【YOLOv8/RT-DETR】“预测+追踪”以及result结果处理
本人最近正在使用YOLOv8和RT-DETR两个模型做小目标检测方面的研究,YOLOv8相信大家已经耳熟能详,而RT-DETR是百度新开发的一款实时目标检测模型,是基于VIT算法的。尽管用的推理框架与YOLOv8不属于同一派别,但目前也已经集成到了YOLOv8的Ultralytics中,无论是预测、追踪还是结果处理与YOLOv8的方式都是一样的。本文在已经训练好模型的情况下,使用模型进行预测+追踪,并对追踪返回的results结果进行解析和处理。
目录
1 预测+追踪(predict + track)
1.1 直接调用官方封装的方法
1.2 视频流处理时遇到的问题
1.3 自定义追踪方法
2 results结果解析和处理
2.1 results包含的参数
2.2 结果获取与简单处理
1 预测+追踪(predict + track)
官方关于预测(predict)的文档:Predict - Ultralytics YOLOv8 Docs
官方关于追踪(track)的文档:Track - Ultralytics YOLOv8 Docs
1.1 直接调用官方封装的方法
由于ultralytics包对于predict和track方法都已经封装好,因此只要直接调用就可以,如下面的代码:
from ultralytics.models import YOLO,RTDETR
# 初始化模型
model = YOLOv8(weights_path)
model = RTDETR(weights_path) # weights_path为指向训练好的权重文件的路径
# 调用track方法进行追踪
results = model.track(
source=source_path, # 待处理视频的地址,如果是webcam实时录制处理,则source=0
stream=True, # 对于视频采用流模式处理,防止因为因为堆积而内存溢出
# show=True, # 实时推理演示
tracker="botsort.yaml", # 默认tracker为botsort
save=True, # 选择是否保存处理后的视频
save_dir=save_path, # 处理视频的保存路径
# vid_stride=2, # 视频帧数的步长,即隔几帧检测跟踪一次
# save_txt=True, # 把结果以txt形式保存
# save_conf=True, # 保存置信度得分
# save_crop=True, # 保存剪裁的图像
conf=0.4, # 规定阈值,即低于该阈值的检测框会被剔除
iou=0.5, # 交并比阈值,用于去除同一目标的冗余框
device=0, # 用GPU进行推理,如果使用cpu,则为device="cpu"
)
# 对每一帧返回的结果进行处理
for r in results:
boxes = r.boxes # Boxes object for bbox outputs
masks = r.masks # Masks object for segment masks outputs
probs = r.probs # Class probabilities for classification outputs
# 加上自己的结果处理代码由于我进行的是小目标实时检测,因此处理的是视频流而不是单张图片,为了避免内存堆积导致程序崩溃,我选用了流模式处理方式,即stream=True,选用此处理方式,也就意味着在推理时每一帧都会返回一个results对象(关于results对象的解析在第2节),因此通过下面的for循环,我们可以轻松获取每一帧的结果(比如检测框对应的类别、置信度、位置,或是在某一帧的图像上进行二次绘制并保存等等)。
当然,我调用track是因为我有追踪的需求,如果仅仅是进行预测的话,将model.track替换为model.predict即可,要注意的是替换为predict之后有些参数是不能使用的,比如trakcer这个参数,它的意思是选用哪一种多目标跟踪算法(我选用的是botsort),如果仅仅是预测的话就不需要跟踪算法了。
关于predict和track的更多参数可以参考我在上面给出的官方文档链接。
1.2 视频流处理时遇到的问题
可能有些小伙伴在运行track代码的时候会遇到下面OMP的错误:

解决办法很简单,在代码前面加上这个就好啦:
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'True'1.3 自定义追踪方法
官方的track方法其实是已经封装好的了,其背后的原理就是:首先通过模型推理获取某一帧的results,接着根据results里面的信息对该帧的图片进行检测框及标签的绘制,最后合并为一个完整的视频。
因此,如果有友友觉得直接调用track方法自由度不高的话,也可以尝试bortsort提供的自定义追踪框架。自定义追踪框架的意义主要在于两个方面:
- 用户可以定义自己的bortsort追踪模型,也可以加入Reid机制;
- 用户可以更自由地绘制检测结果。
代码框架如下:
import cv2
import numpy as np
from pathlib import Path
