- STM32外部中断深度解析:从原理到实战应用—矩阵键盘中断驱动(中) | 零基础入门STM32第八十步
触角01010001
STM32入门教程(100步)stm32驱动开发单片机嵌入式硬件物联网
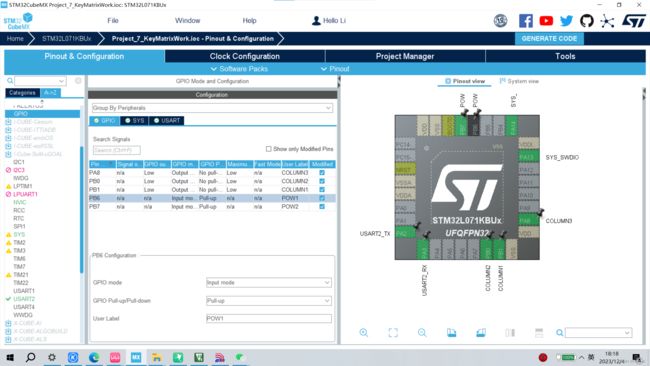
主题内容教学目的/扩展视频4x4阵列键盘电路连接,电路原理,驱动程序,调用函数。能用程序读出按键值。师从洋桃电子,杜洋老师文章目录一、系统整体架构设计1.1硬件连接拓扑1.2软件工作流程二、核心代码模块解析2.1主程序逻辑框架2.2中断初始化关键配置2.2.1RCC时钟配置2.2.2EXTI中断配置示例(PA4)三、中断处理机制详解3.1中断服务函数设计3.2中断标志位处理策略四、关键技术优化方案
- 第十三届蓝桥杯大赛软件赛省赛 C/C++ 大学 B 组C题 刷题统计
我是小趴菜一枚
算法蓝桥杯c++c语言
问题描述小明决定从下周一开始努力刷题准备蓝桥杯竞赛。他计划周一至周五每天做aa道题目,周六和周日每天做bb道题目。请你帮小明计算,按照计划他将在第几天实现做题数大于等于nn题?输入格式输入一行包含三个整数a,ba,b和nn.输出格式输出一个整数代表天数。样例输入102099样例输出8评测用例规模与约定对于50%50%的评测用例,1≤a,b,n≤1061≤a,b,n≤106.对于100%100%的评
- 珍藏!Java SpringBoot 精品源码合集约惠来袭,获取路径大公开
秋野酱
javaspringboot开发语言
技术范围:SpringBoot、Vue、SSM、HLMT、Jsp、PHP、Nodejs、Python、爬虫、数据可视化、小程序、安卓app、大数据、物联网、机器学习等设计与开发。主要内容:免费功能设计、开题报告、任务书、中期检查PPT、系统功能实现、代码编写、论文编写和辅导、论文降重、长期答辩答疑辅导、腾讯会议一对一专业讲解辅导答辩、模拟答辩演练、和理解代码逻辑思路。文末获取源码联系文末获取源码联
- 通过stm32最小系统板实现串口收发功能
超561
stm32学习笔记stm32嵌入式硬件单片机
使用时请确保系统时钟配置正确本文使用到两个串口其配置方式一样USART1初始化函数Usart1_InitvoidUsart1_Init(unsignedintbaud){GPIO_InitTypeDefgpio_initstruct;USART_InitTypeDefusart_initstruct;NVIC_InitTypeDefnvic_initstruct;RCC_APB2PeriphClo
- STM32最小系统板详解
QoyOle
stm32单片机嵌入式硬件
STM32最小系统板是一款基于STMicroelectronics的STM32微控制器的开发板,它提供了一个简化的硬件平台,用于快速原型设计和开发嵌入式系统。本文将详细介绍STM32最小系统板的特点、组成部分以及如何使用它进行开发。一、特点简化的硬件设计:STM32最小系统板采用了最小化的硬件设计,仅包含了必要的元件,如STM32微控制器、晶振、电源管理电路等。这使得开发者可以专注于软件开发,而无
- 螺旋折线 | 第九届蓝桥杯省赛C++B组
@Mr.stone
蓝桥杯c++算法
如下图所示的螺旋折线经过平面上所有整点恰好一次。对于整点(X,Y),我们定义它到原点的距离dis(X,Y)是从原点到(X,Y)的螺旋折线段的长度。例如dis(0,1)=3,dis(−2,−1)=9给出整点坐标(X,Y),你能计算出dis(X,Y)吗?输入格式包含两个整数X,Y。输出格式输出一个整数,表示dis(X,Y)。数据范围−109≤X,Y≤109输入样例:01输出样例:3题解:数学计算题目,
- 01.什么是MQTT?
