对摄影术语(及其在光线追踪的应用)的简要概括
光线追踪精粹 || 翻译 @By WangYuHan
A BREALKNECK SUMMARY OF PHOTOHGRAPHIC TERMS (AND THEIR UTILITY TO RAY TRACING)
abstract:
对摄影和摄像的追求有许多里边多令人眼花缭乱的术语要记住。需要数月的练习和数千张照片才能直观地理解摄影师如何谈论他们的手艺。本章的目的是尽快地解释摄影和录像的术语-将他们归结为最基本的数学和效用-然后快速地介绍它们对光线追踪的意义,并选定几个术语给出可行的实现。
introduction:
(photography)摄影是一个爱好和职业,绝对充满了错误信息,这通常不会让人感到惊讶:摄影的基本方面深深植根于光学物理和电磁学。开始学摄影已经足够困难了-有那么多的术语和繁琐的细节-指望一个业余爱好者对本科物理学也有敏锐的理解简直是太苛求了。摄影师为简化这些概念而产生大量的信息,以及为简化这些简化而产生的信息,使这个问题更加复杂。对于任何人来说,如果对爱好的理解和基础科学有敏锐的理解,而不去挖掘学术文本,那将是个非常了不起的,如果你正在阅读这篇文章,那么假设你对摄影作为一种工艺以及摄影如何从基础数学和物理角度工作感兴趣,我还假设你对摄影中学习的概念感兴趣,并将它们用于光线追踪环境中,阅读本片文章,你会发现光线追踪相机在许多方面有不足,一个理想化的相机和真正的物理相机系统还有很多不足之处,也就是说,你会经常遇见需要在虚拟环境中模拟物理系统特性的情况,大的例子是景深,色差和滚动快门,如果你在摄影棚中工作,这种理解可能会让你与电影摄影师和摄影人员有更深入的对话,本章从基础只是开始,对摄影最常见的术语进行了简单而实用的总结。
摄影(Photography):通过捕捉光子来表达思想的爱好或职业。
相机(Camera):一种捕捉光子并将其切入到存储介质以便日后观察的设备。
数字传感器技术(DIGIAL SENSOR TECHNOLOGY)
光电探测器(PHOTODETECTOR)将光子转换成电流的无源电子元件。光电探测器通常具有非线性响应曲线。就像光敏二极管一样。
感光单元(PHOTOSITE) 一个单一的光电探测器。显示为一个像素。
传感器(SENSOR) 与笛卡尔坐标对齐的平面。该传感器负责对每个光电池的入射光子产生的电流进行采样和数字化。
传感器模块(SENSOR MODULE) 包含数字传感器和所有相关的光片的电气模块。
每个传感器模块都有独特的传递的函数,这可能取决于大量因素,通常不值得建立完整的模型,相反,如果需要模拟特定的传感器模块,通常最好直接对该传感器进行采样。关于数字传感器的采样,请参见A. Physlight. https://github.com/wetadigital/physlight。虚构的光谱灵敏度见图1-1.
像素间距(Pixel Pitch) :任意两个相邻像素中心之间的物理距离,通常以微米为单位。
红外/紫外滤光片(IR/UV FILTER): 放置在传感器前面的光学滤光片,用于吸收红外(IR)和紫外(UV)波长,不同产品的光电探测器的灵敏度差异很大,但是,大多数相机的光电探测器对人类视觉感知之外的波长很敏感。具体来说,他们可以短至300纳米(紫外),长至1200纳米(红外),红外/紫外滤光片允许传感器更接近人类的灵敏度。
红外和紫外线对你来说应该不是问题,除非你使用的是发射这些频率的设备。如果您试图模拟特定传感器的光电探测器,未能包括红外/紫外滤光片将产生不准确的、褪色的图像

黑白传感器模块 (BLACK AND WHITE SENSOR MODULE):带有红外/紫外滤光片的照片网格。每个感光点捕获所有入射的波长大约在400 nm到700 nm之间的光子。传感器为每个像素输出单个数值,该数值表示捕获周期内所有光子的积分,黑白传感器只捕获亮度数据,而没有能力捕捉色度数据,如图1-1所示是一个虚构的传感器模块,它具有红外/紫http://外切割滤波器和最终的光谱灵敏度。
彩色传感器 (COLOR SENSOR) 黑白传感器外加一个彩色玻璃镶嵌而成的滤光片。该镶嵌具有一个重复的图案,该图案为每个单独的像素指定一个彩色光学滤镜。这彩色玻璃通常是红色,绿色,蓝色或透明的,红色滤波器将近似人体的长锥,绿色滤波器将近似人体的中锥,蓝色滤波器将近似人体的短锥。用比色法LMS系统表示,我们可以通过将RGB转换到XYZ来粗略地近似任何给定的马赛克图案的色度和亮度能量的退化。

贝尔图形(BAYER PATTERN)BAYER PATTERN在颜色传感器[1]中发现的最常见的马赛克图案。其他型号确实存在并正在使用,请参见Sony[10]、Fujiflm[4]和Buettner[2]。一种2 × 2的重复图案,由两个绿色的折页、一个红色的折页和一个蓝色的折页组成
两条绿色的传单沿着一条对角线,红色和蓝色的传单沿着另一条对角线。拜耳耳罩的镶嵌如图1-2所示,以及其他值得注意的镶嵌图案。拜耳滤光器捕获大约45%的亮度数据和29%的色度数据。Bayer flter的信息捕获大致近似如下:

去马赛克(DEMOSAICING)对每个像素近似全RGB颜色信号处理算法。这将是不同于马赛克图案的。在去马赛克之前,传感器中的每个像素只有一个颜色或亮度值。完整的RGB显示需要每个像素三个数据点
如果是在原始记录上合成,了解特定的去马赛克算法是必要的。
FOVEON传感器 (FOVEON SENSOR)一种由三个垂直堆叠的光电二极管组成的传感器,这种半导体元件无需镶嵌图案。
每个光电池由3个光电二极管组成,分别负责红色、绿色和蓝色波长。每个光电管读取一个完整的RGB三元组,允许完整的RGB图像,而不需要马赛克。Foveon传感器的发明被记录在The Silicon Eye[5]。
一种有用的思维模式是将光线追踪摄像机视为类似于Foveon传感器.
