quinn源码解析:QUIC数据包是如何发送的
quinn源码解析:QUIC数据包是如何发送的
- 简介
- QUIC协议中的概念
-
- endpoint(端点)
- connection(连接)
- Stream(流)
- Frame (帧)
- 发包过程解析
-
- SendStream::write_all
- ConnectionDriver
- EndpointDriver
简介
quinn是Rust编程语言中用于实现QUIC(Quick UDP Internet Connections)协议的一个crate(包)。它提供了一个高级别的API,用于构建基于QUIC的网络应用程序。quinn crate的设计目标是提供一个简洁、安全和高性能的QUIC实现。它内部使用了Rust的异步编程模型(async/await),使得编写异步网络代码更加方便和高效。
本文主要介绍其发送数据的流程
QUIC协议中的概念
endpoint(端点)
在QUIC(Quick UDP Internet Connections)协议中,Endpoint(端点)是指QUIC连接的一端,可以是客户端或服务器。每个端点都有自己的网络地址,并与其他端点进行通信以建立和管理QUIC连接。在quinn中,endpoint对应一个操作系统的socket。例如client的Endpoint创建时就是bind了一个本地的地址。
pub fn client(addr: SocketAddr) -> io::Result<Self> {
let socket = std::net::UdpSocket::bind(addr)?;
let runtime = default_runtime()
.ok_or_else(|| io::Error::new(io::ErrorKind::Other, "no async runtime found"))?;
Self::new_with_runtime(
EndpointConfig::default(),
None,
runtime.wrap_udp_socket(socket)?,
runtime,
)
}
connection(连接)
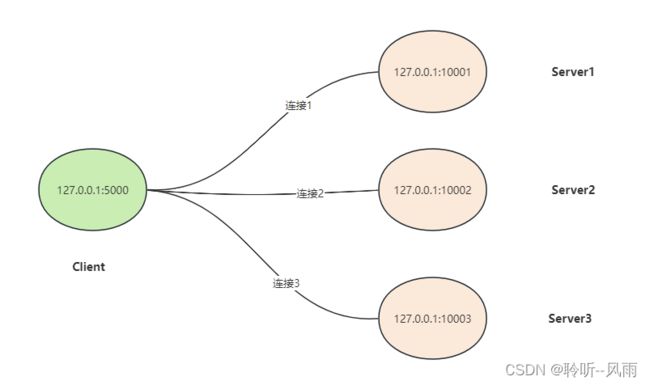
两个endpoint之间可以建立connection,并且一个endpoint可以向多个endpoint建立连接。
注意与TCP不同的是,QUIC的一个socket可以同时向多个其他socket建立连接。而TCP中每一个连接都对应client和server端的两个socket。
Stream(流)
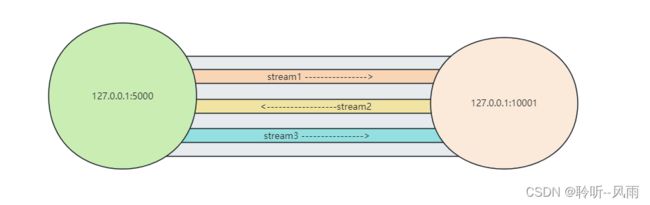
一条连接可以同时存在多条流,每条流上的数据相互独立,一条流发生阻塞不会影响其他流。(TCP相当于只有一条流,所以会有对头阻塞的缺陷。)
client的流ID为奇数,server的流ID为偶数
Frame (帧)
流是抽象出的概念,而实际上在链路上传输的只是不同的帧,不同流的帧中会有流ID用于标识此帧属于哪条流,接收端收到后根据流ID将对应的帧放入对应的流缓冲区。

发包过程解析
以官方的client Example为例。其关键步骤如下述伪代码所示,主要包括:创建endpoint、创建连接、创建流、最后写入数据。
//创建endpoint
let mut endpoint = quinn::Endpoint::client("[::]:0".parse().unwrap())?;
...
//创建连接
let conn = endpoint
.connect(remote, host)?
