数据结构与算法之美笔记——基础篇(中)——跳表、散列表、散列表链表组合
跳表
链表稍作改造(实现类似二分查找)——跳表
对链表建多级索引——跳表

第 k 级索引的结点个数是第 k-1 级索引的结点个数的 1/2,那第 k级索引结点的个数就是 n/(2的k次方)。
高效的动态插入和删除 时间复杂度是 O(logn)
插入操作
插入6

删除操作
如果这个结点在索引中也有出现,我们除了要删除原始链表中的结点,还要删除索引中的。
因为单链表中的删除操作需要拿到要删除结点的前驱结点,然后通过指针操作完成删除。所以在查找要删除的结点的时候,一定要获取前驱结点。当然,如果我们用的是双向链表,就不需要考虑这个问题了。
跳表索引动态更新
当我们不停地往跳表中插入数据时,如果我们不更新索引,就有可能出现某 2 个索引结点之间数据非常多的情况。极端情况下,跳表还会退化成单链表。

作为一种动态数据结构,我们需要某种手段来维护索引与原始链表大小之间的平衡,也就是说,如果链表中结点多了,索引结点就相应地增加一些,避免复杂度退化,以及查找、插入、删除操作性能下降。
如果你了解红黑树、AVL 树这样平衡二叉树,你就知道它们是通过左右旋的方式保持左右子树的大小平衡(如果不了解也没关系,我们后面会讲),而跳表是通过随机函数来维护前面提到的“平衡性”。
当我们往跳表中插入数据的时候,我们可以选择同时将这个数据插入到部分索引层中。如何选择加入哪些索引层呢?
我们通过一个随机函数,来决定将这个结点插入到哪几级索引中,比如随机函数生成了值 K,那我们就将这个结点添加到第一级到第 K 级这 K 级索引中。

随机函数的选择很有讲究,从概率上来讲,能够保证跳表的索引大小和数据大小平衡性,不至于性能过度退化。至于随机函数的选择,我就不展开讲解了。如果你感兴趣的话,可以看看我在 GitHub 上的代码或者 Redis 中关于有序集合的跳表实现。
跳表的实现还是稍微有点复杂的,我将 Java 实现的代码放到了 GitHub 中,你可以根据我刚刚的讲解,对照着代码仔细思考一下。你不用死记硬背代码,跳表的实现并不是我们这节的重点。
Redis 中为什么用跳表
Redis 中的有序集合是通过跳表来实现的,严格点讲,其实还用到了散列表。不过散列表我们后面才会讲到,所以我们现在暂且忽略这部分。如果你去查看 Redis 的开发手册,就会发现,Redis 中的有序集合支持的核心操作主要有下面这几个:
插入一个数据;
删除一个数据;
查找一个数据;
按照区间查找数据(比如查找值在 [100, 356] 之间的数据);
迭代输出有序序列。
其中,插入、删除、查找以及迭代输出有序序列这几个操作,红黑树也可以完成,时间复杂度跟跳表是一样的。但是,按照区间来查找数据这个操作,红黑树的效率没有跳表高。
对于按照区间查找数据这个操作,跳表可以做到 O(logn) 的时间复杂度定位区间的起点,然后在原始链表中顺序往后遍历就可以了。这样做非常高效。
当然,Redis 之所以用跳表来实现有序集合,还有其他原因,比如,跳表更容易代码实现。虽然跳表的实现也不简单,但比起红黑树来说还是好懂、好写多了,而简单就意味着可读性好,不容易出错。还有,跳表更加灵活,它可以通过改变索引构建策略,有效平衡执行效率和内存消耗。
散列表
散列表用的就是数组支持按照下标随机访问的时候,时间复杂度是 O(1) 的特性。我们通过散列函数把元素的键值映射为下标,然后将数据存储在数组中对应下标的位置。当我们按照键值查询元素时,我们用同样的散列函数,将键值转化数组下标,从对应的数组下标的位置取数据。
散列函数
该如何构造散列函数呢?我总结了三点散列函数设计的基本要求:
- 散列函数计算得到的散列值是一个非负整数;
- 如果 key1 = key2,那 hash(key1) == hash(key2);
- 如果 key1 ≠ key2,那 hash(key1) ≠ hash(key2)。
散列冲突
1. 开放寻址法
线性探测
开放寻址法的核心思想是,如果出现了散列冲突,我们就重新探测一个空闲位置,将其插入。
当我们往散列表中插入数据时,如果某个数据经过散列函数散列之后,存储位置已经被占用了,我们就从当前位置开始,依次往后查找,看是否有空闲位置,直到找到为止。
在散列表中查找元素的过程有点儿类似插入过程。我们通过散列函数求出要查找元素的键值对应的散列值,然后比较数组中下标为散列值的元素和要查找的元素。如果相等,则说明就是我们要找的元素;否则就顺序往后依次查找。如果遍历到数组中的空闲位置,还没有找到,就说明要查找的元素并没有在散列表中。

对于使用线性探测法解决冲突的散列表,删除操作稍微有些特别。我们不能单纯地把要删除的元素设置为空。
在查找的时候,一旦我们通过线性探测方法,找到一个空闲位置,我们就可以认定散列表中不存在这个数据。但是,如果这个空闲位置是我们后来删除的,就会导致原来的查找算法失效。本来存在的数据,会被认定为不存在。这个问题如何解决呢?