混叠 (ALIASING) 混叠导致采样信号与原始信号不同的失真或伪影。这在有高频数据的图像中很常见。织物是发现照片中混叠的好地方。
混叠在带有马赛克的传感器模块中尤其成问题,因为相邻的光电池可以有不同的flters并捕获不同的信息。在拜耳模式中,这可能导致高频噪声,其中绿色和红色信息交替(或绿色和蓝色交替)
这与光线追踪中看到的混叠类型相同。由于马赛克混叠在物理捕获往往更分散.
抗混叠滤波器 (ANTIALIASING FILTER)在传感器前放置的一种光学滤光片,以减少图像中混叠伪影的存在。它是一种有效的光学模糊元素,减少了到达传感器的高频信息。特别注意的是去除云纹,因为它是最分散混叠的工件。
云纹(MOIRE)当两种图案不完全重叠时出现的一种分散注意力的视觉伪影。高频细节图案重叠,形成视觉上醒目的低频图案。
胶片
胶片 (FILM)一种物理捕获和存储介质,通常是在塑料基板上的一层感光的化学物质夹层。胶片放置在相机的后部,用来捕捉入射的光子。根据相机类型的不同,胶片托架可以一次装入一个,也可以在水平或垂直方向缠绕穿过相机。
底片(FILM NEAHATIVE)一种用于胶片的存储介质,也是从相机中获取的原始图像。对于底片来说,增加光子会使图象变暗。底片的输出将会有倒转的亮度和色度数据。
正片(反转胶片) 具有正片特性的胶片。胶片的输出不具有倒转的亮度和色度数据。
NEGATIVE 通俗地指捕捉设备的任何即时输出。
35MM胶片卷筒宽度为35毫米的胶片。这是二十世纪大部分时间里最常用的电影。
8MM胶片卷筒宽度为8MM的胶片 还有16MM, 70MM。
65MM胶片卷筒宽度为70毫米的胶片。由于历史原因,70毫米胶片有时也被称为65毫米胶片。请注意,“65mm”薄膜的感光区域在任何尺寸上都不是65mm。
通用捕捉维度
屏幕高宽比(ASPECT RATIO)感光区域的水平尺寸与垂直尺寸之比,以X: Y格式表示。对于胶片来说,这是感光区域物理尺寸的比率。对于数字传感器,这是水平像素计数与垂直像素计数的比率。
35MM胶片(35MM PHOTOGRAPHIC FILM)在二十世纪摄影应用中最常见的胶片。胶片水平穿过相机,这样胶片就可以通过相机顶部和底部的穿孔展开。35mm感光胶片有一个垂直分辨率为24毫米的感光区域。这是由于光敏区上方和下方的穿孔所占据的空间。
35mm摄影FLM的水平分辨率为36毫米。最终获得36mm × 24mm的完全分辨率和3:2的长宽比。
35毫米电影胶片(35MM MOVIE FILM)电影胶片在二十世纪的电影制作中最常见。胶片垂直穿过相机,这样胶片就可以用相机侧面的穿孔展开。有一个音频带,存储捕获的音频,位于穿孔和底片一端的光敏区域之间。35MM电影胶片其水平分辨率为22毫米,垂直分辨率为16毫米,因此其完全分辨率为22毫米× 16毫米,长宽比为1.375:1。
当创建一个光线追踪传感器设计来模拟一个真实的胶片相机,不要只使用胶片的宽度作为你的虚拟传感器的宽度,也就是说,不要只设置你的宽度为8毫米,16毫米,35毫米,或70毫米。真正的光敏区域从来不是全宽度的,因为可能会有音频带或穿孔
35MM传感器(FULL FRAME)一种带有感光区域的数字传感器,用来模拟35MM摄影胶片。它具有任意像素分辨率,传感器尺寸为36毫米× 24毫米,纵横比为3:2
裁剪传感器(APS-C):一种具有光敏区域的数字传感器,其面积约为35mm摄影胶片的一半。它具有任意像素分辨率,传感器尺寸约为23.4 mm × 15.6 mm,纵横比为3:2。
FOUR THIRDS SENSOR 一种数字传感器,其光敏区域约为35mm摄影胶片面积的四分之一。它具有任意像素分辨率,传感器尺寸约为17.3 mm × 13 mm,纵横比为4:3。四分之三的名字并不是来自于纵横比,而是指相关的阴极射线管的尺寸。
