UE4 动态创建寻路网格
目录
1. 配置
2. 组件种类
3. 导航数据反推
4.1 Recast
4.2 Detour
6. Recast
7. 导航网格创建(Runtime)
8. 导航网格绘制(Runtime)
8.1源码分析
初始化:
收集数据方式一
收集数据方式二
8.2绘制方法
1. 配置
项目设置-》引擎-》导航系统(Navigation System)
自动创建导航数据

项目设置-》引擎-》导航网格体-》生成
Cell大小
Cell高度
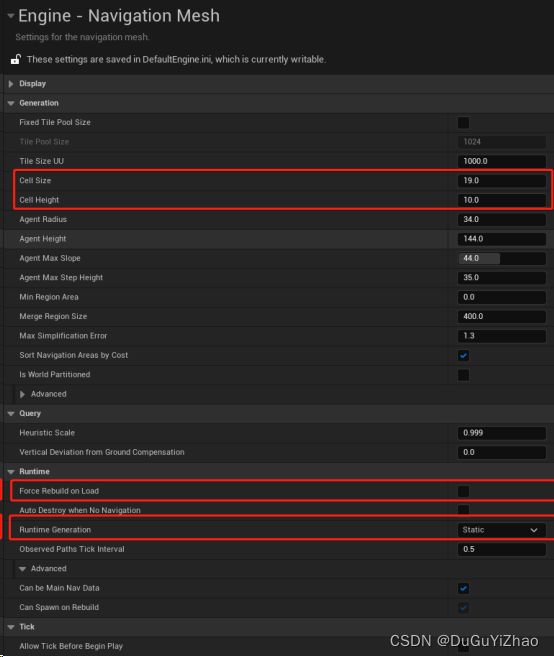
Runtime Generation:使用Dynamic
2. 组件种类
3. 导航数据反推
继承层次:
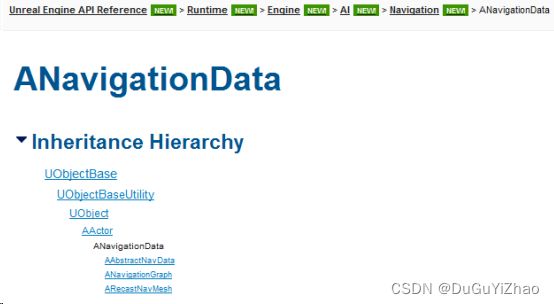
ANavigationData
表示抽象的导航数据(子类为NavMesh, NavGraph等),用作NavigationSystem处理的所有导航类型的公共接口
4. UE4 Navmesh寻路
参考:UE4 Navmesh寻路(一)Recast基础 - 知乎
目前生成Navmesh数据主要有两种方式:多边形裁剪和体素化。
(1)多边形裁剪是直接对地形的多边形网格数据进行裁剪及合并,从而生成导航网格。方法比较直观,但难度更高,目前havok引擎使用了此方法。
(2)体素化是对地形多边形网格进行栅格化,然后用这些“格子”重新生成导航网格,方法更复杂,但难度更低,Recast使用了此方案,而UE4使用了Recast。
4.1 Recast
它可以把地形数据进行抽象和简化,生成人工智能体可理解的导航数据。
Recast是一种优秀的navmesh生成套件
- 自动化,可以处理任意地形数据,输出导航网格
- 快速高效
- 能处理动态碰撞
- 开源,可根据自己游戏内容进行定制
- 自带可视化工具
Recast在运行时,首先会从关卡地形中构建一个体素模型,之后使用体素创建导航网格。
处理过程包括3步:创建体素模型,把模型分割成简单的区域,把这些区域再分割成简单多边形(凸的)
- 通过把输入的三角形mesh进行光栅化,形成一个多层的高度场,就能得到体素模型。之后可以对体素模型做一些简单的过滤,去掉玩家不可达的位置
- 体素模型描述的可行走区域被划分为重叠的2D区域,这些区域只有一个未重叠的等高线,这可以大大简化最后一步处理步骤
- 首先沿着边界划这些区域并进行化简可以剥离出导航多边形。然后把这些导航多边形处理为凸多边形,凸多边形可以更好的用于寻路和对场景进行空间推理。
4.1.2生成Navmesh的流程
配置结构体rcConfig
Project Config ->Engine->Navigation System:
cell size:xz平面下体素的大小(所以是正方形)
cell height:y轴下体素的高度
walkableSlopeAngle:可行走倾斜角度
walkableHeight:寻路agent高度
walkableClimb:寻路agent爬坡高度(楼梯等场景)
walkableRadius:寻路agent半径(过滤太靠地图边缘地区)
光栅化就是体素化
rcRasterizeTriangles
过滤可行走表面
rcFilterLowHangingWalkableObstacles
rcFilterLedgeSpans
过滤突起span
rcFilterWalkableLowHeightSpans
过滤可行走的低高度span
分割可走面为简单多边形
rcBuildCompactHeightfield
基于walkableHeight和walkableClimb判断连通,以编码的形式设置con属性
rcErodeWalkableArea
基于walkableRadius裁剪可行走区域。
用dist数组去存每个rcCompactSpan与可行走区域边缘的最近距离,得到dist结果后,如果距离小于walkableRadius*2就将chf.areas[i]标记为不可行走。???
