分治算法求解凸包问题
目录
- 相关概念
- 凸包问题
-
- 1.穷举法求凸包
-
- 点穷举
- 边穷举
- 2.分治法求凸包
-
- 插入凸包
- 并归凸包
- 快速凸包
分治算法(Divide and Conquer)是一种解决问题的算法设计策略,它将一个大问题分解成若干个规模较小且相互独立的子问题,然后将这些子问题的解合并起来,从而得到原问题的解。
分治算法通常包括以下三个步骤:
- 分解:将原问题分解为一组子问题,子问题与原问题类似,但是规模更小
- 解决:递归求解子问题,如果子问题足够小,停止递归,直接求解
- 合并:将子问题的解组合成原问题的解
相关概念
- 凸多边形:连接多边形中任意两点的线段全部在多边形内部
- 平面上某个点集的凸包:包含所有点的最小凸多边形
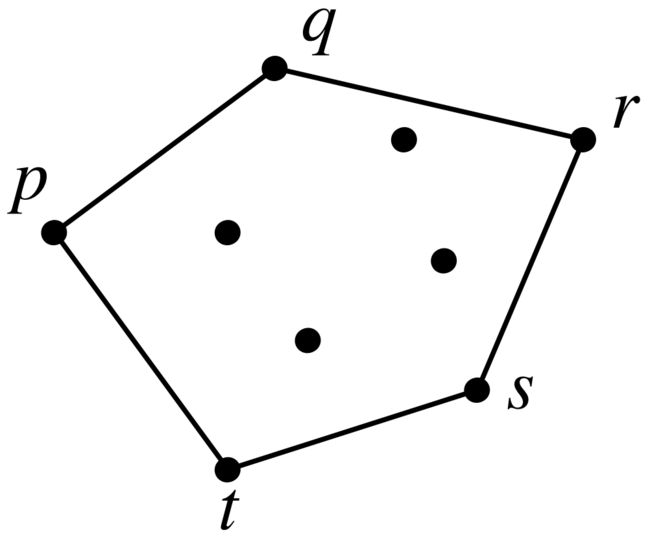
- 凸包的表示:最小凸多边形的顶点
- 集合(无序)
- 序列(有序)如上图按顺时针:
- 点和线段的方向关系:
给定线段 A B AB AB和点 C C C,判断 C C C与 A B → \overrightarrow{AB} AB的位置关系
计算叉积: ( x B − x A , y B − y A ) × ( x C − x B , y C − y B ) (x_{B}-x_{A},y_{B}-y_{A})\times(x_{C}-x_{B},y_{C}-y_{B}) (xB−xA,yB−yA)×(xC−xB,yC−yB)
• 大于0: C C C 在 A B → \overrightarrow{AB} AB 的左侧
• 等于0: C C C 在 A B → \overrightarrow{AB} AB 所在的直线上
• 小于0: C C C 在 A B → \overrightarrow{AB} AB 的右侧
凸包问题
给定⼆维平面上的n个点集 S = ( x i , y i ) ∣ i = 1 , 2 , . . . , n S={(x_{i},y_{i})|i=1,2,...,n} S=(xi,yi)∣i=1,2,...,n ,找到其凸包
- 假设没有两点具有相同的横坐标
- 假设没有两点具有相同的纵坐标
- 假设没有三点共线
//点结构
struct Point {
int x, y;
};
//边结构
struct Line {
Point start, end;
};
//判断点和线段的方向关系
int crossProduct(Point A, Point B, Point C) {
return (B.x - A.x) * (C.y - B.y) - (B.y - A.y) * (C.x - B.x);
}
1.穷举法求凸包
点穷举
由于凸包是点集S最小的凸多边形的顶点或边,我们可以从几何的角度进行观察,对于每⼀个点,如果它在其他任意三点构成的三角形中,那么它就被凸包所围,换句话说,它不可能是构成最小凸包的点。而那些构成凸包的点则不会处在任意三角形的内部。