SUPER 35MM SENSOR一种具有光敏区域的数字传感器,模拟35MM薄膜。它具有任意像素分辨率,传感器尺寸为24.89 mm × 18.66 mm,长宽比为1.33:1。
MEDIUM FORMAT(MEDIUM FORMAT)使用大于35mm摄影胶片但小于大画幅(摄影)的感光区域(胶片或传感器)拍摄的照片。这意味着中等版式的感光区域在36毫米× 24毫米和130毫米× 100毫米之间。介质格式也可以是任意纵横比的。
LARGE FORMAT (PHOTOGRAPHY) 用130毫米× 100毫米或更大的感光区域(胶片或传感器)拍摄的照片
LARGE FORMAT (VIDEOGRAPHY)使用比Super 35mm传感器更大的感光区域拍摄的视频。
通用的捕捉设备分辨率
2K 像素分辨率为2048 * 1080
4K 像素分辨率为4096 * 2160
DCI 8K 像素分辨率为 8192 * 4320
高清晰度 1920 *1080
UHD 3840 * 2160
8K 7680 * 4320
透镜
透镜:一种数学运算,使入射的平行线弯曲,使它们收敛于一个中心点。透镜在图1-3简单的薄透镜模型
薄透镜模型经常用于光线跟踪相机,可以满足您的大多数视觉需求
焦点平行线弯曲的唯一中心点。

摄影透镜:由光学元件组成的物理外壳,它将入射的光子透镜到光敏区域前面的焦点上。一个功能性摄影镜头如图1-4所示。
视场焦点在镜头前可见的集合的数量。这是用一个立体角来表示的,对于每个维度通常用角度或弧度来测量。
水平视野:构成焦点可见的集合最宽视野的角度,以弧度或度为单位
垂直视场:以弧度或度为单位的角度,构成焦点所能看到的最高的宇宙景象
针孔相机 一种黑体盒子,在一边有一个小孔,在另一边有一个感光区域。这个小孔被称为光圈,是针孔相机的焦点。理想的针孔相机有最小的散焦模糊,但只允许极少的光子进入。
焦距:焦点到入射平行线与辐合线相交平面的距离。这是镜头的物理属性,相机对它没有影响。焦距如图1-3和1-4所示。视场的水平和垂直尺寸可以从焦距计算(反之亦然)

光圈/虹膜:相机和镜头上的一个开口,(理想情况下)是光敏区域的唯一光子来源。可互换透镜的光圈大小通常是可变的,其半径可以扩大或缩小。半径的增加会让更多的光子进入,但也会增加混乱圈的大小。半径的减小会使进入的光子变少,但会减小混乱圈的大小。“光圈”这个词在摄影中常用,而“虹膜”这个词更常用在视频摄影中,但它们都代表同一件事。
散光圈 由相邻场景特征发出的光子锥的卷积引起的光学模糊。这些光子锥的半径与孔径/虹膜成正比。
焦平面:与透镜的纵轴(前轴)正交的理想平面。与焦点平面相交的任何物体或特征都以该透镜可能的最大细节投影到传感器平面上。
散焦模糊: 任何不相交于焦平面的物体,由于混乱的圆圈而造成的模糊。
景深:两个平面之间的距离,一个近一个远,其中所有物体都显得清晰或聚焦。所有的物体和特征,没有完美地相交的焦点平面将经历离焦模糊。粗略地说,只有当混淆圈小于传感器的像素间距时,特征才会显得尖锐。光场深度有时可以通俗地用来指离焦模糊。这是错误的。不要这样做。
入射光瞳:光圈从镜头前面看光圈的外观入口瞳孔的直径不是孔径的直径。入口瞳孔可以被认为是光子入射到前透镜元件所“看到”的光圈。
APERTURE NUMBER 孔径数焦距与瞳孔直径之比。也叫f数,它是透镜的一种物理性质。
请注意,随着孔径宽度的减小,孔径数会增加(因为入口瞳孔与孔径宽度相关)。f数不要与f混淆,f表示图中的焦距
TRANSMITTANCE 透镜的透射效率。如果100%入射到透镜正面的光子被传输到透镜背面,透镜的透射率为1.0。透镜中连续的玻璃层会导致一些光子被透镜壁吸收或反射回场景中。透射率在0.7到0.9之间的透镜很常见。
通过透镜的透光率改变透镜的f光圈。透镜的t形光圈的计算公式为

其中f止是一个数值(例如,1.4,2.0,2.8)。以透射率为0.7的f2.0透镜和透射率为的f2.4透镜为例1.0版本将有类似数量的光子传输到传感器
快门