我们可以将删除的元素,特殊标记为 deleted。当线性探测查找的时候,遇到标记为 deleted 的空间,并不是停下来,而是继续往下探测。

线性探测法其实存在很大问题。当散列表中插入的数据越来越多时,散列冲突发生的可能性就会越来越大,空闲位置会越来越少,线性探测的时间就会越来越久。极端情况下,我们可能需要探测整个散列表,所以最坏情况下的时间复杂度为 O(n)。同理,在删除和查找时,也有可能会线性探测整张散列表,才能找到要查找或者删除的数据。
线性探测每次探测的步长是 1,那它探测的下标序列就是 hash(key)+0,hash(key)+1,hash(key)+2……
二次探测
二次探测探测的步长就变成了原来的“二次方”,也就是说,它探测的下标序列就是 hash(key)+0,hash(key)+1的平方,hash(key)+2的平方……
双重散列
不仅要使用一个散列函数。我们使用一组散列函数 hash1(key),hash2(key),hash3(key)……我们先用第一个散列函数,如果计算得到的存储位置已经被占用,再用第二个散列函数,依次类推,直到找到空闲的存储位置。
2. 链表法
在散列表中,每个“桶(bucket)”或者“槽(slot)”会对应一条链表,所有散列值相同的元素我们都放到相同槽位对应的链表中。

当插入的时候,我们只需要通过散列函数计算出对应的散列槽位,将其插入到对应链表中即可,所以插入的时间复杂度是 O(1)。
当查找、删除一个元素时,我们同样通过散列函数计算出对应的槽,然后遍历链表查找或者删除。
那查找或删除操作的时间复杂度是多少呢?
实际上,这两个操作的时间复杂度跟链表的长度 k 成正比,也就是 O(k)。对于散列比较均匀的散列函数来说,理论上讲,k=n/m,其中 n 表示散列中数据的个数,m 表示散列表中“槽”的个数。
Word 文档中单词拼写检查功能是如何实现的?
常用的英文单词有 20 万个左右,假设单词的平均长度是 10 个字母,平均一个单词占用 10 个字节的内存空间,那 20 万英文单词大约占 2MB 的存储空间,就算放大 10 倍也就是 20MB。对于现在的计算机来说,这个大小完全可以放在内存里面。所以我们可以用散列表来存储整个英文单词词典。
当用户输入某个英文单词时,我们拿用户输入的单词去散列表中查找。如果查到,则说明拼写正确;如果没有查到,则说明拼写可能有误,给予提示。借助散列表这种数据结构,我们就可以轻松实现快速判断是否存在拼写错误。
如何设计散列函数?
散列函数的设计不能太复杂
散列函数生成的值要尽可能随机并且均匀分布
如何实现 Word 拼写检查功能。这里面的散列函数,我们就可以这样设计:将单词中每个字母的ASCll 码值“进位”相加,然后再跟散列表的大小求余、取模,作为散列值。比如,英文单词 nice,我们转化出来的散列值就是下面这样:
hash("nice")=(("n" - "a") * 26*26*26 + ("i" - "a")*26*26 + ("c" - "a")*26+ ("e"-"a")) / 78978
实际上,散列函数的设计方法还有很多,比如直接寻址法、平方取中法、折叠法、随机数法等,这些你只要了解就行了,不需要全都掌握。
装载因子
不管采用哪种探测方法,当散列表中空闲位置不多的时候,散列冲突的概率就会大大提高。为了尽可能保证散列表的操作效率,一般情况下,我们会尽可能保证散列表中有一定比例的空闲槽位。我们用装载因子(load factor)来表示空位的多少。
装载因子的计算公式是:
散列表的装载因子 = 填入表中的元素个数 / 散列表的长度
装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降。
装载因子过大
装载因子越大,说明散列表中的元素越多,空闲位置越少,散列冲突的概率就越大。 不仅插入数据的过程要多次寻址或者拉很长的链,查找的过程也会因此变得很慢。
对于没有频繁插入和删除的静态数据集合来说,我们很容易根据数据的特点、分布等,设计出完美的、极少冲突的散列函数,因为毕竟之前数据都是已知的。
对于动态散列表来说,数据集合是频繁变动的,我们事先无法预估将要加入的数据个数,所以我们也无法事先申请一个足够大的散列表。随着数据慢慢加入,装载因子就会慢慢变大。当装载因子大到一定程度之后,散列冲突就会变得不可接受。这个时候,我们该如何处理呢?
