU 共享内存和缓存。AMD 的 APU 采用的就是这种结构,目前主要使用在游戏主机中,如 PS4。
在存储管理方面,分离式结构中 CPU 和 GPU 各自拥有独立的内存,两者共享一套虚拟地址空间,必要时会进行内存拷贝。对于耦合式结构,GPU 没有独立的内存,与 GPU 共享系统内存,由 MMU 进行存储管理。
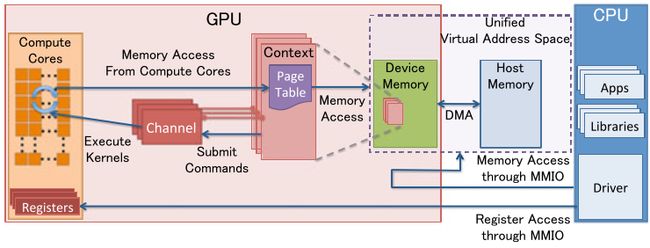
4.4.4 GPU资源管理模型
下图是分离式架构的资源管理模型:
-
MMIO(Memory Mapped IO)
- CPU与GPU的交流就是通过MMIO进行的。CPU 通过 MMIO 访问 GPU 的寄存器状态。
- DMA传输大量的数据就是通过MMIO进行命令控制的。
- I/O端口可用于间接访问MMIO区域,像Nouveau等开源软件从来不访问它。
-
GPU Context
- GPU Context代表了GPU计算的状态。
- 在GPU中拥有自己的虚拟地址。
- GPU 中可以并存多个活跃态下的Context。
-
GPU Channel
- 任何命令都是由CPU发出。
- 命令流(command stream)被提交到硬件单元,也就是GPU Channel。
- 每个GPU Channel关联一个context,而一个GPU Context可以有多个GPU channel。
- 每个GPU Context 包含相关channel的 GPU Channel Descriptors , 每个 Descriptor 都是 GPU 内存中的一个对象。
- 每个 GPU Channel Descriptor 存储了 Channel 的设置,其中就包括 Page Table 。
- 每个 GPU Channel 在GPU内存中分配了唯一的命令缓存,这通过MMIO对CPU可见。
- GPU Context Switching 和命令执行都在GPU硬件内部调度。
-
GPU Page Table
- GPU Context在虚拟基地空间由Page Table隔离其它的Context 。
- GPU Page Table隔离CPU Page Table,位于GPU内存中。
- GPU Page Table的物理地址位于 GPU Channel Descriptor中。
- GPU Page Table不仅仅将 GPU虚拟地址转换成GPU内存的物理地址,也可以转换成CPU的物理地址。因此,GPU Page Table可以将GPU虚拟地址和CPU内存地址统一到GPU统一虚拟地址空间来。
-
PCI-e BAR
- GPU 设备通过PCI-e总线接入到主机上。 Base Address Registers(BARs) 是 MMIO的窗口,在GPU启动时候配置。
- GPU的控制寄存器和内存都映射到了BARs中。
- GPU设备内存通过映射的MMIO窗口去配置GPU和访问GPU内存。
-
PFIFO Engine
- PFIFO是GPU命令提交通过的一个特殊的部件。
- PFIFO维护了一些独立命令队列,也就是Channel。
- 此命令队列是Ring Buffer,有PUT和GET的指针。
- 所有访问Channel控制区域的执行指令都被PFIFO 拦截下来。
- GPU驱动使用Channel Descriptor来存储相关的Channel设定。
- PFIFO将读取的命令转交给PGRAPH Engine。
-
BO
-
Buffer Object (BO),内存的一块(Block),能够用于存储纹理(Texture)、渲染目标(Render Target)、着色代码(shader code)等等。
-
Nouveau和Gdev经常使用BO。
Nouveau是一个自由及开放源代码显卡驱动程序,是为NVidia的显卡所编写。
Gdev是一套丰富的开源软件,用于NVIDIA的GPGPU技术,包括设备驱动程序。
-
更多详细可以阅读论文:Data Transfer Matters for GPU Computing。
4.4.5 CPU-GPU数据流
下图是分离式架构的CPU-GPU的数据流程图:

