李沐深度学习 4.5 权重衰减的知识梳理与课后习题
知识梳理与总结
- 4.5 权重衰减
- 一些个人理解:
- 完整可运行的代码
- 课后习题
- 笔者在写代码中遇到的坑
嗨嗨嗨,欢迎来到小明的知识总结和知识梳理,
如果需要学习打卡和讨论的童鞋请进入扣扣裙:908720512,打卡到达一定天数或讨论的内容很深入可以获得小礼品哦!!!!快来吧!!!!最重要的是如果这一章的代码报错,也可以在群里得到解答!!!!
声明:以下解答都是笔者自己自学后的理解,如果不妥请指正
4.5 权重衰减
我们先来看看书上的描述:在训练参数化机器学习模型时,权重衰减(weight decay)是最广泛使用的正则化的技术之一,它通常也被称为l2正则化,这项技术通过函数与零的距离来衡量函数的复杂度。
笔者的理解:传入函数的自变量的值越大,那么函数就越复杂,计算所花的成本就越高,而权重w和损失函数loss的关系就是这样,因此我们就想要w尽量的小,就要给他一个范围来限定。
我们来看看表达式,(注意这里的l2范数的表达式右上角有一个平方,为什么要有一个平方呢?李沐深度学习的书里讲了答案,希望大家能去看看,自己动手丰衣足食嘛):

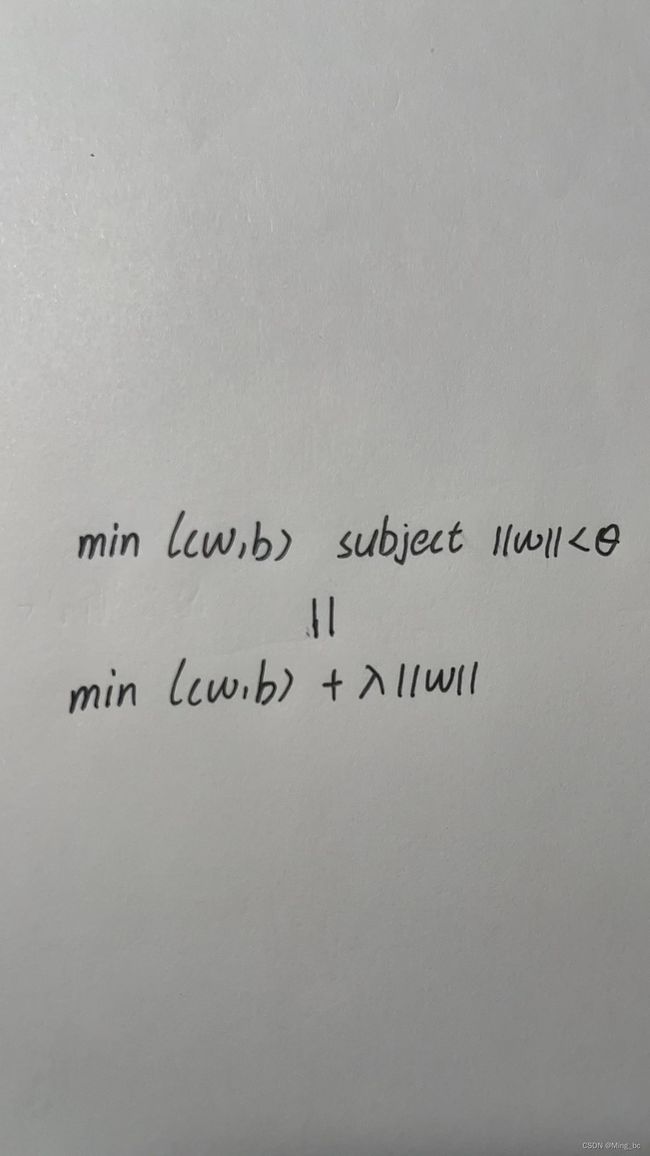
但是这样写有一个问题,我们如何用代码来表示这一个式子呢?在书中沐神也给了一个式子:
如何来理解这个式子呢?笔者认为λ是一个超参数,比如:你的λ是无穷大的话,那么你要想这个表达是尽可能的小,那么你就要让你的w尽可能的小,那么既然图一和图二是等式,那么λ和θ的关系是什么呢?当θ为0的时候,λ就是无穷大,那么要想整个表达式的值最小,就要w取到0,也就是;当θ为无穷大的时候,λ就是0,就意味着,w的值可以任意取。不知道这样说读者是否可以理解,笔者认为这一章的难点就在这。如果还有疑问可以进入扣扣裙:908720512。
那么梯度下降的公式就可以变成:
笔者在看到这个公式和后面给的代码的时候有个疑问,既然梯度下降的公式变了,那么优化器为什么没有改变,因为在第三章中沐神,给出的优化器的作用就是来更新参数。那么按照道理来说也需要一个相应的优化器吧。其实这就是固定化思维带来的坏处,如果当时想到可以在其他地方实现,也不会困扰我那么久。
言归正传:梯度更新最开始规则的是w=w - lr * w,然而图三的思想就是限制w,那么我们能不能不改动原始代码和函数的基础上来实现呢?我认为改变损失函数是最简单的做法。因为通过图二求偏导求出来的w,已经对w进行了限制,也就是说通过图二求偏导求出来的w,再加上最开始的sgd的参数更新方法就等价于图三。
如果你坚持看到这,恭喜你这一章最难的点你已经度过了。
一些个人理解:
1.权重衰减就是l2范数正则化,也就是惩罚参数w
2.防止过拟合的的思路:(1)降低模型的复杂度,(2)减小模型参数的取值范围
完整可运行的代码
%matplotlib inline
import torch
from torch import nn
from d2l import torch as d2l
n_train, n_test, num_inputs, batch_size = 20, 100, 200, 5
true_w, true_b = torch.ones((num_inputs, 1)) * 0.01, 0.05
train_data = d2l.synthetic_data(true_w, true_b, n_train)
train_iter = d2l.load_array(train_data, batch_size)