还记得我们前面多次讲的“动态扩容”吗?你可以回想一下,我们是如何做数组、栈、队列的动态扩容的。
针对散列表,当装载因子过大时,我们也可以进行动态扩容,重新申请一个更大的散列表,将数据搬移到这个新散列表中。假设每次扩容我们都申请一个原来散列表大小两倍的空间。如果原来散列表的装载因子是 0.8,那经过扩容之后,新散列表的装载因子就下降为原来的一半,变成了 0.4。
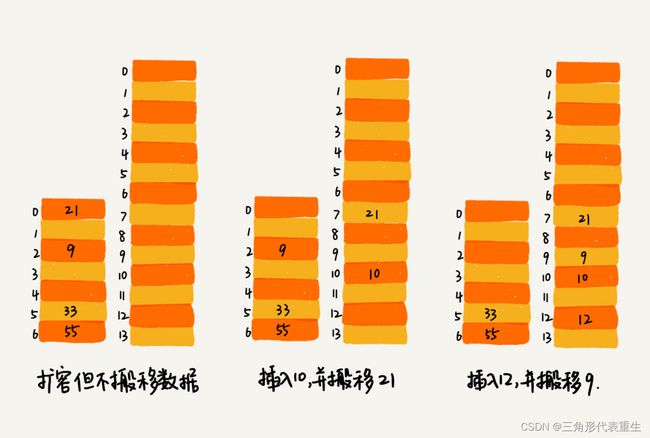
针对数组的扩容,数据搬移操作比较简单。但是,针对散列表的扩容,数据搬移操作要复杂很多。因为散列表的大小变了,数据的存储位置也变了,所以我们需要通过散列函数重新计算每个数据的存储位置。
在原来的散列表中,21 这个元素原来存储在下标为 0 的位置,搬移到新的散列表中,存储在下标为 7 的位置。

插入一个数据,最好情况下,不需要扩容,最好时间复杂度是 O(1)。最坏情况下,散列表装载因子过高,启动扩容,我们需要重新申请内存空间,重新计算哈希位置,并且搬移数据,所以时间复杂度是 O(n)。用摊还分析法,均摊情况下,时间复杂度接近最好情况,就是 O(1)。
实际上,对于动态散列表,随着数据的删除,散列表中的数据会越来越少,空闲空间会越来越多。如果我们对空间消耗非常敏感,我们可以在装载因子小于某个值之后,启动动态缩容。当然,如果我们更加在意执行效率,能够容忍多消耗一点内存空间,那就可以不用费劲来缩容了。
我们前面讲到,当散列表的装载因子超过某个阈值时,就需要进行扩容。装载因子阈值需要选择得当。如果太大,会导致冲突过多;如果太小,会导致内存浪费严重。
装载因子阈值的设置要权衡时间、空间复杂度。
如果内存空间不紧张,对执行效率要求很高,可以降低负载因子的阈值;
相反,如果内存空间紧张,对执行效率要求又不高,可以增加负载因子的值,甚至可以大于 1。
如何避免低效地扩容?
大部分情况下,动态扩容的散列表插入一个数据都很快,但是在特殊情况下,当装载因子已经到达阈值,需要先进行扩容,再插入数据。这个时候,插入数据就会变得很慢,甚至会无法接受。
我举一个极端的例子,如果散列表当前大小为 1GB,要想扩容为原来的两倍大小,那就需要对 1GB 的数据重新计算哈希值,并且从原来的散列表搬移到新的散列表,听起来就很耗时,是不是?
如果我们的业务代码直接服务于用户,尽管大部分情况下,插入一个数据的操作都很快,但是,极个别非常慢的插入操作,也会让用户崩溃。这个时候,“一次性”扩容的机制就不合适了。
为了解决一次性扩容耗时过多的情况,我们可以将扩容操作穿插在插入操作的过程中,分批完成。当装载因子触达阈值之后,我们只申请新空间,但并不将老的数据搬移到新散列表中。
**当有新数据要插入时,我们将新数据插入新散列表中,并且从老的散列表中拿出一个数据放入到新散列表。**每次插入一个数据到散列表,我们都重复上面的过程。经过多次插入操作之后,老的散列表中的数据就一点一点全部搬移到新散列表中了。这样没有了集中的一次性数据搬移,插入操作就都变得很快了。
这期间的查询操作怎么来做呢?对于查询操作,为了兼容了新、老散列表中的数据,我们先从新散列表中查找,如果没有找到,再去老的散列表中查找。
通过这样均摊的方法,将一次性扩容的代价,均摊到多次插入操作中,就避免了一次性扩容耗时过多的情况。这种实现方式,任何情况下,插入一个数据的时间复杂度都是 O(1)。
如何选择冲突解决方法?
Java 中 LinkedHashMap 就采用了链表法解决冲突,ThreadLocalMap 是通过线性探测的开放寻址法来解决冲突。那你知道,这两种冲突解决方法各有什么优势和劣势,又各自适用哪些场景吗?