.await
.map_err(|e| anyhow!("failed to connect: {}", e))?;
//创建流
let (mut send, mut recv) = conn
.open_bi()
.await
.map_err(|e| anyhow!("failed to open stream: {}", e))?;
//写数据
send.write_all(request.as_bytes())
.await
.map_err(|e| anyhow!("failed to send request: {}", e))?;
SendStream::write_all
首先我们以流写入数据为切入点来看。
write_all接口实际上是产生了一个WriteAll的Future,数据会暂时放在WriteAll结构体里。当Runtime(默认为Tokio的运行时)下一次poll此Future时才会将数据写入到该流的缓冲区中。
impl<'a> Future for WriteAll<'a> {
type Output = Result<(), WriteError>;
fn poll(self: Pin<&mut Self>, cx: &mut Context) -> Poll<Self::Output> {
let this = self.get_mut();
loop {
if this.buf.is_empty() {
return Poll::Ready(Ok(()));
}
let buf = this.buf;
#将数据写入缓冲区
let n = ready!(this.stream.execute_poll(cx, |s| s.write(buf)))?;
this.buf = &this.buf[n..];
}
}
}
注意向流的缓冲区写数据时,是经过了流控逻辑的:当可写空间为0时,写操作会被block。可写空间一般由send_window-unacked_data,send_window和unacked_data都是连接级的,所有流都受此限制。send_window是开始时设置的,此值决定整个连接的发送缓冲区的峰值大小。当应用连接数较多时应该谨慎设置此值,避免因内存占用过多而引起OOM。
/// Returns the maximum amount of data this is allowed to be written on the connection
pub(crate) fn write_limit(&self) -> u64 {
(self.max_data - self.data_sent).min(self.send_window - self.unacked_data)
}
写入的数据最终又被暂时放在SendBuffer的unacked_segments里。
impl SendBuffer {
/// Append application data to the end of the stream
pub(super) fn write(&mut self, data: Bytes) {
self.unacked_len += data.len();
self.offset += data.len() as u64;
self.unacked_segments.push_back(data);
}
}
到这里,write_all这个操作就算是结束了。那么放入缓冲区的数据又是如何进一步被发送的呢?
ConnectionDriver
我们把视线回到 endpoint.connect(remote, host)?.await,在连接建立时,产生了一个ConnectionDriver的Future,此ConnectionDriver一产生就被丢进runtime中去持续地执行了。
runtime.spawn(Box::pin(
ConnectionDriver(conn.clone()).instrument(Span::current()),
));
而这个ConnectionDriver在被poll时最终会调用Connection::poll_transmit–>Connection::populate_packet获取将要发送的帧
fn populate_packet(
&mut self,
now: Instant,
space_id: SpaceId,
buf: &mut BytesMut,
max_size: usize,
pn: u64,
) -> SentFrames {
let mut sent = SentFrames::default();
...
...
// STREAM
if space_id == SpaceId::Data {
sent.stream_frames = self.streams.write_stream_frames(buf, max_size);
self.stats.frame_tx.stream += sent.stream_frames.len() as u64;
}
sent
}
StreamsState::write_stream_frames方法中从优先级队列中取出优先级最高的流并将其数据写入buf,如果流的数据都已发送完毕则将此流从优先级队列中取出。
pub(crate) fn write_stream_frames(
&mut self,
buf: &mut BytesMut,
max_buf_size: usize,
) -> StreamMetaVec {
let mut stream_frames = StreamMetaVec::new();
while buf.len() + frame::Stream::SIZE_BOUND < max_buf_size {
if max_buf_size
.checked_sub(buf.len() + frame::Stream::SIZE_BOUND)
.is_none()
{
break;
}
//不同优先级的数量
let num_levels = self.pending.len();
//获取优先级最高的队列
let mut level = match self.pending.peek_mut() {
Some(x) => x,
None => break,
};
// Poppping data from the front of the queue, storing as much data
// as possible in a single frame, and enqueing sending further
// remaining data at the end of the queue helps with fairness.
// Other streams will have a chance to write data before we touch
// this stream again.
//从队列中拿到第一个流
let id = match level.queue.get_mut().pop_front() {
Some(x) => x,
None => {
debug_assert!(
num_levels == 1,
"An empty queue is only allowed for a single level"
);
break;
}
};
//拿到具体的流
let stream = match self.send.get_mut(&id) {
Some(s) => s,
// Stream was reset with pending data and the reset was acknowledged
None => continue,
};
// Reset streams aren't removed from the pending list and still exist while the peer
// hasn't acknowledged the reset, but should not generate STREAM frames, so we need to
// check for them explicitly.
if stream.is_reset() {
continue;
}
// Now that we know the `StreamId`, we can better account for how many bytes
// are required to encode it.