test_data = d2l.synthetic_data(true_w, true_b, n_test)
test_iter = d2l.load_array(test_data, batch_size, is_train=False)
def init_params():
w = torch.normal(0, 1, size=(num_inputs, 1), requires_grad=True)
b = torch.zeros(1, requires_grad=True)
return [w, b]
def train(lambd):
w, b = init_params()
net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_loss
num_epochs, lr = 100, 0.003
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
for epoch in range(num_epochs):
for X, y in train_iter:
# 增加了L2范数惩罚项,
# 广播机制使l2_penalty(w)成为一个长度为batch_size的向量
l = loss(net(X), y) + lambd * l2_penalty(w)
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1, (d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数是:', torch.norm(w).item())
# lambd就是确定图二中的超参数
train(lambd=0)
课后习题
1.在本节的估计问题中使用λ的值进行实验。绘制训练和测试精度关于λ的函数图。观察到了什么?
def train_2(num):
w, b = init_weights(num_inputs)
net, loss = lambda X: d2l.linreg(X, w, b), d2l.squared_loss
num_epochs, lr = 100, 0.03
animator = d2l.Animator(xlabel='lambda', ylabel='loss', yscale='log',
xlim=[0.1, 1],legend=['train', 'test'])
for lamda in np.arange(0, num + 0.1, 0.1):
for i in range(num_epochs):
for X, y in train_iter:
l = loss(net(X), y) + lamda * l2_penalty(w)
l.sum().backward()
d2l.sgd([w, b], lr, batch_size)
animator.add(lamda, (d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的l2范数是', torch.norm(w).item())
结果:

从曲线本身来讲,
(1)train是呈现递增,而test是呈现递减。
(2)λ越小train和test的loss值差距就越大,λ越大则反过来
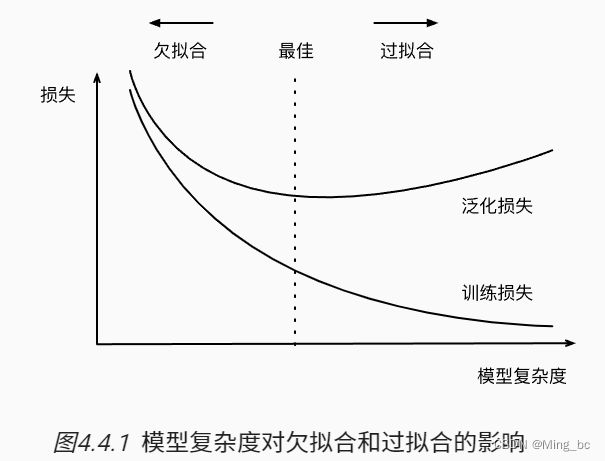
那么超参数的选择是不是就越大越好呢?不是的,笔者认为这就和下面这张图选择类似,我们应该选在中间:
2.使用验证集来找到最佳值λ。它真的是最优值吗?