根据这个性质,我们可以对点进行穷举:
- 对于每⼀个点,检查其是否在任意其它三点构成的三角形中
- O ( n ) O(n) O(n)个点, O ( n 3 ) O(n^{3}) O(n3)个三角形,检查需要 O ( 1 ) O(1) O(1)时间
- 总的时间复杂度: O ( n 4 ) O(n^{4}) O(n4)
bool isInsideTriangle(Point A, Point B, Point C, Point P) {
int crossABP = crossProduct(A, B, P);
int crossBCP = crossProduct(B, C, P);
int crossCAP = crossProduct(C, A, P);
return (crossABP >= 0 && crossBCP >= 0 && crossCAP >= 0) ||
(crossABP <= 0 && crossBCP <= 0 && crossCAP <= 0);
}
边穷举
根据凸包定义,我们也可以通过两个点组成的边来判断其是否属于凸包:
- 属于:所有其它的点都在该线段的⼀侧
- O ( n 2 ) O(n^{2}) O(n2)条线段,测试需要 O ( n ) O(n) O(n)时间
- 总的时间复杂度: O ( n 3 ) O(n^{3}) O(n3)

bool isConvexHullEdge(vector<Point>& points, Line edge) {
//遍历点
for (Point p : points) {
if (p != edge.start && p != edge.end) {
int crossProductValue = crossProduct(edge.start, edge.end, p);
if (crossProductValue > 0) {
return false;
}
}
}
return true;
}
2.分治法求凸包
对于点集的分解目前有两种分解策略:
- 1/n-1分:分为An-1个点和B1个点
- 二等分:分为A/B两个大小相等的点集

我们先考虑第一种情况,即1/n-1分治
插入凸包

- 分解:把n个点分成A、B两部分,其中A有n -1个点,B只有1个点
- 选取一个特别的点q放入B: 最右边的点 (横坐标最大的点)
- 该点一定属于新的凸包
- 递归求解A的凸包CH(A)
- 基本情况: 三个点,直接计算
- 合并CH(A) 和 q
- 算法时间复杂度: T ( n ) = T ( n − 1 ) + T m e r g e T(n)= T( n - 1)+ T_{merge} T(n)=T(n−1)+Tmerge
- T m e r g e = O ( n 2 ) ⇒ T ( n ) = O ( n 3 ) T_{merge} = O(n^{2}) \Rightarrow T(n) = O(n^{3}) Tmerge=O(n2)⇒T(n)=O(n3)
- T m e r g e = O ( n ) ⇒ T ( n ) = O ( n 2 ) T_{merge} = O(n) \Rightarrow T(n) = O(n^{2}) Tmerge=O(n)⇒T(n)=O(n2)
- T m e r g e = O ( log n ) ⇒ T ( n ) = O ( n log n ) T_{merge} = O(\log{n}) \Rightarrow T(n) = O(n\log{n}) Tmerge=O(logn)⇒T(n)=O(nlogn)
可以看到,降低插入凸包的复杂度关键是降低Merge时的复杂度。