快门速度感光区域对光子敏感的持续时间。
帧率每秒钟为一段视频捕获的摄影帧数。普通的帧率是每秒24帧。 NTSC国家的电影每秒23.976(24/1.001)帧,NTSC国家的电视每秒30帧和29.97(30/1.001)帧,美国的电影和电视每秒25帧
朋友的国家。帧率必须低于快门速度的倒数。
快门角光敏区域对按帧率倒数归一化的光子敏感的持续时间。快门速度为0是0度。快门速度为1 /帧是360度:

电影中常见的一个例子是20毫秒每秒24帧的快门时间,快门角度为172.8度。
180度法则 当快门角度为180度时,视频作品中流畅逼真的动态模糊效果被认为是最强的。对于每秒拍摄24帧的胶片,快门速度将设置为1/48秒,也就是21毫秒。
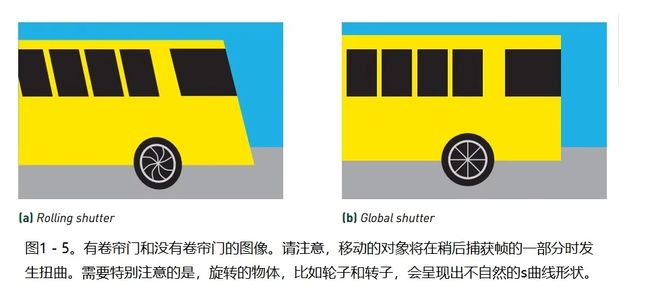
全局快门 所有像素值同时采样。全球快门没有卷帘。全局快门如图1-5b所示。
曝光
曝光一幅图像中捕获的光量的量化。焦平面上的曝光完全由:

式中L为场景亮度,t为快门时间,U为到焦平面的距离,f为镜头的焦距,A为镜头的f数,t为镜头的透过率,C为相机票价修正系数,h为渐晕系数,θ为像点与镜头纵轴的夹角。数学是由ISO 12232[6]浓缩而成的。
ISO/GAIN 数字amplifcation。这是一种过分简化。建议您与您的资产创造者谈谈,他们是如何最放心地指定资产敞口的。最常见的标准是(1)ISO,(2)曝光值(EV),(3)分贝,或(4)f-stop。数字传感器的ISO完全按照ISO 12232[6]定义。ISO这个术语是
通常在摄影中使用,而增益这个术语在视频摄影中更常用,但它们都代表同一件事。尽管ISO是一个缩略语(指国际标准组织),但它在希腊语前缀中发音为“ISO”,意思是“平等”。
CLIPPING 超过这个亮度,感光区域就无法分辨曝光的差异。数字传感器会对高光进行剪辑,因此有一个最大亮度,超过这个亮度,任何额外的光都只会被读取为剪辑值。底片在阴影中剪辑,所以有一个最小亮度,低于这个亮度的任何光线的减少都将被读取为剪辑值。
NOISE FLOOR 对数字传感器来说,信噪比低于某个值(该值通常为2:1或1:11)的曝光值。捕获图像的主要噪声来源是光子shot噪声、暗电流噪声、图像传感器的模拟处理读出噪声和A/D(模拟-数字)转换器的量化噪声。数码相机的噪声特性在ISO 15739[7]中有定义。
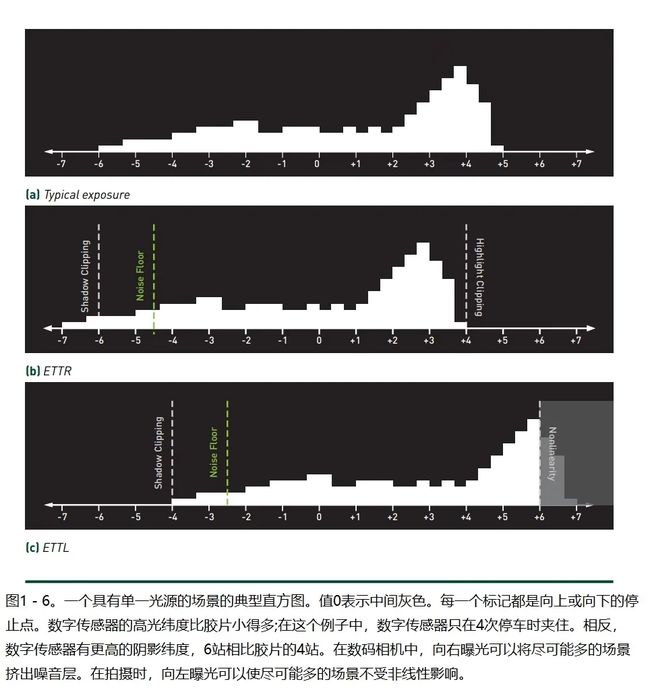
动态范围 对于数字传感器来说,剪切时的亮度与传感器噪声底亮度之比。动态范围与ETTR和ETTR一起在图1-6中被描述。
EXPOSURE TO THE RIGHT (ETTR) 用数字传感器拍摄的照片应该设置为最高曝光而不剪高光。这样可以最大化阴影和亮点的细节。如果直方图是一个左右轴,阴影在左边,高光在右边,数码摄影师被鼓励把他们的曝光推到右边。
EXPOSURE TO THE LEFT (ETTL) 使用负片拍摄的照片应该设置为最低曝光而不剪切阴影。这样可以最大化阴影和亮点的细节。如果直方图是一个左右轴,阴影在左边,高光在右边,那么鼓励胶片摄影师将曝光推到左边。
WHITE BALANCE 白色的颜色表示。场景中的相机和灯光都将有特定的白平衡。这些可以通过色温以及各种色调和/或饱和度调整来调节。
LOG RECORDING 通过将亮度从线性曲线移动到对数曲线来增加视频记录的动态范围。对于8位或10位的摄像机,噪声的主要来源是来自A/D转换器的量化噪声。用对数曲线压缩亮度曲线以适应减小的比特数,有助于减少量化误差。视频可以在编辑中反转,以捕获最大的动态范围。由于突出部分中的压缩信息,日志记录可能会使向右公开变得复杂。图1-7显示了日志记录的动态范围提升效果

RAW RECORDING 一种特殊类型的视频捕获,使额外的修改在编辑。原始捕获的具体内容取决于相机制造商和原始协议。原始捕获可能支持调整ISO或white balance的编辑,可能已经demosaiced,可能是压缩,或可能是压缩有损压缩。
