车辆跟踪及测距

车辆跟踪及测距是一种现代化的技术手段,通过使用各种传感器和技术设备,能够实现车辆的实时监控和测距。这些技术手段包括GPS全球定位系统、雷达、激光等,它们可以帮助我们更好地了解车辆的位置和行驶情况。在本文中,我们将从以下几个方面进行详细的探讨:
1. 车辆跟踪技术的发展历程
车辆跟踪技术在过去几十年中得到了极大的发展和进步。早期的车辆跟踪只是简单地通过人工观察和记录车辆的行驶轨迹。然而,随着计算机技术的发展,现代化的车辆跟踪技术不但可以实时查看车辆位置和行驶情况,还可以对车辆的行驶数据进行分析和处理。
2. 车辆跟踪技术的原理和应用
车辆跟踪技术主要基于全球定位系统(GPS)和移动通信技术实现。我们可以通过GPS系统定位车辆的位置,并通过移动通信技术将数据传输到远程控制中心。这些数据可以包括车辆的位置、速度、行驶路线等信息。车辆跟踪技术广泛应用于物流、货运、公共交通、执法等领域,并为车辆管理提供了重要的数据支持和智能决策。
3. 测距技术的原理和应用
测距技术是车辆跟踪的重要组成部分。常见的测距技术包括雷达、激光、红外线和声波等。雷达测距是一种广泛应用于军事和民用领域的测距技术,它可以通过发射和接收无线电波来确定目标物体的位置和距离。激光测距则是通过发射和接收激光束,实现精确测距。这些测距技术广泛应用于车辆防撞系统、自动驾驶等领域。
4. 车辆跟踪及测距技术的优缺点与挑战
车辆跟踪及测距技术的优点在于可以实时跟踪车辆位置和行驶情况,帮助车辆管理者更好地进行车辆调度和节约成本。而缺点则在于需要较高的技术成本和维护难度,同时也存在侵犯隐私的风险。此外,车辆跟踪及测距技术还需要应对日益复杂和多样化的车辆和行驶场景,面临着不断升级和优化的挑战。
总之,车辆跟踪及测距技术在现代交通和车辆管理中扮演着重要的角色。随着技术的发展和进步,我们相信这些技术将会不断创新和完善,为车辆管理和安全提供更好的保障和服务。
车辆跟踪及测距
- 该项目一个基于深度学习和目标跟踪算法的项目,主要用于实现视频中的目标检测和跟踪。
- 该项目使用了 YOLOv5目标检测算法和 DeepSORT
目标跟踪算法,以及一些辅助工具和库,可以帮助用户快速地在本地或者云端上实现视频目标检测和跟踪!
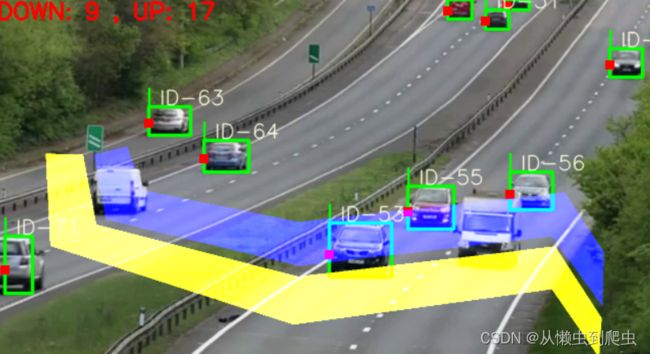
yolov5 deepsort 行人/车辆(检测 +计数+跟踪+测距+测速)
实现了局域的出/入 分别计数。
显示检测类别,ID数量。
默认是 南/北 方向检测,若要检测不同位置和方向,需要加以修改
可在 count_car/traffic.py 点击运行
默认检测类别:行人、自行车、小汽车、摩托车、公交车、卡车、船。
检测类别可在 objdetector.py 文件修改。
具体代码实现
YOLOv5 DeepSORT技术的应用将为智能交通管理、智能监控系统等领域带来更加智能、高效的解决方案,为人们的生活和工作提供更多便利与安全。随着技术的不断发展与完善,我们有理由相信,基于YOLOv5 DeepSORT的目标检测与跟踪技术将广泛应用于更多领域,并取得更大的突破与创新。
实现了局域的出/入 分别计数。
显示检测类别,ID数量。
默认是 南/北 方向检测,若要检测不同位置和方向,需要加以修改
可在 count_car/traffic.py 点击运行
默认检测类别:行人、自行车、小汽车、摩托车、公交车、卡车、船。
检测类别可在 objdetector.py 文件修改。
代码运行
$ git clone 追踪代码进入目录
$ cd unbox_yolov5_deepsort_counting激活虚拟环境
$ source venv/bin/activate升级pip
$ python -m pip install --upgrade pip安装pytorch
$ pip install torch==1.7.1+cu110 torchvision==0.8.2+cu110 torchaudio===0.7.2 -f https://download.pytorch.org/whl/torch_stable.html在 demo.py 文件中,设置要检测的视频文件路径,默认为 './video/test.mp4'
capture = cv2.VideoCapture(‘./video/test.mp4’)
运行程序
python count.pydemo代码
detector = Detector()
# 打开视频
capture = cv2.VideoCapture(VIDEO_PATH)
while True:
# 读取每帧图片
_, im = capture.read()
if im is None:
break
# 缩小尺寸
im = cv2.resize(im, (width//2, height//2))
list_bboxs = []
# 更新跟踪器
output_image_frame, list_bboxs = objtracker.update(detector, im)