- 凸包的支撑线: 与凸包仅相交于一点的直线
- 过凸包外一点有且仅有两条该凸包的支撑线 ( q p 3 qp_{3} qp3和 q p 5 qp_{5} qp5)
- 两个交点 ( p 3 p_{3} p3和 p 5 p_{5} p5)将凸包边界分成两个链: 近链和远链
- 新的凸包由远链和点q决定
- 从左支撑线开始,在凸包边界上顺时针前进直到右支撑线
如何求左右支撑线:
暴力求解:
- O ( n ) O(n) O(n)条候选支撑线 q p i qp_{i} qpi;
- 检查所有其他点是否在 q p i qp_{i} qpi同一侧: O ( n ) O(n) O(n)时间
- 共需 O ( n 2 ) O(n^{2}) O(n2)时间
优化搜索测略:
- 寻找左支撑线
- 从距离 q q q最近的 p i p_{i} pi开始,检查 p ( i − 1 ) % n p_{(i-1)\%n} p(i−1)%n和 p ( i + 1 ) % n p_{(i+1)\%n} p(i+1)%n是否都在 q p i qp_{i} qpi右侧
- 右侧寻找右支撑线
- 从距离 q q q最近的 p i p_{i} pi开始,检查 p ( i − 1 ) % n p_{(i-1)\%n} p(i−1)%n和 p ( i + 1 ) % n p_{(i+1)\%n} p(i+1)%n是否都在 q p i qp_{i} qpi左侧
- T ( n ) = T ( n − 1 ) + O ( n ) ⇒ T ( n ) = O ( n 2 ) T(n) = T(n - 1) + O(n)\Rightarrow T(n) = O(n^{2}) T(n)=T(n−1)+O(n)⇒T(n)=O(n2)
function ConvexHull(S):
if |S| <= 3:
return ComputeConvexHull(S)
else:
Divide S into A and B
q = rightmost point in B
CH_A = ConvexHull(A)
Merge CH_A with q to form the new convex hull CH
function Merge(CH_A, q):
Find left and right support lines for CH_A and q
Traverse the boundary of CH_A from left support line to right support line and update CH
function ComputeConvexHull(S):
// Implement a convex hull algorithm for small inputs (e.g., Gift Wrapping)
// Initial call to ConvexHull with the entire set of points S
ConvexHull(S)
并归凸包
- 分解: 把n个点分成A、B两部分,其中A、B各有n/2个点
- 预处理: 将所有点按横坐标排序
- 递归求解A和B的凸包,记为P和O
- 基本情况:是不是三个点?
- 合并P和Q
- 算法时间复杂度: T ( n ) = 2 T ( n / 2 ) + T m e r g e T(n) = 2T(n/2)+ T_{merge} T(n)=2T(n/2)+Tmerge
IF T m e r g e = O ( n ) ⇒ T ( n ) = O ( n l o g n ) T_{merge} = O(n) \Rightarrow T(n) = O(nlogn) Tmerge=O(n)⇒T(n)=O(nlogn)
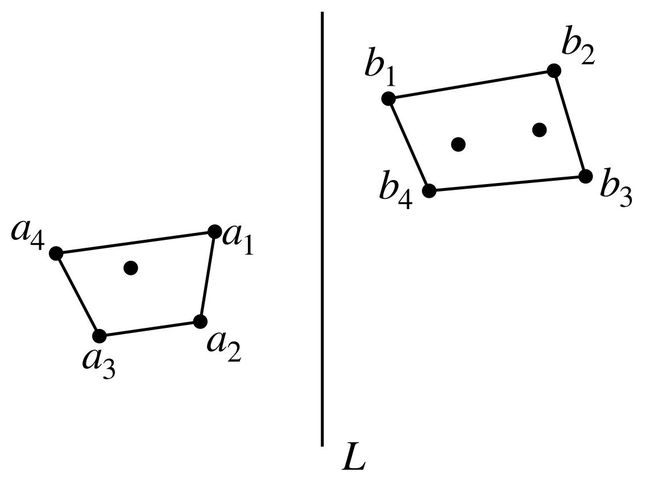
合并过程设计

- 凸包P和Q的桥: 既是P的支撑线,也是Q的支撑线 (比如 a 4 b 1 a_{4}b_{1} a4b1,和 a 2 b 1 a_{2}b_{1} a2b1)
- 上桥: 如果P和O都在桥的下方
- 下桥: 如果P和O都在桥的上方
- 找到P和O的上桥和下桥
- 每个凸包边界被其与桥的交点分成左链和右链
- 合并后的凸包=上桥 + P的左链 + 下桥 + O的右链
寻找上下桥
- 令 a i a_{i} ai是P中距离L最近的点, b j b_{j} bj是Q中距离L最近的点
- 如果 a i b j a_{i}b_{j} aibj不是 a i a_{i} ai的左支撑线,找到 a i a_{i} ai的左支撑线 a i b j a_{i}b_{j} aibj
- 顺时针检查 b j b_{j} bj的下一个点
- 如果 a i b j a_{i}b_{j} aibj不是 b j b_{j} bj的右支撑线,找到 b j b_{j} bj的右支撑线 a i b j a_{i}b_{j} aibj
- 逆时针检查 a i a_{i} ai的下一个点
- 重复上述步骤直到 a i b j a_{i}b_{j} aibj既是 a i a_{i} ai的左支撑线,又是 b j b_{j} bj的右支撑线,即为上桥
- 下桥类似求解
- 寻找上桥和下桥时间复杂度: O(n)
- 合并时间复杂度: O(n):
T ( n ) = 2 T ( n / 2 ) + O ( n ) ⇒ T ( n ) = O ( n l o g n ) T(n) = 2T(n/2) + O(n) \Rightarrow T(n) = O(nlogn) T(n)=2T(n/2)+O(n)⇒T(n)=O(nlogn)
快速凸包