墨先森
NodeMCU与MQTT物联网
目录00_前言01_简述02_特性03_MQTT运行机制00_前言本系列博客是基于NodeMCU平台来完成的一个物联网小项目,目的在于了解并学习MQTT协议,掌握MQTT协议的作用机制。以上。01_简述以下摘自百度百科MQTT(消息队列遥测传输)是ISO标准(ISO/IECPRF20922)下基于发布/订阅范式的消息协议。它工作在TCP/IP协议族上,是为硬件性能低下的远程设备以及网络状况糟糕的情
- 4G核心网的演变与创新:从传统到虚拟化的跨越
爱浦路 IPLOOK
4G核心网核心网
4G核心网随着移动通信技术的不断发展,4G核心网已经经历了从传统的硬件密集型架构到现代化、虚拟化网络架构的重大转型。这一演变不仅提升了网络的灵活性和可扩展性,也为未来的5G、物联网(LOT)和边缘计算等技术的发展奠定了基础。本文将探讨4G核心网的演变过程,重点分析虚拟化技术在其中的作用,并结合我们公司IPLOOK的创新产品和解决方案,展望未来核心网的发展趋势。传统4G核心网:硬件依赖与功能分离在4
- SGP.31/.32 规范以及它将如何影响物联网
SofterICer
eSIM物联网
去年,GSMA发布了适用于物联网设备的新eSIM远程配置标准的架构和要求、SGP.31eSIM物联网架构和网络受限和/或用户界面(UI)受限物联网设备中eUICC远程配置的要求。自SGP.31获得批准以来,业界一直在等待GSMA发布SGP.31的技术实施规范SGP.32。5月26日,GSMASGP.32eSIM物联网技术规范发布,为设备制造商开始受益于新标准并扩展其物联网项目铺平了道路。据物联网专
- 物联网(IoT)系统中,数据采集器拿来即用
小赖同学啊
人工智能智能硬件物联网
在物联网(IoT)系统中,数据采集器(也称为网关或数据集中器)扮演着至关重要的角色,主要负责从各种传感器和设备中收集数据,并将其转换为统一的格式后传输到云端或本地服务器进行处理和分析。以下是关于数据采集器的设计要点、功能需求以及实现方案:一、数据采集器的核心功能数据中转:从传感器、设备或其他数据源收集数据。将数据转发到云端、本地服务器或其他目标系统。数据格式统一化:将不同协议、不同格式的数据转换为
- 嵌入式Linux网络编程实战:基于libcurl实现Gitee文件上传
银河码
Linux网络编程linux网络giteec语言vscodetcp/ip服务器
嵌入式Linux网络编程实战:基于libcurl实现Gitee文件上传【本文代码已在立创·泰山派平台验证通过,可直接用于物联网设备数据上报场景】一、功能概述与实现效果1.1核心功能本地文件读取:支持任意二进制/文本文件Base64编码转换:符合RFC4648标准HTTP传输:通过libcurl实现,也可以使用HTTPS加密通信GiteeAPI对接:自动创建/更新仓库文件1.2运行效果演示#上传本地
- STM32F1基于HAL库的学习记录实用使用教程分享(五、PWM驱动舵机、呼吸灯)
藤樂.
STM32学习stm32学习数据库
往期内容STM32F1基于HAL库的学习记录实用使用教程分享(一、GPIO_Output)STM32F1基于HAL库的学习记录实用使用教程分享(二、GPIO_Input按键)STM32F1基于HAL库的学习记录实用使用教程分享(三、外部中断按键)STM32F1基于HAL库的学习记录实用使用教程分享(四、OLEDIIC驱动软件IIC硬件IIC)文章目录往期内容前言一、PWMPWM如何控制LED亮度?