from boxmot import BoTSORT
tracker = BoTSORT(
model_weights=Path('osnet_x0_25_msmt17.pt'), # which ReID model to use
device='cuda:0',
fp16=True,
)
vid = cv2.VideoCapture(0)
color = (0, 0, 255) # BGR
thickness = 2
fontscale = 0.5
while True:
ret, im = vid.read()
# substitute by your object detector, input to tracker has to be N X (x, y, x, y, conf, cls)
dets = np.array([[144, 212, 578, 480, 0.82, 0],
[425, 281, 576, 472, 0.56, 65]])
tracks = tracker.update(dets, im) # --> (x, y, x, y, id, conf, cls, ind)
xyxys = tracks[:, 0:4].astype('int') # float64 to int
ids = tracks[:, 4].astype('int') # float64 to int
confs = tracks[:, 5]
clss = tracks[:, 6].astype('int') # float64 to int
inds = tracks[:, 7].astype('int') # float64 to int
# in case you have segmentations or poses alongside with your detections you can use
# the ind variable in order to identify which track is associated to each seg or pose by:
# segs = segs[inds]
# poses = poses[inds]
# you can then zip them together: zip(tracks, poses)
# print bboxes with their associated id, cls and conf
if tracks.shape[0] != 0:
for xyxy, id, conf, cls in zip(xyxys, ids, confs, clss):
im = cv2.rectangle(
im,
(xyxy[0], xyxy[1]),
(xyxy[2], xyxy[3]),
color,
thickness
)
cv2.putText(
im,
f'id: {id}, conf: {conf}, c: {cls}',
(xyxy[0], xyxy[1]-10),
cv2.FONT_HERSHEY_SIMPLEX,
fontscale,
color,
thickness
)
# show image with bboxes, ids, classes and confidences
cv2.imshow('frame', im)
# break on pressing q
if cv2.waitKey(1) & 0xFF == ord('q'):
break
vid.release()
cv2.destroyAllWindows()下面给出一张我使用自定义模型推理出来的某一帧图片(主要是识别人和安全帽的):
2 results结果解析和处理
刚刚在第一节中已经知道,如果使用流模式处理视频,我们会逐帧获得一个results对象,而这个results对象对于我们的后续处理是非常重要的。以工地的小目标检测为例,我们需要从每一帧的results中获取当前的人数、工程车辆数等等,并且根据检测框所在的位置,判断当前工地是否有违规行为发生。这些都涉及到对于results结果的处理。
2.1 results包含的参数
根据官方文档的描述,result主要包含如下几个对象:
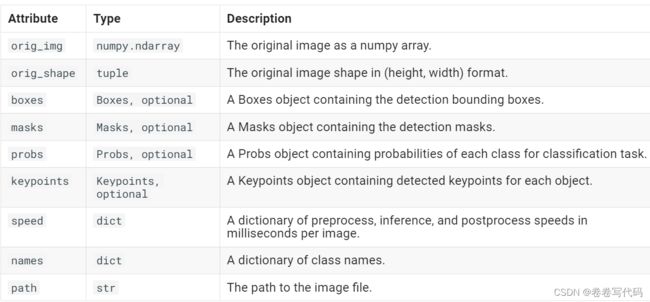
简单解释一下:
- orig_img: numpy数组格式的原图,可以在此原图上进行进一步绘制
- orig_shape:原图的shape
- boxes:十分重要的一个对象,包含所有检测框的信息
- masks:包含检测掩码的mask对象
- probs:一个包含分类任务中每个类别的概率的Probs对象
- keypoints:包含每个对象检测到的关键点
- speed:字典类型,表示以毫秒为单位的预处理、推理和后处理速度
- names:字典类型,表示所有类的名称
- path:图片的路径
其中,boxes比较重要,里面又包含了几个对象:
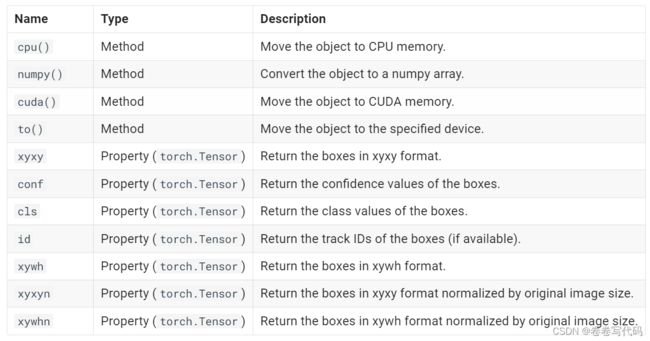
- xyxy/xywh/xyxyn/xywhn:这几个都是用于表示每个检测框的位置的
- conf:检测框对应的置信度
- cls:每个检测框对应的类别
- id:这个对象只有track时候才会有,赋予每个检测框唯一的标号