let max_buf_size = max_buf_size - buf.len() - 1 - VarInt::size(id.into());
//从流中获取到本次要写的偏移量
let (offsets, encode_length) = stream.pending.poll_transmit(max_buf_size);
//如果流中的数据都已经发送完,则将此流从pending队列中移除
let fin = offsets.end == stream.pending.offset()
&& matches!(stream.state, SendState::DataSent { .. });
if fin {
stream.fin_pending = false;
}
if stream.is_pending() {
if level.priority == stream.priority {
// Enqueue for the same level
level.queue.get_mut().push_back(id);
} else {
// Enqueue for a different level. If the current level is empty, drop it
if level.queue.borrow().is_empty() && num_levels != 1 {
// We keep the last level around even in empty form so that
// the next insert doesn't have to reallocate the queue
PeekMut::pop(level);
} else {
drop(level);
}
push_pending(&mut self.pending, id, stream.priority);
}
} else if level.queue.borrow().is_empty() && num_levels != 1 {
// We keep the last level around even in empty form so that
// the next insert doesn't have to reallocate the queue
PeekMut::pop(level);
}
let meta = frame::StreamMeta { id, offsets, fin };
trace!(id = %meta.id, off = meta.offsets.start, len = meta.offsets.end - meta.offsets.start, fin = meta.fin, "STREAM");
//写入帧的头部
meta.encode(encode_length, buf);
// The range might not be retrievable in a single `get` if it is
// stored in noncontiguous fashion. Therefore this loop iterates
// until the range is fully copied into the frame.
let mut offsets = meta.offsets.clone();
while offsets.start != offsets.end {
let data = stream.pending.get(offsets.clone());
offsets.start += data.len() as u64;
//写入具体数据
buf.put_slice(data);
}
stream_frames.push(meta);
}
stream_frames
}
到了这里,要发送的数据实际上还是暂存在缓冲区了。然后又以EndpointEvent::Transmit事件的方式通过channel发送到endpoint的协程里。
fn drive_transmit(&mut self) -> bool {
let now = Instant::now();
let mut transmits = 0;
let max_datagrams = self.socket.max_transmit_segments();
let capacity = self.inner.current_mtu();
let mut buffer = BytesMut::with_capacity(capacity as usize);
while let Some(t) = self.inner.poll_transmit(now, max_datagrams, &mut buffer) {
transmits += match t.segment_size {
None => 1,
Some(s) => (t.size + s - 1) / s, // round up
};
// If the endpoint driver is gone, noop.
let size = t.size;
//将要发送的数据发送到endpoint协程
let _ = self.endpoint_events.send((
self.handle,
EndpointEvent::Transmit(t, buffer.split_to(size).freeze()),
));
if transmits >= MAX_TRANSMIT_DATAGRAMS {
// TODO: What isn't ideal here yet is that if we don't poll all
// datagrams that could be sent we don't go into the `app_limited`
// state and CWND continues to grow until we get here the next time.
// See https://github.com/quinn-rs/quinn/issues/1126
return true;
}
}
false
}
ConnectionDriver的任务到这里就完成了,总的来说ConnectionDriver的任务就是从流中取出数据,并最终将数据通过channel发送给endpoint
EndpointDriver
与connection的逻辑类似,endpoints建立时就已经spawn了一个EndpointDriver在后台一直poll,正是在poll方法中会处理来自ConnectionDriver发来的events,并写入outgoing缓冲区中。
fn handle_events(&mut self, cx: &mut Context, shared: &Shared) -> bool {
use EndpointEvent::*;
for _ in 0..IO_LOOP_BOUND {
match self.events.poll_recv(cx) {
Poll::Ready(Some((ch, event))) => match event {
...
...
//接受从ConnectionDriver发过来的Transmit,并写入到outgoing缓冲区中
Transmit(t, buf) => {
let contents_len = buf.len();
self.outgoing.push_back(udp_transmit(t, buf));
self.transmit_queue_contents_len = self
.transmit_queue_contents_len
.saturating_add(contents_len);
}
},
Poll::Ready(None) => unreachable!("EndpointInner owns one sender"),
Poll::Pending => {
return false;
}
}
}
true
}
在drive_send中从outgoing缓冲区中取出数据并写入socket
fn drive_send(&mut self, cx: &mut Context) -> Result<bool, io::Error> {
self.send_limiter.start_cycle();
let result = loop {
if self.outgoing.is_empty() {
break Ok(false);
}
if !self.send_limiter.allow_work() {
break Ok(true);
}
//实际写入
match self.socket.poll_send(cx, self.outgoing.as_slices().0) {
Poll::Ready(Ok(n)) => {
let contents_len: usize =
self.outgoing.drain(..n).map(|t| t.contents.len()).sum();
self.transmit_queue_contents_len = self
.transmit_queue_contents_len
.saturating_sub(contents_len);
// We count transmits instead of `poll_send` calls since the cost
// of a `sendmmsg` still linearly increases with number of packets.
self.send_limiter.record_work(n);
}
Poll::Pending => {
break Ok(false);
}
Poll::Ready(Err(e)) => {
break Err(e);
}
}
};
self.send_limiter.finish_cycle();
result
}
至此,整个发送过程就算完了。写入socket的数据由具体的操作系统底层去实现了。