1. 开放寻址法
开放寻址法不像链表法,需要拉很多链表。散列表中的数据都存储在数组中,可以有效地利用 CPU 缓存加快查询速度。而且,这种方法实现的散列表,序列化起来比较简单。链表法包含指针,序列化起来就没那么容易。你可不要小看序列化,很多场合都会用到的。我们后面就有一节会讲什么是数据结构序列化、如何序列化,以及为什么要序列化。
我们再来看下,开放寻址法有哪些缺点。
上一节我们讲到,用开放寻址法解决冲突的散列表,删除数据的时候比较麻烦,需要特殊标记已经删除掉的数据。而且,在开放寻址法中,所有的数据都存储在一个数组中,比起链表法来说,冲突的代价更高。所以,使用开放寻址法解决冲突的散列表,装载因子的上限不能太大。这也导致这种方法比链表法更浪费内存空间。
所以,我总结一下,当数据量比较小、装载因子小的时候,适合采用开放寻址法。这也是 Java 中的ThreadLocalMap使用开放寻址法解决散列冲突的原因。
2. 链表法
首先,链表法对内存的利用率比开放寻址法要高。因为链表结点可以在需要的时候再创建,并不需要像开放寻址法那样事先申请好。实际上,这一点也是我们前面讲过的链表优于数组的地方。
链表法比起开放寻址法,对大装载因子的容忍度更高。开放寻址法只能适用装载因子小于 1 的情况。接近 1 时,就可能会有大量的散列冲突,导致大量的探测、再散列等,性能会下降很多。但是对于链表法来说,只要散列函数的值随机均匀,即便装载因子变成 10,也就是链表的长度变长了而已,虽然查找效率有所下降,但是比起顺序查找还是快很多。
还记得我们之前在链表那一节讲的吗?链表因为要存储指针,所以对于比较小的对象的存储,是比较消耗内存的,还有可能会让内存的消耗翻倍。而且,因为链表中的结点是零散分布在内存中的,不是连续的,所以对 CPU 缓存是不友好的,这方面对于执行效率也有一定的影响。
当然,如果我们存储的是大对象,也就是说要存储的对象的大小远远大于一个指针的大小(4 个字节或者 8 个字节),那链表中指针的内存消耗在大对象面前就可以忽略了。
实际上,我们对链表法稍加改造,可以实现一个更加高效的散列表。那就是,我们将链表法中的链表改造为其他高效的动态数据结构,比如跳表、红黑树。这样,即便出现散列冲突,极端情况下,所有的数据都散列到同一个桶内,那最终退化成的散列表的查找时间也只不过是 O(logn)。这样也就有效避免了前面讲到的散列碰撞攻击。

我总结一下,基于链表的散列冲突处理方法比较适合存储大对象、大数据量的散列表,而且,比起开放寻址法,它更加灵活,支持更多的优化策略,比如用红黑树代替链表。
HashMap 源码分析
-
初始大小
HashMap 默认的初始大小是 16,当然这个默认值是可以设置的,如果事先知道大概的数据量有多大,可以通过修改默认初始大小,减少动态扩容的次数,这样会大大提高 HashMap 的性能。 -
装载因子和动态扩容
最大装载因子默认是 0.75,当 HashMap 中元素个数超过 0.75*capacity(capacity 表示散列表的容量)的时候,就会启动扩容,每次扩容都会扩容为原来的两倍大小。 -
散列冲突解决方法
HashMap 底层采用链表法来解决冲突。即使负载因子和散列函数设计得再合理,也免不了会出现拉链过长的情况,一旦出现拉链过长,则会严重影响 HashMap 的性能。
于是,在 JDK1.8 版本中,为了对 HashMap 做进一步优化,我们引入了红黑树。而当链表长度太长(默认超过 8)时,链表就转换为红黑树。我们可以利用红黑树快速增删改查的特点,提高 HashMap 的性能。当红黑树结点个数少于 8 个的时候,又会将红黑树转化为链表。因为在数据量较小的情况下,红黑树要维护平衡,比起链表来,性能上的优势并不明显。
- 散列函数
散列函数的设计并不复杂,追求的是简单高效、分布均匀。我把它摘抄出来,你可以看看。
int hash(Object key) {
int h = key.hashCode();
return (h ^ (h >>> 16)) & (capitity -1); //capicity 表示散列表的大小
}
其中,hashCode() 返回的是 Java 对象的 hash code。比如 String 类型的对象的 hashCode() 就是下面这样:
public int hashCode() {
int var1 = this.hash;
if(var1 == 0 && this.value.length > 0) {
char[] var2 = this.value;
for(int var3 = 0; var3 < this.value.length; ++var3) {
var1 = 31 * var1 + var2[var3];
}
this.hash = var1;
}
return var1;
}
首先,我会思考,何为一个工业级的散列表?工业级的散列表应该具有哪些特性?
结合已经学习过的散列知识,我觉得应该有这样几点要求:
支持快速的查询、插入、删除操作;
内存占用合理,不能浪费过多的内存空间;
性能稳定,极端情况下,散列表的性能也不会退化到无法接受的情况。
如何实现这样一个散列表呢?根据前面讲到的知识,我会从这三个方面来考虑设计思路:
设计一个合适的散列函数;
定义装载因子阈值,并且设计动态扩容策略;
选择合适的散列冲突解决方法。
关于散列函数、装载因子、动态扩容策略,还有散列冲突的解决办法,我们前面都讲过了,具体如何选择,还要结合具体的业务场景、具体的业务数据来具体分析。不过只要我们朝这三个方向努力,就离设计出工业级的散列表不远了。
散列表和链表都是如何组合使用
为什么散列表和链表经常一块使用?
散列表这种数据结构虽然支持非常高效的数据插入、删除、查找操作,但是散列表中的数据都是通过散列函数打乱之后无规律存储的。也就说,它无法支持按照某种顺序快速地遍历数据。如果希望按照顺序遍历散列表中的数据,那我们需要将散列表中的数据拷贝到数组中,然后排序,再遍历。
因为散列表是动态数据结构,不停地有数据的插入、删除,所以每当我们希望按顺序遍历散列表中的数据的时候,都需要先排序,那效率势必会很低。为了解决这个问题,我们将散列表和链表(或者跳表)结合在一起使用。
LRU 缓存淘汰算法
借助散列表,我们可以把 LRU 缓存淘汰算法的时间复杂度降低为 O(1)。现在,我们就来看看它是如何做到的。
首先,我们来回顾一下当时我们是如何通过链表实现 LRU 缓存淘汰算法的。
我们需要维护一个按照访问时间从大到小有序排列的链表结构。因为缓存大小有限,当缓存空间不够,需要淘汰一个数据的时候,我们就直接将链表头部的结点删除。
当要缓存某个数据的时候,先在链表中查找这个数据。如果没有找到,则直接将数据放到链表的尾部;
如果找到了,我们就把它移动到链表的尾部。因为查找数据需要遍历链表,所以单纯用链表实现的 LRU 缓存淘汰算法的时间复杂很高,是 O(n)。
一个缓存(cache)系统主要包含下面这几个操作:
往缓存中添加一个数据;
从缓存中删除一个数据;
在缓存中查找一个数据。
这三个操作都要涉及“查找”操作,如果单纯地采用链表的话,时间复杂度只能是 O(n)。如果我们将散列表和链表两种数据结构组合使用,可以将这三个操作的时间复杂度都降低到 O(1)。具体的结构就是下面这个样子:

我们使用双向链表存储数据,链表中的每个结点处理存储数据(data)、前驱指针(prev)、后继指针(next)之外,还新增了一个特殊的字段 hnext。这个 hnext 有什么作用呢?