具体分为3步:
- 初始化,span不可行走或者四周有一个不可行走的点,则dist标记为0;
- 从左下开始扫描一遍,做一次dist紧缩;
- 从右上开始扫描一遍,再做一次dist紧缩。
执行区域划分算法,把离散的Span整合为大的Region。
有三种方法可选:
- Watershed(分水岭) 最经典,最常用,效果最好,慢,一般用于离线处理,适合大地图;
- Monotone 最快且保证生成的是不重叠、没有洞的Region,但生成的Region可能又细又长,不过速度最快;
- Layer:速度、效果介于Watershed和Monotone之间,适用于tiled navmesh,且tile大小偏小
4.2 Detour
利用导航网格进行寻路;
5. 算法
(1)A*算法
A*算法详解 一看就会 手把手推导 完整代码注释 - 知乎
是一种静态路网中求解最短路最有效的直接搜索方法。之后涌现了很多预处理算法(ALT,CH,HL等等),在线查询效率是A*算法的数千甚至上万倍。
特点为在Dijkstra算法基础上引入了启发因子;
(2)曼哈顿距离算法
https://zhuanlan.zhihu.com/p/507719888
曼哈顿距离也叫出租车距离,用来标明两个点在标准坐标系上的绝对轴距总和。简单来说,对比一下欧氏距离。
欧氏距离:
![]()
曼哈顿距离:
![]()
/* 曼哈顿距离和欧氏距离的意义相近,也是为了描述两个点之间的距离,不同的是曼哈顿距离只需要做加减法,这使得计算机在大量的计算过程中代价更低,而且会消除在开平方过程中取近似值而带来的误差。 */
Detour中使用了欧几里得距离作为启发函数,即两个坐标之间的三维距离。
6. Recast
SoloMesh::handleBuild()
(1)获取导航网格盒体信息(最大/小盒体、顶点、顶点数量、三角、三角数量);
(2)初始化编译配置信息;
//cellSize、cellHeight、可行走斜坡角度agentMaxSlope、、、、:
m_cfg.cs = m_cellSize;
m_cfg.ch = m_cellHeight;
m_cfg.walkableSlopeAngle = m_agentMaxSlope;
m_cfg.walkableHeight = (int)ceilf(m_agentHeight / m_cfg.ch);
m_cfg.walkableClimb = (int)floorf(m_agentMaxClimb / m_cfg.ch);
m_cfg.walkableRadius = (int)ceilf(m_agentRadius / m_cfg.cs);
m_cfg.maxEdgeLen = (int)(m_edgeMaxLen / m_cellSize);
m_cfg.maxSimplificationError = m_edgeMaxError;
m_cfg.minRegionArea = (int)rcSqr(m_regionMinSize);// Note: area = size*size
m_cfg.mergeRegionArea = (int)rcSqr(m_regionMergeSize);// Note: area = size*size
m_cfg.maxVertsPerPoly = (int)m_vertsPerPoly;
m_cfg.detailSampleDist = m_detailSampleDist < 0.9f ? 0 : m_cellSize * m_detailSampleDist;
m_cfg.detailSampleMaxError = m_cellHeight * m_detailSampleMaxError;(3)场景模型体素化(Voxelization),或者叫光栅化(Rasterization)。
//分配我们栅格化输入数据的体素高度场。
m_solid = rcAllocHeightfield();
//创建高度场。
rcCreateHeightfield(m_ctx, *m_solid, m_cfg.width, m_cfg.height, m_cfg.bmin, m_cfg.bmax, m_cfg.cs, m_cfg.ch)
//分配可以保存三角形区域类型的数组。
//如果你有多个网格需要处理,分配和数组可以容纳你需要处理的最大数量的三角形。
m_triareas = new unsigned char[ntris];
// 根据它们的坡度找到适合行走的三角形,并栅格化它们。