- 利用AI与MySQL提升工业物联网健康监测的智慧水平——构建预测性维护的新纪元
墨夶
数据库学习资料1人工智能mysql物联网
在工业4.0和智能制造的大背景下,如何确保生产设备的高效稳定运行成为企业竞争力的核心要素之一。传统的事后维修方式已经难以满足现代制造业的需求,而基于人工智能(AI)的预测性维护系统则为这一挑战提供了全新的解决方案。今天,我们将深入探讨如何结合AI技术和MySQL数据库,打造一个智能、高效的工业物联网(IIoT)健康监测平台,助力企业在激烈的市场竞争中脱颖而出。一、为什么选择AI+MySQL?1.A
- 第十二届蓝桥杯C++青少年组中/高级组省赛2021年真题解析
码农StayUp
C++蓝桥杯青少年组真题解析蓝桥杯c++算法
一、单选题第1题下列符号中哪个在C++中表示行注释()。A:!B:#C:]D://答案:D在C++中,行注释的表示方式是使用双斜杠//。行注释是指从双斜杠开始直到该行的末尾,所有内容都会被编译器忽略,不会被编译和执行。第2题每个C++程序都必须有且仅有一个()A:函数B:预处理命令C:主函数D:语句答案:C每个C++程序都必须有且仅有一个主函数。第3题下列字特串中不可以用作C++变量名称的是()A
- 蓝桥杯web备赛----html篇
菥菥爱嘻嘻
蓝桥杯备赛前端蓝桥杯html
1、html写在前面,html相对简单,主要会考基础标签、html5新特性、html5本地存储、但是目前我还没有做到本地存储的题目1.1基础标签(1)、链接标签a:访问Examplehref:链接target:定义链接的打开方式。_blank:在新窗口或新标签页中打开链接。_self:在当前窗口或标签页中打开链接(默认)。_parent:在父框架中打开链接。_top:在整个窗口中打开链接,取消任何
- STM32 Cube MX 软件使用教程和技巧(纯干货分享~~!)
立量
嵌入式IDEstm32单片机嵌入式硬件
以下是关于STM32CubeMX的详细使用教程和一些实用技巧,帮助您快速上手并高效开发STM32项目:一、STM32CubeMX简介功能:ST官方推出的图形化配置工具,用于生成STM32微控制器的初始化代码(基于HAL库/LL库),支持引脚分配、时钟树配置、外设初始化等。优势:减少底层代码编写时间,避免手动配置寄存器,兼容多种IDE(Keil、IAR、STM32CubeIDE等)。二、基础使用教程
- 蓝桥杯单片机刷题——串口发送显示
lzb759
一个月备赛蓝桥杯单片机蓝桥杯单片机
设计要求通过串口接收字符控制数码管的显示,PC端发送字符'A',数码管显示'A',发送其它非法字符时,数码管显示'E'。数码管显示格式如下:备注:单片机IRC振荡器频率设置为12MHz。串口通信波特率:9600bps。按键模式:BTN;扩展方式:IO模式除字符'A'外,其它字符均为非法字符。个人代码#includecodeunsignedcharSeg_Table[]={0x88,//A00x86
- HTML5!进击2025web蓝桥杯复习之路
Deepsleep.
html5前端html
#HTML5全面解析##目录1.[HTML5简介](#1-html5-简介)2.[基本标签](#2-基本标签)3.[新特性](#3-新特性)4.[本地存储](#4-本地存储)5.[总结](#5-总结)---##1.HTML5简介HTML5是HTML的第五个主要版本,2014年由W3C正式发布。主要特性包括:-语义化标签-多媒体支持-图形绘制(Canvas/SVG)-本地存储能力-WebWorker
- 【STM32实物】基于STM32的扫地机器人/小车控制系统设计
阿齐Archie
单片机项目合集stm32机器人单片机mcu
基于STM32的扫地机器人/小车控制系统设计演示视频:基于STM32的扫地机器人小车控制系统设计简介:扫地机器人系统采用分层结构设计,主要包括底层硬件控制层、中间数据处理层和上层用户交互层。底层硬件控制层负责对各个硬件模块进行控制和数据采集,中间数据处理层负责对采集到的数据进行处理和解算,上层用户交互层负责与用户进行交互并显示系统状态信息。主控模块采用STM32F103C8T6开发板,具有高性能、
- 基于STM32单片机的智能清扫小车清扫机器人
CC呢
单片机stm32机器人
功能描述STM32单片机+循迹+避障+蓝牙控制+温度采集+声光报警+按键调节+OLED显示+风扇吸尘1.STM32单片机为控制核心2.通过ds18b20传感器测量环境温度3.OLED显示屏显示模式及测量的信息;4.通过红外循迹传感器可以实现小车沿黑线进行循迹清扫5.通过两路红外光电传感器进行避障,可以实现全屋随意清扫6.蓝牙通信,可以通过手机公共APP(蓝牙串口调试助手)实现控制小车的前进方向,遥
- 【STM32】智能避障红外小车