因为我们的散列表是通过链表法解决散列冲突的,所以每个结点会在两条链中。**一个链是刚刚我们提到的双向链表,另一个链是散列表中的拉链。**前驱和后继指针是为了将结点串在双向链表中,hnext 指针是为了将结点串在散列表的拉链中。
缓存的三个操作,是如何做到时间复杂度是 O(1) 的?
首先,我们来看如何查找一个数据。我们前面讲过,散列表中查找数据的时间复杂度接近 O(1),所以通过散列表,我们可以很快地在缓存中找到一个数据。当找到数据之后,我们还需要将它移动到双向链表的尾部。
其次,我们来看如何删除一个数据。我们需要找到数据所在的结点,然后将结点删除。借助散列表,我们可以在 O(1) 时间复杂度里找到要删除的结点。因为我们的链表是双向链表,**双向链表可以通过前驱指针 O(1) 时间复杂度获取前驱结点,**所以在双向链表中,删除结点只需要 O(1) 的时间复杂度。
最后,我们来看如何添加一个数据。添加数据到缓存稍微有点麻烦,我们需要先看这个数据是否已经在缓存中。如果已经在其中,需要将其移动到双向链表的尾部;如果不在其中,还要看缓存有没有满。如果满了,则将双向链表头部的结点删除,然后再将数据放到链表的尾部;如果没有满,就直接将数据放到链表的尾部。
这整个过程涉及的查找操作都可以通过散列表来完成。其他的操作,比如删除头结点、链表尾部插入数据等,都可以在 O(1) 的时间复杂度内完成。所以,这三个操作的时间复杂度都是 O(1)。至此,我们就通过散列表和双向链表的组合使用,实现了一个高效的、支持 LRU 缓存淘汰算法的缓存系统原型。
Redis 有序集合
实际上,在有序集合中,每个成员对象有两个重要的属性,key(键值)和score(分值)。我们不仅会通过 score 来查找数据,还会通过 key 来查找数据。
举个例子,比如用户积分排行榜有这样一个功能:我们可以通过用户的 ID 来查找积分信息,也可以通过积分区间来查找用户 ID 或者姓名信息。这里包含 ID、姓名和积分的用户信息,就是成员对象,用户 ID 就是 key,积分就是 score。
所以,如果我们细化一下 Redis 有序集合的操作,那就是下面这样:
添加一个成员对象;
按照键值来删除一个成员对象;
按照键值来查找一个成员对象;
按照分值区间查找数据,比如查找积分在 [100, 356] 之间的成员对象;
按照分值从小到大排序成员变量;
如果我们仅仅按照分值将成员对象组织成跳表的结构,那按照键值来删除、查询成员对象就会很慢,解决方法与 LRU 缓存淘汰算法的解决方法类似。我们可以再按照键值构建一个散列表,这样按照 key 来删除、查找一个成员对象的时间复杂度就变成了 O(1)。同时,借助跳表结构,其他操作也非常高效。
实际上,Redis 有序集合的操作还有另外一类,也就是查找成员对象的排名(Rank)或者根据排名区间查找成员对象。这个功能单纯用刚刚讲的这种组合结构就无法高效实现了。这块内容我后面的章节再讲。
Java LinkedHashMap
如果你熟悉 Java,那你几乎天天会用到这个容器。我们之前讲过,HashMap 底层是通过散列表这种数据结构实现的。而 LinkedHashMap 前面比 HashMap 多了一个“Linked”,这里的“Linked”是不是说,LinkedHashMap 是一个通过链表法解决散列冲突的散列表呢?
实际上,LinkedHashMap 并没有这么简单,其中的“Linked”也并不仅仅代表它是通过链表法解决散列冲突的。关于这一点,在我是初学者的时候,也误解了很久。
我们先来看一段代码。你觉得这段代码会以什么样的顺序打印 3,1,5,2 这几个 key 呢?原因又是什么呢?
HashMap<Integer, Integer> m = new LinkedHashMap<>();
m.put(3, 11);
m.put(1, 12);
m.put(5, 23);
m.put(2, 22);
for (Map.Entry e : m.entrySet()) {
System.out.println(e.getKey());
}
我先告诉你答案,上面的代码会按照数据插入的顺序依次来打印,也就是说,打印的顺序就是 3,1,5,2。你有没有觉得奇怪?散列表中数据是经过散列函数打乱之后无规律存储的,这里是如何实现按照数据的插入顺序来遍历打印的呢?