1.9 等效性
BLOCKING 物体和人在图像中的位置。图像的外观和感觉可以通过改变主题的位置和其他对比元素在框架内进行微调
35mm 等效性 35MM EQUIVALENT 一个标准化的框架,摄影师可以通过它来推理他们的相机或镜头。可以用为35mm摄影传感器设计的类似镜头来描述为没有35mm摄影传感器的相机设计的镜头。通过这种方式,摄影师可以推断出一个镜头的视场和视场深度,前提是他们已经记住了35mm摄影传感器的镜头的这些特性。这就不需要记住所有传感器尺寸的场和场的深度,因为它们可以快速地为任何传感器尺寸计算
crop因子用来比较不同感光区域大小的相机的光度质量的工具。crop因子可以是:
1胶片/传感器宽度与35mm摄影胶片宽度之比:
crop factor = width / 36mm
2胶片/传感器对角线与35mm摄影胶片对角线之比:
crop factor = diagonal / 43mm

35MM等效焦距透镜的物理焦距乘以光敏区域的作物系数。35mm等效焦距和35mm等效场深如图1-8所示
35MM等效曝光镜头的曝光不随作物系数而变化。相机的灵敏度和噪声可能会随着裁剪系数的变化而变化(由于光敏区域的大小),但是两台不同的相机设置相同的ISO/增益值将会捕捉到相同的场景和相似的曝光值。
35mm等效景深 镜头的光场深度不随裁切系数而变化。然而,如果摄影师试图在两个传感器大小不同的相机上捕捉相同的块,菲尔德深度将是“真实”菲尔德深度乘以传感器的裁剪因子。光场的深度只会根据光圈的f值(而不是等效的35mm光圈)和到拍摄对象的距离而变化。然而,相机的裁剪因子将改变该相机镜头的视场。对于较小的传感器,具有正的作物因子,35mm等效焦距将大于真正的焦距,这意味着视场将更窄。在镜头中保持同样的遮挡需要让你的拍摄对象向后移动。这反过来将增加feld的深度。因此,保持一致的阻塞将改变由作物因子的feld深度。35mm等效场深和35mm等效焦距如图1-8所示
35毫米等效孔径 一个有用但有误导性的术语,用来表示透镜的f光阑乘以光敏区域的截距因子。光圈的f-光圈表示两件事:光圈深度和曝光量。镜头通常被称为35mm等效光圈,但这可能有点误导。例如,一个作物传感器上的f1.8可能据说有一个f2.7 35毫米当量,由于1.5倍的作物因子。但这是误导,因为菲尔德的深度将增加作物因子(如果保持封盖),但曝光不会改变。因此,在镜头传感器上的f1.8将具有相当于f2.7镜头的feld深度(如果保持镜头遮挡),但将具有相当于f1.8镜头的曝光。
1.10 物理棱镜
PRIME LENS 固定焦距透镜一种被设计和推销为具有固定焦距的透镜。
ZOOM LENS一种被设计和推广为具有可控焦距的镜头。
ULTRA-WIDE ANGLE LENS 超广角镜头一种35mm等效焦距小于24mm的镜头。
WIDE ANGLE LENS 广角镜头一种具有35mm等效焦距的镜头在24mm和35mm之间。
STANDARD LENS 一个具有35mm等效焦距的镜头在35mm和60mm之间。
TELEPHOTO LENS 长焦镜头一种具有35mm等效焦距的镜头60mm和200mm之间。
SUPER TELEPHOTO LENS 超长焦镜头一种35mm等效焦距大于200mm的镜头。
MINIMUM FOCUSING DISTANCE 最小聚焦距离透镜可以聚焦的距离传感器平面最近的距离,或者从传感器平面到最近的聚焦平面的距离。
MACRO LENS微距透镜一种被设计和推广为最小聚焦距离的透镜。微距透镜用它们在最小聚焦距离下的放大比来描述。具有1:1放大倍率的微距镜头将完美比例的物体投射到传感器上;例如,一个放大倍数为1:1的微距镜头将一个20毫米宽的物体以20毫米投影的形式投射到传感器平面上。