Alioooooooon
嵌入式stm32单片机嵌入式硬件
文章目录直流电机`motor.c/motor.h`红外对管红外循迹利用脉冲宽度调制技术(PWM)控制电机转速避障`red.c/red.h`编译环境:keil5SourceInsightSTM32F103X原理图:直流电机直流电机的原理:通电就会转,反向通电就会反转两极的电势差决定转速电机驱动模块以及接线参考图示代码实现:motor.c/motor.h#ifndef__MOTOR_H__#defin
- 基于Redis分布锁+事务补偿解决数据不一致性问题
yiridancan
并发编程Redis分布式redis数据库缓存
基于Redis的分布式设备库存服务设计与实现概述本文介绍一个基于Redis实现的分布式设备库存服务方案,通过分布式锁、重试机制和事务补偿等关键技术,保证在并发场景下库存操作的原子性和一致性。该方案适用于物联网设备管理、分布式资源调度等场景。代码实现importjava.util.HashMap;importjava.util.Map;importorg.slf4j.Logger;importorg
- stlink is not in the dfu mode,please restart it
litvm
bug解决经验分享
问题:Keil中使用stlink烧录代码时,提示需要更新驱动,点击更新后,提示:“STLINKisnotintheDFUmodeplesserestartit”,重新拔插之后,还是同样的问题解决方法:stlink已经连接了STM32F103(VCC,GND,SWCLK,SWDIO四个引脚),在连接状态下,插入电脑进行更新是不行的,也就是所谓的notinthedfumode。只需要把stlink与S
- STM32:关于NVIC的工作与优先级分组方式
sewinger
stm32学习笔记单片机嵌入式硬件stm32
一,NVIC是什么NVIC,全称是NestedVectoredInterruptController,即嵌套向量中断控制器。它是ARMCortex-M系列处理器内核的一个重要组成部分,主要用于管理中断请求,协调中断的优先级,以及控制中断的嵌套执行,使得处理器能够高效、有序地响应和处理多个中断源。这个名称是如何体现的,下面一一说明。二,“嵌套”体现在哪?NVIC的嵌套体现在它能够处理多个中断的嵌套执
- 于STM32F103C8T6的智能灯泡控制系统C++源码实现
程序员Thomas
STM32单片机智能灯泡stm32c++嵌入式硬件
以下是一个基于STM32F103C8T6的智能灯泡控制系统C++源码实现,整合了PWM调光、WiFi控制和环境感知功能。该代码已在STM32CubeIDE中验证,支持直接烧录运行:#include"main.h"#include#include"wifi.h"//LED设备抽象类(3设计)classLEDDevice{protected:TIM_HandleTypeDef*pwmTimer;uin
- 基于STM32的平衡车外设控制应用案例,提供C++源码
程序员Thomas
STM32单片机平衡车stm32c++单片机
基于STM32的平衡车外设控制应用案例**下面是一个使用STM32控制平衡车的简单应用案例,包含姿态传感器读取、电机控制和串口通信功能。主要功能使用MPU6050传感器读取姿态数据使用PID控制器调整平衡车姿态通过串口输出调试信息电机速度控制C++源代码#include"stm32f10x.h"#include//定义常量#definePWM_MIN1000#definePWM_MAX2000#d
- ESP32-C6助力设备互联互通,Wi-Fi6无线通信方案,物联网交互联动
深圳启明云端科技
WiFi6ESP32-C6乐鑫物联网无线方案
在物联网飞速发展的今天,连接技术的革新成为推动行业进步的关键力量。Wi-Fi6技术的出现,犹如一颗璀璨的新星,为物联网设备带来了前所未有的高效与低耗体验。乐鑫推出的ESP32-C6作为首款支持Wi-Fi6的SoC,集成了2.4GHzWi-Fi6、Bluetooth5(LE)和802.15.4协议,这一组合使其具备了行业领先的射频性能。其支持的上行、下行正交频分多址(OFDMA)接入和下行多用户多输
- 蓝桥杯2023年第十四届省赛真题-异或和之差
好好学习^按时吃饭
蓝桥杯
题目来自DOTCPP:思路:什么是异或和?①题目要求我们选择两个不相交的子段,我们可以枚举一个分界线i,子段1在i的左边,子段2在i的右边,分别找到子段1和子段2的最大值、最小值。②怎么确定这两个子段呢?根据:A^B=C-->A^C=B-->B^C=A。对于i左边的子段,我们是从前往后枚举的,因此可以先求出每个点的前缀异或和ls[i],ls[i]表示的是从0-i的子段的前缀异或和,我们在找到和ls