你可能已经猜到了,LinkedHashMap 也是通过散列表和链表组合在一起实现的。实际上,它不仅支持按照插入顺序遍历数据,还支持按照访问顺序来遍历数据。你可以看下面这段代码:
// 10 是初始大小,0.75 是装载因子,true 是表示按照访问时间排序
HashMap<Integer, Integer> m = new LinkedHashMap<>(10, 0.75f, true);
m.put(3, 11);
m.put(1, 12);
m.put(5, 23);
m.put(2, 22);
m.put(3, 26);
m.get(5);
for (Map.Entry e : m.entrySet()) {
System.out.println(e.getKey());
}
这段代码打印的结果是 1,2,3,5。我来具体分析一下,为什么这段代码会按照这样顺序来打印。
每次调用 put() 函数,往 LinkedHashMap 中添加数据的时候,都会将数据添加到链表的尾部,所以,在前四个操作完成之后,链表中的数据是下面这样:

在第 8 行代码中,再次将键值为 3 的数据放入到 LinkedHashMap 的时候,会先查找这个键值是否已经有了,然后,再将已经存在的 (3,11) 删除,并且将新的 (3,26) 放到链表的尾部。所以,这个时候链表中的数据就是下面这样:

当第 9 行代码访问到 key 为 5 的数据的时候,我们将被访问到的数据移动到链表的尾部。所以,第 9 行代码之后,链表中的数据是下面这样:

所以,最后打印出来的数据是 1,2,3,5。从上面的分析,你有没有发现,按照访问时间排序的 LinkedHashMap 本身就是一个支持 LRU 缓存淘汰策略的缓存系统?实际上,它们两个的实现原理也是一模一样的。我也就不再啰嗦了。
我现在来总结一下,实际上,LinkedHashMap 是通过双向链表和散列表这两种数据结构组合实现的。LinkedHashMap 中的“Linked”实际上是指的是双向链表,并非指用链表法解决散列冲突。
哈希算法
哈希算法的定义和原理非常简单,基本上一句话就可以概括了。
将任意长度的二进制值串映射为固定长度的二进制值串,这个映射的规则就是哈希算法,而通过原始数据映射之后得到的二进制值串就是哈希值。
计一个优秀的哈希算法需要满足的几点要求:
从哈希值不能反向推导出原始数据(所以哈希算法也叫单向哈希算法);
对输入数据非常敏感,哪怕原始数据只修改了一个 Bit,最后得到的哈希值也大不相同;
散列冲突的概率要很小,对于不同的原始数据,哈希值相同的概率非常小;
哈希算法的执行效率要尽量高效,针对较长的文本,也能快速地计算出哈希值。
哈希算法的应用
安全加密、唯一标识、数据校验、散列函数、负载均衡、数据分片、分布式存储
应用一:安全加密
我们讲到任何哈希算法都会出现散列冲突,但是这个冲突概率非常小。越是复杂哈希算法越难破解,但同样计算时间也就越长。所以,选择哈希算法的时候,要权衡安全性和计算时间来决定用哪种哈希算法。
最常用于加密的哈希算法是MD5(MD5 Message-Digest Algorithm,MD5 消息摘要算法)和SHA(Secure Hash Algorithm,安全散列算法)。
其他加密算法,比如DES(Data Encryption Standard,数据加密标准)、AES(Advanced Encryption Standard,高级加密标准)
没有绝对安全的加密。越复杂、越难破解的加密算法,需要的计算时间也越长。比如 SHA-256 比 SHA-1 要更复杂、更安全,相应的计算时间就会比较长。密码学界也一直致力于找到一种快速并且很难被破解的哈希算法。我们在实际的开发过程中,也需要权衡破解难度和计算时间,来决定究竟使用哪种加密算法。
应用二:唯一标识
哈希算法可以对大数据做信息摘要,通过一个较短的二进制编码来表示很大的数据。
我先来举一个例子。如果要在海量的图库中,搜索一张图是否存在,我们不能单纯地用图片的元信息(比如图片名称)来比对,因为有可能存在名称相同但图片内容不同,或者名称不同图片内容相同的情况。那我们该如何搜索呢?
我们知道,任何文件在计算中都可以表示成二进制码串,所以,比较笨的办法就是,拿要查找的图片的二进制码串与图库中所有图片的二进制码串一一比对。如果相同,则说明图片在图库中存在。但是,每个图片小则几十 KB、大则几 MB,转化成二进制是一个非常长的串,比对起来非常耗时。有没有比较快的方法呢?
我们可以给每一个图片取一个唯一标识,或者说信息摘要。比如,我们可以从图片的二进制码串开头取 100 个字节,从中间取 100 个字节,从最后再取 100 个字节,然后将这 300 个字节放到一块,通过哈希算法(比如 MD5),得到一个哈希字符串,用它作为图片的唯一标识。通过这个唯一标识来判定图片是否在图库中,这样就可以减少很多工作量。
如果还想继续提高效率,我们可以把每个图片的唯一标识,和相应的图片文件在图库中的路径信息,都存储在散列表中。当要查看某个图片是不是在图库中的时候,我们先通过哈希算法对这个图片取唯一标识,然后在散列表中查找是否存在这个唯一标识。
如果不存在,那就说明这个图片不在图库中;如果存在,我们再通过散列表中存储的文件路径,获取到这个已经存在的图片,跟现在要插入的图片做全量的比对,看是否完全一样。如果一样,就说明已经存在;如果不一样,说明两张图片尽管唯一标识相同,但是并不是相同的图片。
应用三:数据校验
用于校验数据的完整性和正确性
网络传输是不安全的,下载的文件块有可能是被宿主机器恶意修改过的,又或者下载过程中出现了错误,所以下载的文件块可能不是完整的。如果我们没有能力检测这种恶意修改或者文件下载出错,就会导致最终合并后的电影无法观看,甚至导致电脑中毒。现在的问题是,如何来校验文件块的安全、正确、完整呢?
