orb-slam3编译手册(Ubuntu20.04)
orb-slam3编译手册(Ubuntu20.04)
- 一、环境要求
-
- 1.安装git
- 2.安装g++
- 3.安装CMake
- 4.安装vi编辑器
- 二、源代码下载
- 三、依赖库下载
-
- 1.Eigen安装
- 2.Pangolin安装
- 3.opencv安装
- 4.安装Python & libssl-dev
- 5.安装boost库
- 三、安装orb-slam3
- 四、数据集下载及测试
写在前面:本文是在Ubuntu20.04系统上从零编译运行orb-slam3的全纪录,我相信即便是0基础的同学跟着本篇博客走下来以后也可以完美的让orb-slam3跑起来。本文包含从环境配置、安装依赖项、源代码获取到数据集下载、代码测试整个全链路打通的编译过程,是一个易于理解和跟随的指南,以确保用户能够成功构建和编译代码工程。
一、环境要求
作者是在Ubuntu20.04系统上编译成功的,其他版本不确定是否没问题。
1.安装git
查看git版本
git --version
若不显示版本号则证明系统没有安装git,使用如下命令安装
sudo apt install git
再次查看git版本号:
![]()
2.安装g++
查看g++版本
g++ --version
若报错则安装g++
sudo apt install g++
再次查看g++版本号

3.安装CMake
sudo apt install build-essential libssl-dev
wget https://github.com/Kitware/CMake/releases/download/v3.18.4/cmake-3.18.4.tar.gz
tar -zxvf cmake-3.18.4.tar.gz
cd cmake-3.18.4
./bootstrap
make
sudo make install
安装好后查看版本号,如如图所示则安装成功

4.安装vi编辑器
sudo apt-get remove vim-common
sudo apt-get install vim
至此orb-slam3的环境要求就满足,接下来进行源代码的下载。
二、源代码下载
将orb-slam3的源码保存在自己新建的文件夹中。
mkdir orb_slam3
cd orb_slam3
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
如果你的电脑访问github有问题,可以尝试git换源,搜索一下就有一大堆解决方案。
三、依赖库下载
1.Eigen安装
#github 有个mirror,版本3.3.4 from 2017
git clone https://github.com/eigenteam/eigen-git-mirror
#安装
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install
#安装后,头文件安装在/usr/local/include/eigen3/
2.Pangolin安装
安装Pangolin所需依赖
如果提示已经安装的跳过即可
sudo apt install libgl1-mesa-dev
sudo apt install libglew-dev
//sudo apt install cmake //注意以前装了就不需要安装了
sudo apt install libpython2.7-dev
//sudo apt install python-pip
//sudo python -mpip install numpy pyopengl Pillow pybind11
sudo apt install pkg-config
sudo apt install libegl1-mesa-dev libwayland-dev libxkbcommon-dev wayland-protocols
//sudo apt install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev libavdevice-dev
//sudo apt install libdc1394-22-dev libraw1394-dev
//sudo apt install libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev
安装Pangolin
# 默认git版本为0.6
git clone https://github.com/stevenlovegrove/Pangolin/tree/v0.6.git
cd Pangolin
mkdir build && cd build
cmake ..