// 如果你的输入数据是多个网格,你可以在这里转换它们,计算每个网格的类型并栅格化它们。
rcMarkWalkableTriangles(m_ctx, m_cfg.walkableSlopeAngle, verts, nverts, tris, ntris, m_triareas);
rcRasterizeTriangles(m_ctx, verts, nverts, tris, m_triareas, ntris, *m_solid, m_cfg.walkableClimb)(4)过滤可行走表面(Walkable Suface)
// 一旦所有的几何图形都栅格化了,我们就会进行初始的滤波,以消除由保守栅格化引起的多余的悬垂,以及角色不可能站立的滤波跨度。
rcFilterLowHangingWalkableObstacles(m_ctx, m_cfg.walkableClimb, *m_solid);
rcFilterLedgeSpans(m_ctx, m_cfg.walkableHeight, m_cfg.walkableClimb, *m_solid);
rcFilterWalkableLowHeightSpans(m_ctx, m_cfg.walkableHeight, *m_solid);
(5)区域生成(Region)
// 压缩高度字段,以便从现在开始更快地处理。
// 这将导致更多的缓存一致数据,以及可行走单元之间的邻居将被计算。
rcAllocCompactHeightfield();
rcBuildCompactHeightfield(m_ctx, m_cfg.walkableHeight, m_cfg.walkableClimb, *m_solid, *m_chf)
// 通过代理半径削减可行走区域Erode the walkable area by agent radius.
rcErodeWalkableArea(m_ctx, m_cfg.walkableRadius, *m_chf)
// (可选)标记区域。
rcMarkConvexPolyArea(m_ctx, vols[i].verts, vols[i].nverts, vols[i].hmin, vols[i].hmax, (unsigned char)vols[i].area, *m_chf);
//划分高度场,以便我们稍后可以使用简单的算法对可行走区域进行三角测量。
// 有3种分区方法,每种方法各有优缺点:流域划分(慢但精确);单调划分(快单不精确;层划分(速度适中))
//流域划分
// 准备区域划分,通过计算沿可行走表面的距离场。
rcBuildDistanceField(m_ctx, *m_chf)
// 将可行走的表面划分为没有孔洞的简单区域。
rcBuildRegions(m_ctx, *m_chf, 0, m_cfg.minRegionArea, m_cfg.mergeRegionArea)
//单调划分
//将可行走的表面划分为没有孔洞的简单区域。单调划分不需要距离场。
rcBuildRegionsMonotone(m_ctx, *m_chf, 0, m_cfg.minRegionArea, m_cfg.mergeRegionArea)
//层划分
//将可行走的表面划分为没有孔洞的简单区域。
rcBuildLayerRegions(m_ctx, *m_chf, 0, m_cfg.minRegionArea)
(6)轮廓生成(Contour边缘)
// 创建轮廓
m_cset = rcAllocContourSet();
rcBuildContours(m_ctx, *m_chf, m_cfg.maxSimplificationError, m_cfg.maxEdgeLen, *m_cset)
(7)轮廓网格生成(Poly Mesh)
//从轮廓集合构建多边形导航网格。
m_pmesh = rcAllocPolyMesh();
rcBuildPolyMesh(m_ctx, *m_cset, m_cfg.maxVertsPerPoly, *m_pmesh)
(8)三角形化(Triangulation)生成细节网格(Detailed Mesh)
//创建细节网格,允许访问每个多边形的近似高度。
m_dmesh = rcAllocPolyMeshDetail();
rcBuildPolyMeshDetail(m_ctx, *m_pmesh, *m_chf, m_cfg.detailSampleDist, m_cfg.detailSampleMaxError, *m_dmesh)