具体的 BT 协议很复杂,校验方法也有很多,我来说其中的一种思路。
我们通过哈希算法,对 100 个文件块分别取哈希值,并且保存在种子文件中。我们在前面讲过,哈希算法有一个特点,对数据很敏感。只要文件块的内容有一丁点儿的改变,最后计算出的哈希值就会完全不同。所以,当文件块下载完成之后,我们可以通过相同的哈希算法,对下载好的文件块逐一求哈希值,然后跟种子文件中保存的哈希值比对。如果不同,说明这个文件块不完整或者被篡改了,需要再重新从其他宿主机器上下载这个文件块。
应用四:散列函数
散列函数是设计一个散列表的关键。它直接决定了散列冲突的概率和散列表的性能。不过,相对哈希算法的其他应用,散列函数对于散列算法冲突的要求要低很多。即便出现个别散列冲突,只要不是过于严重,我们都可以通过开放寻址法或者链表法解决。
不仅如此,散列函数对于散列算法计算得到的值,是否能反向解密也并不关心。散列函数中用到的散列算法,更加关注散列后的值是否能平均分布,也就是,一组数据是否能均匀地散列在各个槽中。除此之外,散列函数执行的快慢,也会影响散列表的性能,所以,散列函数用的散列算法一般都比较简单,比较追求效率。
问题解答
还记得 2011 年 CSDN 的“脱库”事件吗?当时,CSDN 网站被黑客攻击,超过 600 万用户的注册邮箱和密码明文被泄露,很多网友对 CSDN 明文保存用户密码行为产生了不满。如果你是 CSDN 的一名工程师,你会如何存储用户密码这么重要的数据吗?仅仅 MD5 加密一下存储就够了吗?
我们可以通过哈希算法,对用户密码进行加密之后再存储,不过最好选择相对安全的加密算法,比如 SHA 等(因为 MD5 已经号称被破解了)。不过仅仅这样加密之后存储就万事大吉了吗?
字典攻击你听说过吗?如果用户信息被“脱库”,黑客虽然拿到是加密之后的密文,但可以通过“猜”的方式来破解密码,这是因为,有些用户的密码太简单。比如很多人习惯用 00000、123456 这样的简单数字组合做密码,很容易就被猜中。
那我们就需要维护一个常用密码的字典表,把字典中的每个密码用哈希算法计算哈希值,然后拿哈希值跟脱库后的密文比对。如果相同,基本上就可以认为,这个加密之后的密码对应的明文就是字典中的这个密码。(注意,这里说是的是“基本上可以认为”,因为根据我们前面的学习,哈希算法存在散列冲突,也有可能出现,尽管密文一样,但是明文并不一样的情况。)
针对字典攻击,我们可以引入一个盐(salt),跟用户的密码组合在一起,增加密码的复杂度。我们拿组合之后的字符串来做哈希算法加密,将它存储到数据库中,进一步增加破解的难度。不过我这里想多说一句,我认为安全和攻击是一种博弈关系,不存在绝对的安全。所有的安全措施,只是增加攻击的成本而已。
在分布式中的应用
应用五:负载均衡
我们知道,负载均衡算法有很多,比如轮询、随机、加权轮询等。那如何才能实现一个会话粘滞(session sticky)的负载均衡算法呢?也就是说,我们需要在同一个客户端上,在一次会话中的所有请求都路由到同一个服务器上。
最直接的方法就是,维护一张映射关系表,这张表的内容是客户端 IP 地址或者会话 ID 与服务器编号的映射关系。客户端发出的每次请求,都要先在映射表中查找应该路由到的服务器编号,然后再请求编号对应的服务器。这种方法简单直观,但也有几个弊端:
如果客户端很多,映射表可能会很大,比较浪费内存空间;
客户端下线、上线,服务器扩容、缩容都会导致映射失效,这样维护映射表的成本就会很大;
如果借助哈希算法,这些问题都可以非常完美地解决。我们可以通过哈希算法,对客户端 IP 地址或者会话 ID 计算哈希值,将取得的哈希值与服务器列表的大小进行取模运算,最终得到的值就是应该被路由到的服务器编号。 这样,我们就可以把同一个 IP 过来的所有请求,都路由到同一个后端服务器上。
应用六:数据分片
哈希算法还可以用于数据的分片
1. 如何统计“搜索关键词”出现的次数?
假如我们有 1T 的日志文件,这里面记录了用户的搜索关键词,我们想要快速统计出每个关键词被搜索的次数,该怎么做呢?