当然,其他几个对象在特定情况下也有很大用处,比如names可以用来输出看一下所有待检测目标的类名,keypoints对于关注人体姿态的小伙伴们会起到很大作用,orig_img可以供我们在此基础上进行绘制,等等。
2.2 结果获取与简单处理
1.1节中已经给出了track的代码,我们可以在此基础上对boxes等结果进行获取,代码如下:
from ultralytics import YOLO
# Load a pretrained YOLOv8n-cls Classify model
model = YOLO('xxx')
# Run inference on an image
results = model('xxx') # results list
for r in results:
boxes = r.boxes # Boxes object for bbox outputs
masks = r.masks # Masks object for segment masks outputs
probs = r.probs # Class probabilities for classification outputs在上面的for循环中,我们已经获取到了boxes对象,接下来可以进一步获取里面的几个参数。比如我想要对某一类检测框的数目作一个统计,代码如下:
import numpy as np
from ultralytics import YOLO
# Load a pretrained YOLOv8n-cls Classify model
model = YOLO('xxx')
# Run inference on an image
results = model('xxx') # results list
for r in results:
boxes = r.boxes # Boxes object for bbox outputs
class_ids = boxes.cls.cpu().numpy().astype(int) # 转为int类型数组
num = np.sum(class_ids == 0) # 对类别为0的检测框数目作一个统计当然,我们也可以仿照上面的格式,对所有目标检测框的位置作处理,如果要获取到精确的位置,建议用xyxy格式(因为本人根据实践发现,xywh框的位置相较于原图会有一些偏差,而xywhn和xyxyn是归一化之后的相对位置,主要是方便于训练时收敛的),在数据获取后要注意进行tensor和numpy类型的转换(根据实际需求选择)。
获取到的xyxy信息可以帮助我们处理很多实际问题,比如可以根据位置计算两个框之间的IoU来判断两个框是否重叠,也可以计算不同框之间的相对距离,判断人和大型机器是否保持在安全范围内。关于更多的计算细节,大家就要结合自己的应用场景自己摸索啦~
有时候,我们在处理一个视频时需要保存某一帧时的检测图片,这时候可以调用result的plot方法进行绘制,代码如下:
from PIL import Image
from ultralytics import YOLO
# Load a pretrained YOLOv8n model
model = YOLO('xxx')
# Run inference
results = model('xxx') # results list
# Show the results
for r in results:
im_array = r.plot() # plot a BGR numpy array of predictions
im = Image.fromarray(im_array[..., ::-1]) # RGB PIL image
im.show() # show image
im.save('results.jpg') # save image
按照官方文档所说,plot()里面也是有挺多可供选择的参数的,比如 r.plot(conf=False, line_width=1, font_size=1.5),就是规定了绘制的时候不显示置信度信息、设置检测框的宽度为1、标签字体大小为1.5。
当然,也可以在r.plot()的基础上进行进一步的绘制,可以使用自定义绘制方法,如下:
for r in results:
boxes = r.boxes # Boxes object for bbox outputs
# plot a BGR numpy array of predictions
im_array = r.plot(conf=False, line_width=1, font_size=1.5)
# 使用自定义的绘制方法,根据boxes进一步提取信息并绘制到图片上
custom_plot(im_array, boxes.xywh, boxes.xyxy, boxes.cls, boxes.id)本人关于results的处理方式也还在进一步挖掘中。YOLOv8由于实时性好、检测性强、对于结果的获取便利,因此可以用于各种各样不同的目标检测场景。并且钟爱RT-DETR的友友们也可以采用相同的结果获取方式,因为RT-DETR目前是被集成到了YOLO项目中的,results的格式与YOLO的一模一样~
新人发帖,多多关照 ~ 觉得有帮助的小朋友们点个赞吧! wink~