回答:我认为并不是这样,笔者在第一题中回答了这个问题,应该选择中间的点。
3.如果我们使用l1范数作为我们选择的惩罚,那么更新方程会是什么样子?
4.我们知道那边。能找到类似的矩阵方程吗(见 2.3.10节 中的Frobenius范数)?
5.回顾训练误差和泛化误差之间的关系。除了权重衰减、增加训练数据、使用适当复杂度的模型之外,还能想出其他什么方法来处理过拟合?
回答:加入dropout层,随机冻结一些参数
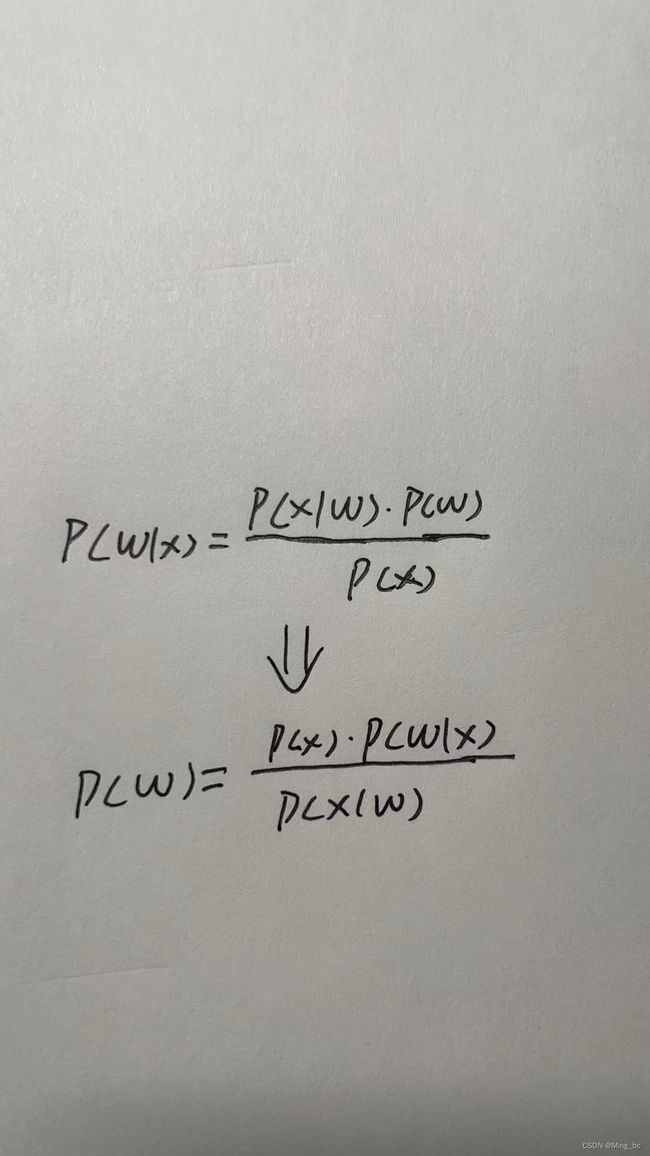
6.在贝叶斯统计中,我们使用先验和似然的乘积,通过公式得到后验。如何得到带正则化的?
笔者在写代码中遇到的坑
1.range()方法没有办法生成0到1之间的浮点数,他只能生成整数。