LENS COVERAGE 镜头覆盖:镜头投射到传感器平面上的图像圆的直径。图像圆外的区域保证是小插图,可能是完全黑色的,图像圆内的区域是投影图像。一个43毫米覆盖的镜头将用一个完整的投影覆盖一个全画幅摄影传感器。一个29毫米覆盖的镜头将覆盖一个完全投影的裁剪传感器,但将不能覆盖一个35毫米摄影传感器,这样将有严重的渐晕导致在外围完全黑。通常不希望使用不覆盖传感器尺寸的镜头。
背景虚化
BOKEH 虚化 图像失焦区域的美学质量,发音为“bo-kay”,在日语中是模糊的意思。散景通常用于描述聚焦平面外的点光源的外观,技术上描述聚焦平面外的所有特征的外观。散景可以描述困惑圆的形状,其中“圆”实际上可能是N-gon或猫的眼睛。散景还描述了场景中任何相邻特征的混淆圆圈将如何在投影到图像传感器上后结合起来。透镜散焦的柔软度是由混乱圈中的光分布来保护的。散景的三种软度如图1-9所示。

CORRECTED BOKEH 校正后的散景光在消费型透镜中最常见的散景光类型,用于混淆圈的光子均匀分布在整个混淆圈中。点光源看起来像厚厚的光盘。
OVER-CORRECTED BOKEH OVER-CORRECTED BOKEH主要来自圆的边缘。点光源以肥皂泡的形式出现,通俗地称为肥皂泡散景。不聚焦的区域被认为是相当分散注意力的。如今,矫枉过正的散景更被视为一种审美选择,而不是严格意义上的可取之处。很多旧镜头都显示出过度校正的散景,在你的镜头中呈现过度校正的散景是假装某个场景是在过去拍摄的有效手段
UNDER-CORRECTED BOKEH UNDER-CORRECTED BOKEH主要来自圆的中心。它通常被描述为拥有 “扩散”质量。失焦区域缺乏鲜明的特征或对比,并加强了图像的焦内和失焦区域之间的分离。
N-BLADE APERTURE (WHERE N IS A NUMBER) N- blade孔径(这里N是一个数字)大多数透镜的可变孔径是通过旋转N组凹叶片使其更靠近透镜中心(缩小孔径)或更靠近透镜壁来改变其直径的
(扩大孔径)。这可能会导致相机的失焦区域出现n -gon而不是完美的圆。
CAT’S-EYE BOKEH 图像中的失焦区域呈现出猫眼的形状,而不是圆形。猫眼散景主要来自于二不同的效果。对于具有非球面元素的透镜,图像边缘的散景可以横向压缩,产生出现椭圆的失焦区域。猫眼的另一种主要形式出现了
当一个特征的混淆圈部分落在入口瞳孔或出口瞳孔之外时。散景不是一个完美的圆,而是两个圆的交点,这是由于一些光线落在瞳孔外面,导致了两个圆的重叠投影。与两个圆的交点有关的形状实际上被称为透镜。
有一个非常简单的方法来控制虚拟场景的散景质量。当为一个薄透镜模型选择一个初始的随机射线方向时,而不是从单位圆盘上随机采样,而是从散景纹理中随机采样。这只是一个二维灰度图,它代表了孔径的形状和概率。一个完美校正的散景盘只是一个黑色背景下的灰色圆圈。一个过度校正的散景会是一个灰色的圆,它的边缘逐渐向最大的白色靠拢,而一个未校正的散景会是一个灰色的圆,它的边缘逐渐向黑色靠拢。这也可以用来模拟形状,如常见的N-gon和猫眼,或者可以用于更奇特的形状,如星星和螺旋。
1.12 各种棱镜的缺陷
FOCUS BREATHING:当透镜改变焦距时,焦距也会改变的一种不希望出现的效果。对于许多镜头来说,聚焦在靠近相机的地方会增加焦距(放大),而聚焦在远离相机的地方会减少焦距(缩小)。
PARFOCAL 当用户改变焦距时,近焦透镜将保持相同的焦距平面。这在录像工作中是可取的,因为摄像师可以放大他们的主题,并保持敏锐的焦点。
VARIFOCAL 变焦透镜会随着使用者改变焦距而改变焦距平面。这在录像工作中是不可取的。
VIGNETTING 从图像中心到图像边缘的曝光下降。这是由于被机械元件堵塞或被任何单独的光学元件不完全覆盖而导致在图像框架上捕获的光子下降造成的。