1、将主存的处理数据复制到显存中。
2、CPU指令驱动GPU。
3、GPU中的每个运算单元并行处理。此步会从显存存取数据。
4、GPU将显存结果传回主存。
4.4.6 显像机制
-
水平和垂直同步信号
在早期的CRT显示器,电子枪从上到下逐行扫描,扫描完成后显示器就呈现一帧画面。然后电子枪回到初始位置进行下一次扫描。为了同步显示器的显示过程和系统的视频控制器,显示器会用硬件时钟产生一系列的定时信号。

当电子枪换行进行扫描时,显示器会发出一个水平同步信号(horizonal synchronization),简称 HSync
当一帧画面绘制完成后,电子枪回复到原位,准备画下一帧前,显示器会发出一个垂直同步信号(vertical synchronization),简称 VSync。
显示器通常以固定频率进行刷新,这个刷新率就是 VSync 信号产生的频率。虽然现在的显示器基本都是液晶显示屏了,但其原理基本一致。
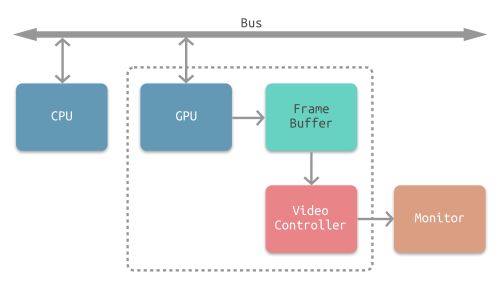
CPU将计算好显示内容提交至 GPU,GPU 渲染完成后将渲染结果存入帧缓冲区,视频控制器会按照 VSync 信号逐帧读取帧缓冲区的数据,经过数据转换后最终由显示器进行显示。
-
双缓冲
在单缓冲下,帧缓冲区的读取和刷新都都会有比较大的效率问题,经常会出现相互等待的情况,导致帧率下降。
为了解决效率问题,GPU 通常会引入两个缓冲区,即 双缓冲机制。在这种情况下,GPU 会预先渲染一帧放入一个缓冲区中,用于视频控制器的读取。当下一帧渲染完毕后,GPU 会直接把视频控制器的指针指向第二个缓冲器。

-
垂直同步
双缓冲虽然能解决效率问题,但会引入一个新的问题。当视频控制器还未读取完成时,即屏幕内容刚显示一半时,GPU 将新的一帧内容提交到帧缓冲区并把两个缓冲区进行交换后,视频控制器就会把新的一帧数据的下半段显示到屏幕上,造成画面撕裂现象:

为了解决这个问题,GPU 通常有一个机制叫做垂直同步(简写也是V-Sync),当开启垂直同步后,GPU 会等待显示器的 VSync 信号发出后,才进行新的一帧渲染和缓冲区更新。这样能解决画面撕裂现象,也增加了画面流畅度,但需要消费更多的计算资源,也会带来部分延迟。
4.5 Shader运行机制
Shader代码也跟传统的C++等语言类似,需要将面向人类的高级语言(GLSL、HLSL、CGSL)通过编译器转成面向机器的二进制指令,二进制指令可转译成汇编代码,以便技术人员查阅和调试。

由高级语言编译成汇编指令的过程通常是在离线阶段执行,以减轻运行时的消耗。
在执行阶段,CPU端将shader二进制指令经由PCI-e推送到GPU端,GPU在执行代码时,会用Context将指令分成若干Channel推送到各个Core的存储空间。
对现代GPU而言,可编程的阶段越来越多,包含但不限于:顶点着色器(Vertex Shader)、曲面细分控制着色器(Tessellation Control Shader)、几何着色器(Geometry Shader)、像素/片元着色器(Fragment Shader)、计算着色器(Compute Shader)、...

这些着色器形成流水线式的并行化的渲染管线。下面将配合具体的例子说明。
下段是计算漫反射的经典代码:
sampler mySamp;
Texture2D myTex;
float3 lightDir;