每个任务被赋予不同的优先级等级,从0 级到最低优先级OS_LOWEST_PR1O,包括0 和
OS_LOWEST_PR1O 在内。当μC/OS-Ⅱ初始化的时候,最低优先级OS_LOWEST_PR1O 总是被赋给空闲任务idle task 。注意,最多任务数目OS_MAX_TASKS 和最低优先级数是没有关系的。用户应用程序可以只有10 个任务,而仍然可以有32 个优先级的级别(如果用户将最低优先级数设为31 的话)。
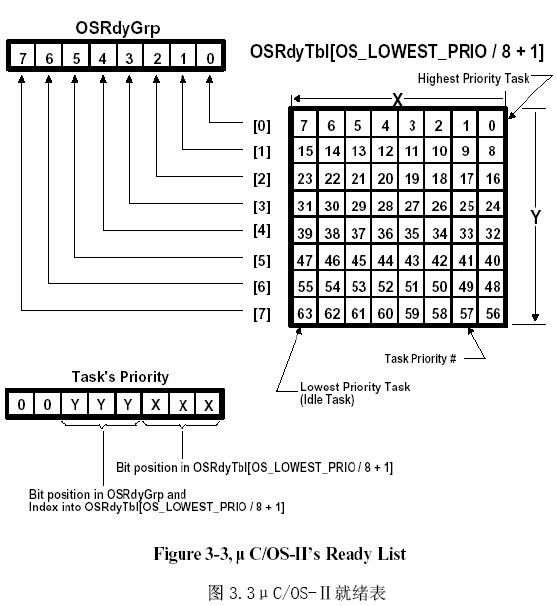
每个任务的就绪态标志都放入就绪表中的,就绪表中有两个变量OSRedyGrp 和OSRdyTbl[]。在OSRdyGrp 中,任务按优先级分组,8 个任务为一组。OSRdyGrp 中的每一位表示8 组任务中每一组中是否有进入就绪态的任务。任务进入就绪态时,就绪表OSRdyTbl[] 中的相应元素的相应位也置位。就绪表OSRdyTbl[] 数组的大小取决于OS_LOWEST_PR1O。当用户的应用程序中任务数目比较少时,减少OS_LOWEST_PR1O 的值可以降低μC/OS-Ⅱ对RAM(数据空间)的需求量。
为确定下次该哪个优先级的任务运行了,内核调度器总是将OS_LOWEST_PR1O 在就绪表中相应字节的相应位置1。OSRdyGrp 和OSRdyTbl[] 之间的关系见图3.3,是按以下规则给出的:
当OSRdyTbl[0] 中的任何一位是1 时,OSRdyGrp 的第0 位置1,
当OSRdyTbl[1] 中的任何一位是1 时,OSRdyGrp 的第1 位置1,
当OSRdyTbl[2] 中的任何一位是1 时,OSRdyGrp 的第2 位置1,
当OSRdyTbl[3] 中的任何一位是1 时,OSRdyGrp 的第3 位置1,
当OSRdyTbl[4] 中的任何一位是1 时,OSRdyGrp 的第4 位置1,
当OSRdyTbl[5] 中的任何一位是1 时,OSRdyGrp 的第5 位置1,
当OSRdyTbl[6] 中的任何一位是1 时,OSRdyGrp 的第6 位置1,
当OSRdyTbl[7] 中的任何一位是1 时,OSRdyGrp 的第7 位置1,
用于将任务放入就绪表,Prio 是任务的优先级。
OSRdyGrp |= OSMapTbl[prio >> 3];
OSRdyTbl[prio >> 3] |= OSMapTbl[prio & 0x07];
OSMapTbl[] 的值:

任务优先级的低三位用于确定任务在总就绪表OSRdyTbl[] 中的所在位。接下去的三位用于确定是在OSRdyTbl[] 数组的第几个元素。OSMapTbl[] 是在ROM 中的屏蔽字,用于限制OSRdyTbl[] 数组的元素下标在0 到7 之间,如果一个任务被删除了,则用 下面代码做求反处理。
if ((OSRdyTbl[prio >> 3] &= ~OSMapTbl[prio & 0x07]) == 0)
OSRdyGrp &= ~OSMapTbl[prio >> 3];
以上代码将就绪任务表数组OSRdyTbl[] 中相应元素的相应位清零,而对于OSRdyGrp, 只有当被删除任务所在任务组中全组任务一个都没有进入就绪态时,才将相应位清零。也就是说OSRdyTbl[prio>>3] 所有的位都是零时,OSRdyGrp 的相应位才清零。为了找到那个进入就绪态的优先级最高的任务,并不需要从OSRdyTbl[0] 开始扫描整个就绪任务表,只需要查另外一张表,即优先级判定表OSUnMapTbl([256]) 。
OSRdyTbl[] 中每个字节的8 位代表这一组的8 个任务哪些进入就绪态了,低位的优先级高于高位。利用这个字节为下标来查OSUnMapTbl 这张表,返回的字节就是该组任务中就绪态任务中优先级最高的那个任务所在的位置。这个返回值在0 到7 之间。确定进入就绪态的优先级最高的任务是用以下代码完成的,
y = OSUnMapTbl[OSRdyGrp];
x = OSUnMapTbl[OSRdyTbl[y]];
prio = (y << 3) + x;
例如,如果OSRdyGrp 的值为二进制01101000,查OSUnMapTbl[OSRdyGrp] 得到的值是3, 它相应于OSRdyGrp 中的第3 位bit3,这里假设最右边的一位是第0 位bit0 。类似地,如果OSRdyTbl[3]的值是二进制11100100, 则OSUnMapTbl[OSRdyTbc[3]] 的值是2,即第2 位。于是任务的优先级Prio 就等于26(3*8+2)。利用这个优先级的值。查任务控制块优先级表OSTCBPrioTbl[],得到指向相应任务的任务控制块OS_TCB 的工作就完成了。
INT8U const OSMapTbl[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80};
INT8U const OSUnMapTbl[] = {
0, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x00 to 0x0F
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x10 to 0x1F
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x20 to 0x2F
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x30 to 0x3F
6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x40 to 0x4F
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x50 to 0x5F
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x60 to 0x6F
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x70 to 0x7F
7, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x80 to 0x8F
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0x90 to 0x9F
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xA0 to 0xAF
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xB0 to 0xBF
6, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xC0 to 0xCF
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xD0 to 0xDF
5, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0, /* 0xE0 to 0xEF
4, 0, 1, 0, 2, 0, 1, 0, 3, 0, 1, 0, 2, 0, 1, 0 /* 0xF0 to 0xFF
};

 OSInit
OSInit