rcFreeCompactHeightfield(m_chf);
rcFreeContourSet(m_cset);
// 此时导航网格数据已经准备好了,你可以从m_pmesh访问它。
// 参见duDebugDrawPolyMesh或dtCreateNavMeshData作为如何访问数据的示例。
(9)从重铸多边形网格中创建绕行数据。
dtCreateNavMeshData(¶ms, &navData, &navDataSize)
m_navMesh = dtAllocNavMesh();7. 导航网格创建(Runtime)
FRecastNavMeshGenerator
TArray SupportedBounds;
NavSys->GetNavigationBoundsForNavData(*DestNavMesh, SupportedBounds);
UNavigationSystemV1::GetNavigationBoundsForNavData
RegisteredNavBounds
UNavigationSystemV1::RegisteredNavBounds
UNavigationSystemV1::PerformNavigationBoundsUpdate
UNavigationSystemV1::GatherNavigationBounds()
UNavigationSystemV1::AddNavigationBounds
ANavMeshBoundsVolume* V = (*It);
V->GetComponentsBoundingBox(true);
AActor::GetComponentsBoundingBox
UPrimitiveComponent* InPrimComp
InPrimComp->Bounds.GetBox(); 重写GetComponentsBoundingBox接口
//~ Begin Actor Interface
virtual FBox GetComponentsBoundingBox(bool bNonColliding = false, bool bIncludeFromChildActors = false) const override;
//~ End Actor Interface
8. 导航网格绘制(Runtime)
8.1源码分析
初始化:
FNavigationSystem::AddNavigationSystemToWorld(*PlayWorld, LocalPlayers.Num() > 0 ? FNavigationSystemRunMode::PIEMode : FNavigationSystemRunMode::SimulationMode);
UNavigationSystemV1::OnWorldInitDone(FNavigationSystemRunMode Mode)
UNavigationSystemV1::DoInitialSetup()
UNavigationSystemV1::UpdateAbstractNavData()
UNavigationSystemV1::CreateNavigationDataInstanceInLevel(const FNavDataConfig& NavConfig, ULevel* SpawnLevel)
ANavigationData* Instance = World->SpawnActor(*NavConfig.GetNavDataClass(), SpawnInfo);
ANavigationData::PostInitProperties()
ANavigationData::RequestRegistration()
UNavigationSystemV1::RequestRegistrationDeferred(ANavigationData& NavData) 关联BP的UI
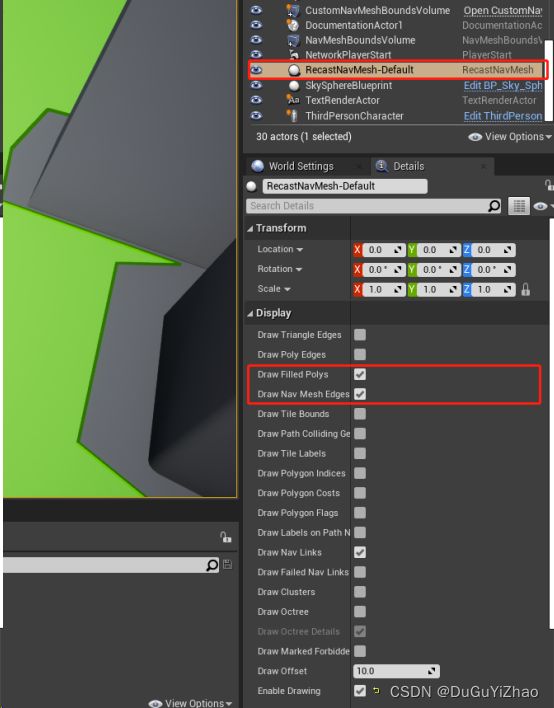
bDrawFilledPolys
bDrawNavMeshEdges
//override UActorComponent Interface
+ UPrimitiveComponent::CreateRenderState_Concurrent
+ FScene::UpdatePrimitiveTransform(UPrimitiveComponent* Primitive)
// FSceneInterface interface.