渐晕可以通过选择角度(从纵轴)或半径(从图像中心)渐晕开始,角度或半径渐晕结束,渐晕结束时的黑暗,以及两个极端之间的插值函数来简单地建模为后处理效果。对于更复杂的渐晕图案,可以使用两个以上的锚点。同样的技术也可以用来抵消物理透镜系统上的渐晕,以产生整个图像的均匀曝光,但请注意,你将有一个增加的噪声底部的图像被提高。
RECITILINEAR LENS 在环境中投射直线的镜头,在传感器平面上投射直线。see Figure 1-10a
CURVILINEAR LENS 曲线透镜将环境中的直线投射为传感器平面上的曲线。
BARREL DISTORTION 筒形畸变曲线透镜在环境中投射直线的畸变,即从图像中心向外弯曲的曲线。(参见图1-10b。)
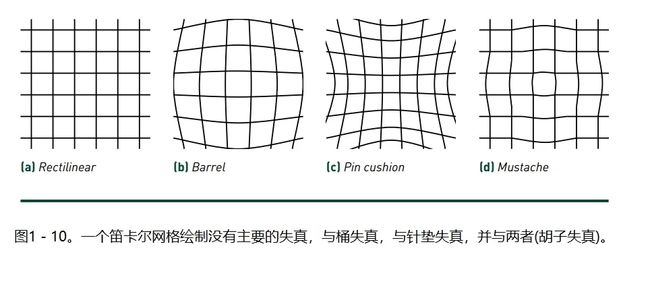
PIN CUSHION DISTORTION PIN缓冲畸变曲线透镜在环境中投射直线的畸变是向图像中心弯曲的曲线。(参见图1-10c。)
MUSTACHE DISTORTION 在环境中,曲线透镜投射出直线,呈现出桶形和针形缓冲变形的曲线,形成波浪状的曲线,让人联想到胡子。(参见图1-10d。)
FISHEYE LENS 鱼眼镜头一种试图捕捉镜头前的整个半球的镜头。当鱼眼镜头将一个半球映射到一个平面上时,会有明显的桶形变形。
FLARING 眩光由于明亮的光源入射到镜头上而在捕获的图像中形成的一团光。光点不是只在光线投射的位置被捕捉到,而是会从镜头内的玻璃元件或镜头壁上反射回来,并在捕捉到的图像的某个地方产生一个可见的明亮涂片。光源不需要在透镜投影内,它的光子只需要入射到透镜上。这可能是图像对比度下降的一个原因。
许多类型的透镜都表现出独特而有趣的特性。通过识别曝光率高的地方并生成你想要的票价形状,这可以作为最终图像的后期处理,成本很低。这种方法的一个大问题是,它不能捕捉到那些明亮曝光点的入射角,因为透镜的飞行特性最好的特征是它们对不同角度的准直光束的响应。
SPHERICAL ABERRATION 球面像差球面光学元件造成的不完美透镜。入射的平行线不能正确地汇聚到一个点上,在捕捉到的图像中它显得很柔软。
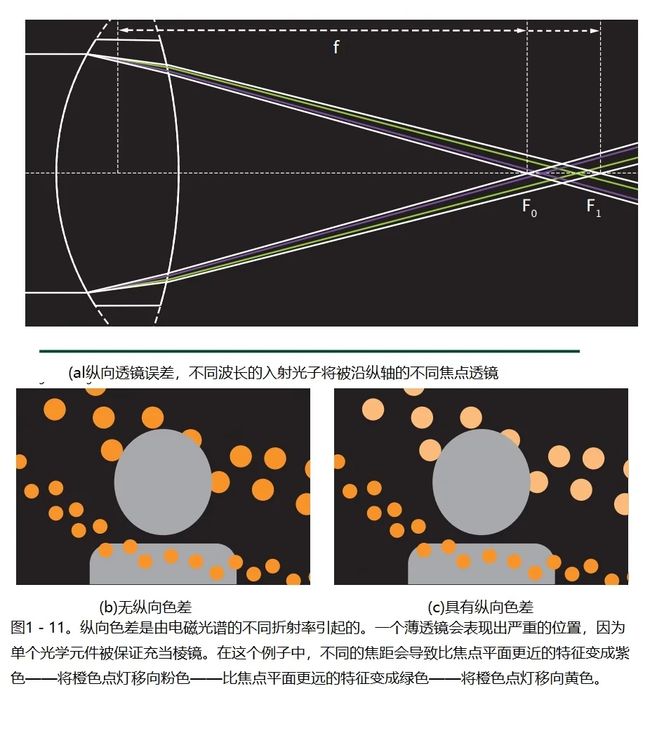
LONGITUDINAL CHROMATIC ABERRATION 纵向色差使不同波长的光具有不同焦距的不完全透镜,通俗地称为焦斑。不同波长的焦点沿透镜的纵轴变化。这可能会导致不直接落在焦点平面上的物体的色度偏移。透镜及其对图像的影响的一个例子可以在图1-11中看到。
TRANSVERSE SHROMATIC ABERRATION (COLOR FRINGING) 横向色差(条纹)不完美引起色度或流光(称为条纹)渐变的透镜边缘反差大,又称横向色差。从一个斜的角度射到正面的所有光的波长都会聚在焦点的平面上,但每个波长都会聚以与焦点不同的半径收敛。斜线的焦点将随波长而横向(沿平面)变化。横向彩色像差如图1-12所示。

FIELD CURVATURE 场曲率焦点“平面”的形状和方向。在物理透镜中,聚焦平面永远不会真正垂直于透镜的纵轴,它也永远不会是一个真的平面,而是一个曲面。这可以通过改变被模拟的光学元件的方式来模拟建模。通过旋转薄透镜模型,可以旋转聚焦平面单位圆盘离透镜的纵轴。聚焦平面可以通过将薄透镜模型的单位圆盘映射到曲面上而弯曲
DIFFRACTION 衍射导致物理捕获图像清晰度降低的一种不良效应。衍射在摄影中几乎总是指在高f数(小光圈)时清晰度的降低,在那里波衍射的影响可以产生比像素间距更大的干涉。
光学元件
光学元件:透镜装置的单个部分,通常由玻璃制成,具有固定的形状和大小
球面元件一种光学元件,它的边是圆的,或者是球形曲线。
ANAMORPHIC ELEMENT 一种有一面或两面为圆柱形的光学元件。
非球面元件 一种围绕纵轴旋转对称的光学元件,但它的一面或两面不是圆的、球形的或圆柱形的。
球面透镜 只包含球面元素的透镜。
非球面透镜 只包含球面和非球面元素的透镜。广角和超广角镜头经常使用非球面元件来优化宽视场。