make -j4
sudo make install
如果git进不去这个网址可以自己手动下载压缩包解压,然后进行编译安装,是一样的。
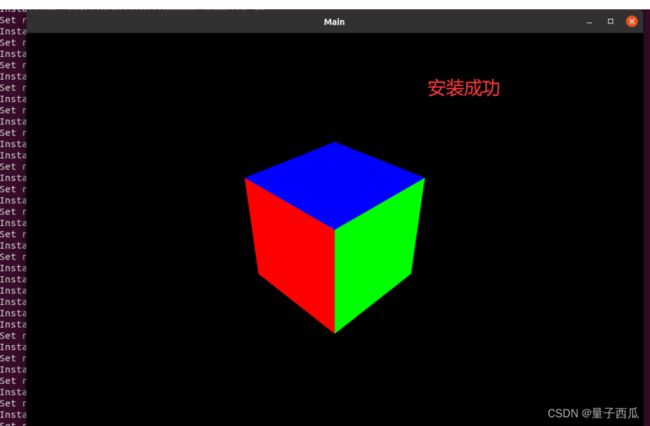
安装成功后进行测试。
cd examples/HelloPangolin
./HelloPangolin
若出现一个可以随意拖动的正方体,证明安装成功。
3.opencv安装
此处略过,网络上很多教程,因为我电脑本身就有opencv4.2所以直接跳过了这一步。
需要注意的是虽然opencv3/4都是可以的,但是在后面的整个项目的make过程中需要针对自己的opencv版本改一处地方,否则会报错,后面会提到。
4.安装Python & libssl-dev
sudo apt install libpython2.7-dev
sudo apt-get install libssl-dev
5.安装boost库
进入boost官网:https://www.boost.org/
我下载的是1.75版本
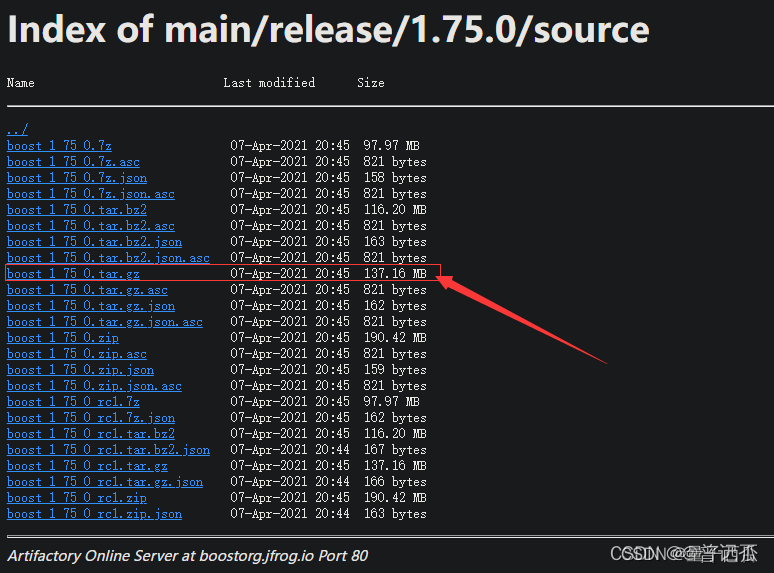
下载完毕解压后在文件夹中运行:
sudo ./bootstrap.sh
sudo ./b2 install
三、安装orb-slam3
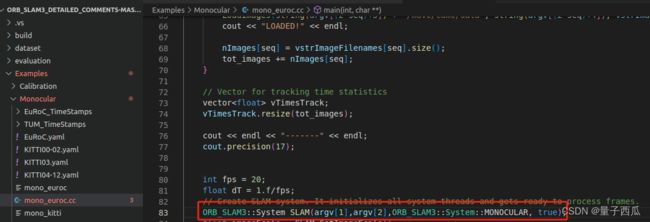
在编译安装之前,修改一处地方,代码位置如下:
如果你这里的最后一个bool类型是false,请改成true,该bool类型是控制单目摄像头跑euroc数据集结果可视化的参数,如果为false会导致运行的时候无法可视化。
可以直接一步到位,但是容易出问题且不好找问题。
cd ORB_SLAM3
chmod +x build.sh
./build.sh
如果上述方法报错了建议按照下面的一步一步来,其实就是一个个子文件夹挨个编译安装,虽然麻烦但是容易定位问题。
cd Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
cd ../../g2o
echo "Configuring and building Thirdparty/g2o ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
cd ../../../
echo "Uncompress vocabulary ..."
cd Vocabulary
tar -xf ORBvoc.txt.tar.gz
cd..
echo "Configuring and building ORB_SLAM3 ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j4
注意,前面提到的opencv版本问题,如果make过程中报错
FATAL_ERROR OpenCV > 3.2 not found
在哪个文件夹的make过程中报错就去哪个文件夹中的CMakeLists文件里找下面的代码块:
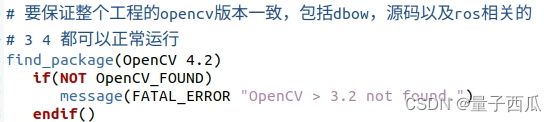
这里的find_package需要改成自己的opencv版本,否则会报错。
编译完成后就可以下载数据集进行测试。
四、数据集下载及测试
- 去官网(https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets)下载ASL格式的数据集,例如我这里下载的就是MH01的ASL格式数据集,下载后是一个压缩包,先放着。
- 在orb-slam3工程目录下新建dataset文件夹,dataset文件夹下新建一个文件夹MH01,将刚下载的数据集解压后的mav0文件夹拖到MH01文件夹中即可。
- 双击打开ORB-SLAM3源码中的脚本“euroc_examples.sh“,找到包含MH01的指令,如单目摄像头的快捷运行命令:
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono
将"$pathDatasetEuroc"修改为./dataset,修改后的命令如下:
./Examples/Monocular/mono_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular/EuRoC.yaml ./dataset/MH01 ./Examples/Monocular/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono
在terminal中运行如上命令,结果如下:
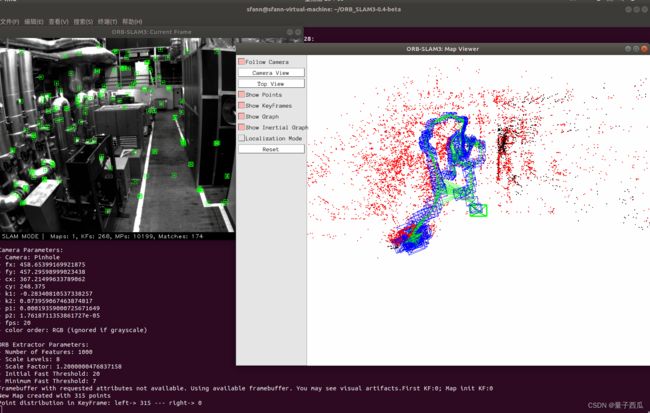
至此orb-slam3的编译运行便是成功了。