+ FScene::AddPrimitive(UPrimitiveComponent* Primitive)
//override UPrimitiveComponent Interface
+ UNavMeshRenderingComponent::CreateSceneProxy()
//限制打包版本不可用
#if WITH_RECAST && !UE_BUILD_SHIPPING && !UE_BUILD_TEST
# UNavMeshRenderingComponent::GatherData()
#if WITH_RECAST
+ FNavMeshSceneProxyData::GetDetailFlags(const ARecastNavMesh* NavMesh)
+ FNavMeshSceneProxyData::GatherData
+ ARecastNavMesh::GetDebugGeometry
+ FPImplRecastNavMesh::GetDebugGeometry
# FPImplRecastNavMesh::GetTilesDebugGeometry
+ FPImplRecastNavMesh::GetDebugPolyEdges收集数据方式一
方式一:ARecastNavMesh::GetDebugGeometry
FRecastDebugGeometry
TArray MeshVerts;// add all the poly verts and detail verts
TArray NavMeshEdges;// tile edges and navmesh edges
TArray AreaIndices
TArray BuiltMeshIndices;
//TArray PolyEdges;
dtMeshTile
float* verts;///< The tile vertices. [Size: dtMeshHeader::vertCount]
float* detailVerts; /// The detail mesh's unique vertices. [(x, y, z) * dtMeshHeader::detailVertCount]
ARecastNavMesh::UpdateNavMeshDrawing()
NavMeshRenderComp->GetVisibleFlag()
bool IsForcingUpdate() const { return bForceUpdate; }
bool UNavMeshRenderingComponent::IsNavigationShowFlagSet(const UWorld* World)
ANavigationData::bEnableDrawing
FNavigationSystemExec::Exec(UWorld* InWorld, const TCHAR* Cmd, FOutputDevice& Ar)
Cmd: CYCLENAVDRAWN / CountNavMem / RebuildNavigation / RedrawNav(RedrawNavigation)
UNavigationSystemV1::HandleCycleNavDrawnCommand(const TCHAR* Cmd, FOutputDevice& Ar)
UNavigationSystemV1::CycleNavigationDataDrawn()
ANavigationData::SetNavRenderingEnabled(bool bEnable)
AActor::MarkComponentsRenderStateDirty()
UActorComponent::MarkRenderStateDirty()
TArray UNavigationSystemV1::NavDataRegistrationQueue;
ANavigationData::PostInitProperties()
ANavigationData::RequestRegistration()
UNavigationSystemV1* NavSys = FNavigationSystem::GetCurrent(GetWorld());
UNavigationSystemV1::RequestRegistrationDeferred(ANavigationData& NavData)
SupportedAgents
TArray UNavigationSystemV1::SupportedAgents
UNavigationSystemV1::ApplySupportedAgentsFilter()
FNavigationSystem::GetFallbackNavDataConfig()
FNavDataConfig::FNavDataConfig(const FNavDataConfig& Other)
UNavigationSystemV1::PostEditChangeChainProperty
UNavigationSystemV1::SetSupportedAgentsNavigationClass
SetNavDataClass
FNavigationSystem::GetDefaultNavDataClass()
Delegates.GetDefaultNavDataClass.Execute();
UNavigationSystemBase::GetDefaultNavDataClassDelegate()
//---------可配置就好了
return ARecastNavMesh::StaticClass();
ARecastNavMesh
class ARecastNavMesh : public ANavigationData
NavDataSet
TArray UNavigationSystemV1::NavDataSet;
ANavigationData
ANavigationData::RenderingComp
ANavigationData::ConstructRenderingComponent
//---------可配置就好了
return NewObject(this, TEXT("NavRenderingComp"), RF_Transient);
UNavMeshRenderingComponent
//支持运行时动态生成判断--------工程配置:Runtime Generation
virtual bool SupportsRuntimeGeneration() const;
return (RuntimeGeneration != ERuntimeGenerationType::Static);
UNavigationSystemV1::PerformNavigationBoundsUpdate
ANavigationData::OnNavigationBoundsChanged()
ARecastNavMesh::ConditionalConstructGenerator()
ARecastNavMesh::CreateGeneratorInstance()
new FRecastNavMeshGenerator(*this);
NavDataGenerator = MakeShareable((FNavDataGenerator*)Generator);
ARecastNavMesh::RestrictBuildingToActiveTiles
FRecastNavMeshGenerator::RestrictBuildingToActiveTiles
TArray FRecastNavMeshGenerator::ActiveTiles;
FRecastNavMeshGenerator::IsInActiveSet
UNavigationSystemV1::AddDirtyAreas(const TArray& NewAreas, int32 Flags)
UNavigationSystemV1::AddDirtyArea(const FBox& NewArea, int32 Flags)
FNavigationDirtyAreasController::AddArea
dtNavMesh
dtMeshTile* m_tiles; ///< List of tiles.