涂层 涂覆在光学元件上以达到一定光学质量的涂层。涂层的应用是由于诸如改变入射折射率或改变被吸收的波长等技术原因。
涂料的应用可以出于美观的原因,如控制对比度、锐度或清晰度。
失真
变形透镜含有一个或多个变形元素的透镜变形透镜是由其挤压比定义的,通常在1.3:1和2:1之间。变形镜头会在图像捕捉过程中挤压水平尺寸,在后期制作中需要对图像进行去挤压。一个50mm焦距的2:1变形镜头将保持50mm镜头的垂直视场,但将有25mm镜头的水平视场。圆柱形元素偶尔会在图像中产生水平方向。变形的镜片会有椭圆焦。他们就是好莱坞的代名词
摄像机运动
摄像机绕垂直轴的旋转。
TILT相机绕水平轴的旋转。
摄像机绕前轴的旋转。
摄像机沿水平轴的平移。
DOLLY相机沿其前轴的平移。
摄像机沿垂直轴的平移。
跟踪相机沿着任意平面的平移,通常跟随一个主题。
Reference:
[1] Bayer, B. E. Color imaging array. Patent (US3971065A). 1976.
[2] Buettner, C. Image processing method and flter array. Patent (US20190306472A1). 2019.
[3] CIE. Commission Internationale de l’Eclairage Proceedings. Cambridge University Press,1931.
[4] Fujiflm. Fujiflm X-Trans sensor technology.https://www.fujifilm.eu/uk/products/digital-cameras/model/x-pro1/features-4483/apsc-16m-x-trans-cmos, 2017.
[5] Gilder, G. The Silicon Eye: How a Silicon Valley Company Aims to Make All CurrentComputers, Cameras and Cell Phones Obsolete. W. W. Norton & Company, 2005
[6] ISO. 12232:2019: Photography—Digital still cameras—Determination of exposure index,ISO speed ratings, standard output sensitivity, and recommended exposure index.https://www.iso.org/standard/73758.html, 2019.
[7] ISO. 15739:2017: Photography—Electronic still picture imaging—Noise measurements.https://www.iso.org/standard/72361.html, 2017.
[8] Langlands, A. Physlight. https://github.com/wetadigital/physlight, 2020.
[9] Schanda, J. Colorimetry: Understanding the CIE System. John Wiley & Sons, Inc., 2007.
[10] Sony. Sony releases stacked CMOS image sensor for smartphones with industry’shighest 48 effective megapixels. Sony Global,https://www.sony.com/en/SonyInfo/News/Press/201807/18-060E/, July 23, 2018.