我们来分析一下。这个问题有两个难点,第一个是搜索日志很大,没办法放到一台机器的内存中。第二个难点是,如果只用一台机器来处理这么巨大的数据,处理时间会很长。
针对这两个难点,我们可以先对数据进行分片,然后采用多台机器处理的方法,来提高处理速度。具体的思路是这样的:为了提高处理的速度,我们用 n 台机器并行处理。我们从搜索记录的日志文件中,依次读出每个搜索关键词,并且通过哈希函数计算哈希值,然后再跟 n 取模,最终得到的值,就是应该被分配到的机器编号。
这样,哈希值相同的搜索关键词就被分配到了同一个机器上。也就是说,同一个搜索关键词会被分配到同一个机器上。每个机器会分别计算关键词出现的次数,最后合并起来就是最终的结果。
实际上,这里的处理过程也是 MapReduce 的基本设计思想。
2. 如何快速判断图片是否在图库中?
如何快速判断图片是否在图库中?上一节我们讲过这个例子,不知道你还记得吗?当时我介绍了一种方法,即给每个图片取唯一标识(或者信息摘要),然后构建散列表。
假设现在我们的图库中有 1 亿张图片,很显然,在单台机器上构建散列表是行不通的。因为单台机器的内存有限,而 1 亿张图片构建散列表显然远远超过了单台机器的内存上限。
我们同样可以对数据进行分片,然后采用多机处理。我们准备 n 台机器,让每台机器只维护某一部分图片对应的散列表。我们每次从图库中读取一个图片,计算唯一标识,然后与机器个数 n 求余取模,得到的值就对应要分配的机器编号,然后将这个图片的唯一标识和图片路径发往对应的机器构建散列表。
当我们要判断一个图片是否在图库中的时候,我们通过同样的哈希算法,计算这个图片的唯一标识,然后与机器个数 n 求余取模。假设得到的值是 k,那就去编号 k 的机器构建的散列表中查找。
现在,我们来估算一下,给这 1 亿张图片构建散列表大约需要多少台机器。
散列表中每个数据单元包含两个信息,哈希值和图片文件的路径。假设我们通过 MD5 来计算哈希值,那长度就是 128 比特,也就是 16 字节。文件路径长度的上限是 256 字节,我们可以假设平均长度是 128 字节。如果我们用链表法来解决冲突,那还需要存储指针,指针只占用 8 字节。所以,散列表中每个数据单元就占用 152 字节(这里只是估算,并不准确)。
假设一台机器的内存大小为 2GB,散列表的装载因子为 0.75,那一台机器可以给大约 1000 万(2GB*0.75/152)张图片构建散列表。所以,如果要对 1 亿张图片构建索引,需要大约十几台机器。在工程中,这种估算还是很重要的,能让我们事先对需要投入的资源、资金有个大概的了解,能更好地评估解决方案的可行性。
实际上,针对这种海量数据的处理问题,我们都可以采用多机分布式处理。借助这种分片的思路,可以突破单机内存、CPU 等资源的限制。
应用七:分布式存储
现在互联网面对的都是海量的数据、海量的用户。我们为了提高数据的读取、写入能力,一般都采用分布式的方式来存储数据,比如分布式缓存。我们有海量的数据需要缓存,所以一个缓存机器肯定是不够的。于是,我们就需要将数据分布在多台机器上。
该如何决定将哪个数据放到哪个机器上呢?我们可以借用前面数据分片的思想,即通过哈希算法对数据取哈希值,然后对机器个数取模,这个最终值就是应该存储的缓存机器编号。
但是,如果数据增多,原来的 10 个机器已经无法承受了,我们就需要扩容了,比如扩到 11 个机器,这时候麻烦就来了。因为,这里并不是简单地加个机器就可以了。
原来的数据是通过与 10 来取模的。比如 13 这个数据,存储在编号为 3 这台机器上。但是新加了一台机器中,我们对数据按照 11 取模,原来 13 这个数据就被分配到 2 号这台机器上了。

因此,所有的数据都要重新计算哈希值,然后重新搬移到正确的机器上。这样就相当于,缓存中的数据一下子就都失效了。所有的数据请求都会穿透缓存,直接去请求数据库。这样就可能发生雪崩效应,压垮数据库。
所以,我们需要一种方法,使得在新加入一个机器后,并不需要做大量的数据搬移。这时候,一致性哈希算法就要登场了。
假设我们有 k 个机器,数据的哈希值的范围是 [0, MAX]。我们将整个范围划分成 m 个小区间(m 远大于 k),每个机器负责 m/k 个小区间。当有新机器加入的时候,我们就将某几个小区间的数据,从原来的机器中搬移到新的机器中。这样,既不用全部重新哈希、搬移数据,也保持了各个机器上数据数量的均衡。
一致性哈希算法的基本思想就是这么简单。除此之外,它还会借助一个虚拟的环和虚拟结点,更加优美地实现出来。这里我就不展开讲了,如果感兴趣,你可以看下这个介绍。
除了我们上面讲到的分布式缓存,实际上,一致性哈希算法的应用非常广泛,在很多分布式存储系统中,都可以见到一致性哈希算法的影子。
总结
在负载均衡应用中,利用哈希算法替代映射表,可以实现一个会话粘滞的负载均衡策略。
在数据分片应用中,通过哈希算法对处理的海量数据进行分片,多机分布式处理,可以突破单机资源的限制。
在分布式存储应用中,利用一致性哈希算法,可以解决缓存等分布式系统的扩容、缩容导致数据大量搬移的难题。
哈希算法还有很多其他的应用,比如网络协议中的 CRC 校验、Git commit id 等等。