- Rust + 时序数据库 TDengine:打造高性能时序数据处理利器
涛思数据(TDengine)
时序数据库rusttdengine
引言:为什么选择TDengine与Rust?TDengine是一款专为物联网、车联网、工业互联网等时序数据场景优化设计的开源时序数据库,支持高并发写入、高效查询及流式计算,通过“一个数据采集点一张表”与“超级表”的概念显著提升性能。Rust作为一门系统级编程语言,近年来在数据库、嵌入式系统、分布式服务等领域迅速崛起,以其内存安全、高性能著称,与TDengine的高效特性天然契合,适合构建高可靠、高
- 蓝桥杯备赛计划
laitywgx
蓝桥杯职场和发展
1-2小时的蓝桥杯PythonB组冲刺日程表(持续1个月,聚焦高频考点):第一周:核心算法突破Day1(周一)学习重点:动态规划(01背包问题)学习资源:AcWing《蓝桥杯辅导课》第8讲(背包问题模板)代码模板速记:#一维01背包模板n,V=map(int,input().split())dp=[0]*(V+1)for_inrange(n):w,v=map(int,input().split()
- 继之前的线程循环加到窗口中运行
3213213333332132
javathreadJFrameJPanel
之前写了有关java线程的循环执行和结束,因为想制作成exe文件,想把执行的效果加到窗口上,所以就结合了JFrame和JPanel写了这个程序,这里直接贴出代码,在窗口上运行的效果下面有附图。
package thread;
import java.awt.Graphics;
import java.text.SimpleDateFormat;
import java.util
- linux 常用命令
BlueSkator
linux命令
1.grep
相信这个命令可以说是大家最常用的命令之一了。尤其是查询生产环境的日志,这个命令绝对是必不可少的。
但之前总是习惯于使用 (grep -n 关键字 文件名 )查出关键字以及该关键字所在的行数,然后再用 (sed -n '100,200p' 文件名),去查出该关键字之后的日志内容。
但其实还有更简便的办法,就是用(grep -B n、-A n、-C n 关键
- php heredoc原文档和nowdoc语法
dcj3sjt126com
PHPheredocnowdoc
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8">
<title>Current To-Do List</title>
</head>
<body>
<?
- overflow的属性
周华华
JavaScript
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/xhtml&q
- 《我所了解的Java》——总体目录
g21121
java
准备用一年左右时间写一个系列的文章《我所了解的Java》,目录及内容会不断完善及调整。
在编写相关内容时难免出现笔误、代码无法执行、名词理解错误等,请大家及时指出,我会第一时间更正。
&n
- [简单]docx4j常用方法小结
53873039oycg
docx
本代码基于docx4j-3.2.0,在office word 2007上测试通过。代码如下:
import java.io.File;
import java.io.FileInputStream;
import ja
- Spring配置学习
云端月影
spring配置
首先来看一个标准的Spring配置文件 applicationContext.xml
<?xml version="1.0" encoding="UTF-8"?>
<beans xmlns="http://www.springframework.org/schema/beans"
xmlns:xsi=&q
- Java新手入门的30个基本概念三
aijuans
java新手java 入门
17.Java中的每一个类都是从Object类扩展而来的。 18.object类中的equal和toString方法。 equal用于测试一个对象是否同另一个对象相等。 toString返回一个代表该对象的字符串,几乎每一个类都会重载该方法,以便返回当前状态的正确表示.(toString 方法是一个很重要的方法) 19.通用编程:任何类类型的所有值都可以同object类性的变量来代替。
- 《2008 IBM Rational 软件开发高峰论坛会议》小记
antonyup_2006
软件测试敏捷开发项目管理IBM活动
我一直想写些总结,用于交流和备忘,然都没提笔,今以一篇参加活动的感受小记开个头,呵呵!