- 按照x轴排序后选择最大和最小两个极端点a和b (一定属于凸包)
- a b → \overrightarrow{ab} ab将整个点集分成两部分: a b → \overrightarrow{ab} ab左边的点集A、 a b → \overrightarrow{ab} ab右边的点集B
- A中哪些点一定属于凸包?
- 距离 a b → \overrightarrow{ab} ab 最远的点c: O(1)时间可确定c到 a b → \overrightarrow{ab} ab的距离
- △ a b c \bigtriangleup abc △abc 中的点一定不属于凸包
- △ a b c \bigtriangleup abc △abc 外的点?
- b c → \overrightarrow{bc} bc右边的点: 递归求解哪些点属于凸包
- c a → \overrightarrow{ca} ca右边的点: 递归求解哪些点属于凸包
- B中哪些点一定属于凸包?

quick_hull( S S S) :
( a , b ) (a, b) (a,b) ← extreme_points( S S S)
A A A ← right_of ( S , b a → ) (S, \overrightarrow{ba}) (S,ba)
B B B ← right_of ( S , a b → ) (S, \overrightarrow{ab}) (S,ab)
Q A Q_{A} QA ← quick_half_hull ( A , b a → ) (A, \overrightarrow{ba}) (A,ba)
Q B Q_{B} QB ← quick_half_hull ( A , a b → ) (A, \overrightarrow{ab}) (A,ab)
return { a } ∪ Q A ∪ { b } ∪ Q B \{a\} ∪ Q_{A} ∪ \{b\} ∪ Q_{B} {a}∪QA∪{b}∪QB

quick_half_hull ( S , b a → ) (S, \overrightarrow{ba}) (S,ba):
if ( s = ⊘ ) (s=\oslash ) (s=⊘) return ⊘ \oslash ⊘
c ← furthest ( S , b a → ) (S, \overrightarrow{ba}) (S,ba)
A ← right_of ( S , b c → ) (S, \overrightarrow{bc}) (S,bc)
B ← right_of ( S , c a → ) (S, \overrightarrow{ca}) (S,ca)
Q A Q_{A} QA ← quick_half_hull ( S , b c → ) (S, \overrightarrow{bc}) (S,bc)
Q B Q_{B} QB ← quick_half_hull ( S , c a → ) (S, \overrightarrow{ca}) (S,ca)
return Q A ∪ { c } ∪ Q B Q_{A} ∪ \{c\} ∪ Q_{B} QA∪{c}∪QB
时间复杂度分析
令 ∣ S ∣ = n , ∣ A ∣ = α , ∣ B ∣ = β , α + β ≤ n − 1 |S| =n,|A|=\alpha,|B|=\beta,\alpha+\beta\le n-1 ∣S∣=n,∣A∣=α,∣B∣=β,α+β≤n−1
- quick_half_hull
- T ( n ) = T ( α ) + T ( β ) + O ( n ) T(n)=T({\alpha})+T(\beta)+O(n) T(n)=T(α)+T(β)+O(n)
1. α = β = n 2 ⇒ T ( n ) = O ( n l o g n ) \alpha=\beta=\frac{n}{2} \Rightarrow T(n)=O(nlogn) α=β=2n⇒T(n)=O(nlogn)
2. α = 0 , β = n − 1 ⇒ T ( n ) = O ( n 2 ) \alpha=0,\beta=n-1 \Rightarrow T(n)=O(n^{2}) α=0,β=n−1⇒T(n)=O(n2)- quick_hull
- 预排序计算极端点: O ( n l o g n ) O(nlogn) O(nlogn)
- 计算A和B: O ( n ) O(n) O(n)
- 递归求解A和B: < 2 T ( n ) <2T(n) <2T(n)
- 最坏情况下也是 O ( n 2 ) O(n^{2}) O(n2)
#include