# 输出图片
output_image_frame = cv2.add(output_image_frame, color_polygons_image)
if len(list_bboxs) > 0:
# ----------------------判断撞线----------------------
for item_bbox in list_bboxs:
x1, y1, x2, y2, _, track_id = item_bbox
# 撞线检测点,(x1,y1),y方向偏移比例 0.0~1.0
y1_offset = int(y1 + ((y2 - y1) * 0.6))
# 撞线的点
y = y1_offset
x = x1
if polygon_mask_blue_and_yellow[y, x] == 1:
# 如果撞 蓝polygon
if track_id not in list_overlapping_blue_polygon:
list_overlapping_blue_polygon.append(track_id)
# 判断 黄polygon list里是否有此 track_id
# 有此track_id,则认为是 UP (上行)方向
if track_id in list_overlapping_yellow_polygon:
# 上行+1
up_count += 1
print('up count:', up_count, ', up id:', list_overlapping_yellow_polygon)
# 删除 黄polygon list 中的此id
list_overlapping_yellow_polygon.remove(track_id)
elif polygon_mask_blue_and_yellow[y, x] == 2:
# 如果撞 黄polygon
if track_id not in list_overlapping_yellow_polygon:
list_overlapping_yellow_polygon.append(track_id)
# 判断 蓝polygon list 里是否有此 track_id
# 有此 track_id,则 认为是 DOWN(下行)方向
if track_id in list_overlapping_blue_polygon:
# 下行+1
down_count += 1
print('down count:', down_count, ', down id:', list_overlapping_blue_polygon)
# 删除 蓝polygon list 中的此id
list_overlapping_blue_polygon.remove(track_id)
# ----------------------清除无用id----------------------
list_overlapping_all = list_overlapping_yellow_polygon + list_overlapping_blue_polygon
for id1 in list_overlapping_all:
is_found = False
for _, _, _, _, _, bbox_id in list_bboxs:
if bbox_id == id1:
is_found = True
if not is_found:
# 如果没找到,删除id
if id1 in list_overlapping_yellow_polygon:
list_overlapping_yellow_polygon.remove(id1)
if id1 in list_overlapping_blue_polygon:
list_overlapping_blue_polygon.remove(id1)
list_overlapping_all.clear()
# 清空list
list_bboxs.clear()
else:
# 如果图像中没有任何的bbox,则清空list
list_overlapping_blue_polygon.clear()
list_overlapping_yellow_polygon.clear()
# 输出计数信息
text_draw = 'DOWN: ' + str(down_count) + \
' , UP: ' + str(up_count)
output_image_frame = cv2.putText(img=output_image_frame, text=text_draw,
org=draw_text_postion,
fontFace=font_draw_number,
fontScale=0.75, color=(0, 0, 255), thickness=2)
cv2.imshow('Counting Demo', output_image_frame)
cv2.waitKey(1)
capture.release()
cv2.destroyAllWindows()
结果展示