其实参加《2008 IBM Rational 软件开发高峰论坛会议》是9月4号,那天刚好调休.但接着项目颇为忙,所以今天在中秋佳节的假期里整理了下.
参加这次活动是一个朋友给的一个邀请书,才知道有这样的一个活动,虽然现在项目暂时没用到IBM的解决方案,但觉的参与这样一个活动可以拓宽下视野和相关知识.
- PL/SQL的过程编程,异常,声明变量,PL/SQL块
百合不是茶
PL/SQL的过程编程异常PL/SQL块声明变量
PL/SQL;
过程;
符号;
变量;
PL/SQL块;
输出;
异常;
PL/SQL 是过程语言(Procedural Language)与结构化查询语言(SQL)结合而成的编程语言PL/SQL 是对 SQL 的扩展,sql的执行时每次都要写操作
- Mockito(三)--完整功能介绍
bijian1013
持续集成mockito单元测试
mockito官网:http://code.google.com/p/mockito/,打开documentation可以看到官方最新的文档资料。
一.使用mockito验证行为
//首先要import Mockito
import static org.mockito.Mockito.*;
//mo
- 精通Oracle10编程SQL(8)使用复合数据类型
bijian1013
oracle数据库plsql
/*
*使用复合数据类型
*/
--PL/SQL记录
--定义PL/SQL记录
--自定义PL/SQL记录
DECLARE
TYPE emp_record_type IS RECORD(
name emp.ename%TYPE,
salary emp.sal%TYPE,
dno emp.deptno%TYPE
);
emp_
- 【Linux常用命令一】grep命令
bit1129
Linux常用命令
grep命令格式
grep [option] pattern [file-list]
grep命令用于在指定的文件(一个或者多个,file-list)中查找包含模式串(pattern)的行,[option]用于控制grep命令的查找方式。
pattern可以是普通字符串,也可以是正则表达式,当查找的字符串包含正则表达式字符或者特
- mybatis3入门学习笔记
白糖_
sqlibatisqqjdbc配置管理
MyBatis 的前身就是iBatis,是一个数据持久层(ORM)框架。 MyBatis 是支持普通 SQL 查询,存储过程和高级映射的优秀持久层框架。MyBatis对JDBC进行了一次很浅的封装。
以前也学过iBatis,因为MyBatis是iBatis的升级版本,最初以为改动应该不大,实际结果是MyBatis对配置文件进行了一些大的改动,使整个框架更加方便人性化。
- Linux 命令神器:lsof 入门
ronin47
lsof
lsof是系统管理/安全的尤伯工具。我大多数时候用它来从系统获得与网络连接相关的信息,但那只是这个强大而又鲜为人知的应用的第一步。将这个工具称之为lsof真实名副其实,因为它是指“列出打开文件(lists openfiles)”。而有一点要切记,在Unix中一切(包括网络套接口)都是文件。
有趣的是,lsof也是有着最多
- java实现两个大数相加,可能存在溢出。
bylijinnan
java实现
import java.math.BigInteger;
import java.util.regex.Matcher;
import java.util.regex.Pattern;
public class BigIntegerAddition {
/**
* 题目:java实现两个大数相加,可能存在溢出。
* 如123456789 + 987654321
- Kettle学习资料分享,附大神用Kettle的一套流程完成对整个数据库迁移方法
Kai_Ge
Kettle
Kettle学习资料分享
Kettle 3.2 使用说明书
目录
概述..........................................................................................................................................7
1.Kettle 资源库管
- [货币与金融]钢之炼金术士
comsci
金融
自古以来,都有一些人在从事炼金术的工作.........但是很少有成功的
那么随着人类在理论物理和工程物理上面取得的一些突破性进展......