int m_maxTiles; ///< Max number of tiles.
/// The maximum number of tiles supported by the navigation mesh.
/// @return The maximum number of tiles supported by the navigation mesh.
int getMaxTiles() const;
/// Gets the tile at the specified index.
/// @param[in] i The tile index. [Limit: 0 >= index < #getMaxTiles()]
/// @return The tile at the specified index.
const dtMeshTile* getTile(int i) const;
FRecastNavMeshGenerator
/** Navigation mesh that owns this generator */
ARecastNavMesh* DestNavMesh;
const ARecastNavMesh* GetOwner() const { return DestNavMesh; }
TSharedPtr ARecastNavMesh::NavDataGenerator
FNavDataGenerator* GetGenerator() { return NavDataGenerator.Get(); }
//在整个帧中存储标记为脏的区域,在Tick函数中每帧处理一次
TArray FNavigationDirtyAreasController::DirtyAreas;
FNavigationDirtyAreasController::Tick
ANavigationData::RebuildDirtyAreas(const TArray& DirtyAreas)
FRecastNavMeshGenerator::RebuildDirtyAreas(const TArray& InDirtyAreas)
UNavigationSystemV1::ConditionalPopulateNavOctree()
UNavigationSystemV1::AddLevelToOctree(ULevel& Level)
FNavigationDataHandler::AddLevelCollisionToOctree(ULevel& Level)
FRecastNavMeshGenerator::ExportVertexSoupGeometry
OctreeController
DirtyAreasController 收集数据方式二
方式二:FNavMeshSceneProxyData::GatherData
//测试拥代理方式获取网格数据:FNavMeshSceneProxyData
void UNavMeshRenderingComponent::GatherData(const ARecastNavMesh& NavMesh, FNavMeshSceneProxyData& OutProxyData) const
{
const int32 DetailFlags = OutProxyData.GetDetailFlags(&NavMesh);
TArray EmptyTileSet;
OutProxyData.GatherData(&NavMesh, DetailFlags, EmptyTileSet);
}
TArray FNavMeshSceneProxyData::MeshBuilders;
struct FDebugMeshData
{
TArray Vertices; //顶点
TArray Indices; //索引
FColor ClusterColor; //颜色
}; 8.2绘制方法
参考:DrawDebugHelpers.h
/** Flush persistent lines */
ENGINE_API void FlushPersistentDebugLines(const UWorld* InWorld);
ENGINE_API void DrawDebugMesh(const UWorld* InWorld, TArray const& Verts, TArray const& Indices, FColor const& Color, bool bPersistent=false, float LifeTime=-1.f, uint8 DepthPriority = 0);
/** Draw a debug box */
ENGINE_API void DrawDebugBox(const UWorld* InWorld, FVector const& Center, FVector const& Extent, FColor const& Color, bool bPersistentLines = false, float LifeTime=-1.f, uint8 DepthPriority = 0, float Thickness = 0.f);
ENGINE_API void DrawDebugLine(const UWorld* InWorld, FVector const& LineStart, FVector const& LineEnd, FColor const& Color, bool bPersistentLines = false, float LifeTime=-1.f, uint8 DepthPriority = 0, float Thickness = 0.f);