炼金术这个古老
- Toast原来也可以多样化
dai_lm
androidtoast
Style 1: 默认
Toast def = Toast.makeText(this, "default", Toast.LENGTH_SHORT);
def.show();
Style 2: 顶部显示
Toast top = Toast.makeText(this, "top", Toast.LENGTH_SHORT);
t
- java数据计算的几种解决方法3
datamachine
javahadoopibatisr-languer
4、iBatis
简单敏捷因此强大的数据计算层。和Hibernate不同,它鼓励写SQL,所以学习成本最低。同时它用最小的代价实现了计算脚本和JAVA代码的解耦,只用20%的代价就实现了hibernate 80%的功能,没实现的20%是计算脚本和数据库的解耦。
复杂计算环境是它的弱项,比如:分布式计算、复杂计算、非数据
- 向网页中插入透明Flash的方法和技巧
dcj3sjt126com
htmlWebFlash
将
Flash 作品插入网页的时候,我们有时候会需要将它设为透明,有时候我们需要在Flash的背面插入一些漂亮的图片,搭配出漂亮的效果……下面我们介绍一些将Flash插入网页中的一些透明的设置技巧。
一、Swf透明、无坐标控制 首先教大家最简单的插入Flash的代码,透明,无坐标控制: 注意wmode="transparent"是控制Flash是否透明
- ios UICollectionView的使用
dcj3sjt126com
UICollectionView的使用有两种方法,一种是继承UICollectionViewController,这个Controller会自带一个UICollectionView;另外一种是作为一个视图放在普通的UIViewController里面。
个人更喜欢第二种。下面采用第二种方式简单介绍一下UICollectionView的使用。
1.UIViewController实现委托,代码如
- Eos平台java公共逻辑
蕃薯耀
Eos平台java公共逻辑Eos平台java公共逻辑
Eos平台java公共逻辑
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 2015年6月1日 17:20:4
- SpringMVC4零配置--Web上下文配置【MvcConfig】
hanqunfeng
springmvc4
与SpringSecurity的配置类似,spring同样为我们提供了一个实现类WebMvcConfigurationSupport和一个注解@EnableWebMvc以帮助我们减少bean的声明。
applicationContext-MvcConfig.xml
<!-- 启用注解,并定义组件查找规则 ,mvc层只负责扫描@Controller -->
<
- 解决ie和其他浏览器poi下载excel文件名乱码
jackyrong
Excel
使用poi,做传统的excel导出,然后想在浏览器中,让用户选择另存为,保存用户下载的xls文件,这个时候,可能的是在ie下出现乱码(ie,9,10,11),但在firefox,chrome下没乱码,
因此必须综合判断,编写一个工具类:
/**
*
* @Title: pro
- 挥洒泪水的青春
lampcy
编程生活程序员
2015年2月28日,我辞职了,离开了相处一年的触控,转过身--挥洒掉泪水,毅然来到了兄弟连,背负着许多的不解、质疑——”你一个零基础、脑子又不聪明的人,还敢跨行业,选择Unity3D?“,”真是不自量力••••••“,”真是初生牛犊不怕虎•••••“,••••••我只是淡淡一笑,拎着行李----坐上了通向挥洒泪水的青春之地——兄弟连!
这就是我青春的分割线,不后悔,只会去用泪水浇灌——已经来到
- 稳增长之中国股市两点意见-----严控做空,建立涨跌停版停牌重组机制
nannan408
对于股市,我们国家的监管还是有点拼的,但始终拼不过飞流直下的恐慌,为什么呢?
笔者首先支持股市的监管。对于股市越管越荡的现象,笔者认为首先是做空力量超过了股市自身的升力,并且对于跌停停牌重组的快速反应还没建立好,上市公司对于股价下跌没有很好的利好支撑。
我们来看美国和香港是怎么应对股灾的。美国是靠禁止重要股票做空,在
- 动态设置iframe高度(iframe高度自适应)
Rainbow702
JavaScriptiframecontentDocument高度自适应局部刷新
如果需要对画面中的部分区域作局部刷新,大家可能都会想到使用ajax。
但有些情况下,须使用在页面中嵌入一个iframe来作局部刷新。
对于使用iframe的情况,发现有一个问题,就是iframe中的页面的高度可能会很高,但是外面页面并不会被iframe内部页面给撑开,如下面的结构:
<div id="content">
<div id=&quo
- 用Rapael做图表
tntxia
rap
function drawReport(paper,attr,data){
var width = attr.width;
var height = attr.height;
var max = 0;
&nbs
- HTML5 bootstrap2网页兼容(支持IE10以下)
xiaoluode
html5bootstrap
<!DOCTYPE html>
<html>
<head lang="zh-CN">
<meta charset="UTF-8">
<meta http-equiv="X-UA-Compatible" content="IE=edge">