Halcon阈值处理的几种分割方法threshold/auto_threshold/binary_threshold/dyn_threshold
Halcon阈值处理的几种分割方法
文章目录
- Halcon阈值处理的几种分割方法
-
- 1. 全局阈值
- 2. 基于直方图的自动阈值分割方法
- 3. 自动全局阈值分割方法
- 4. 局部阈值分割方法
- 5. var_threshold算子
- 6 . char_threshold 算子
- 7. dual_threshold算子
在场景中选择物体或特征是图像测量或识别的重要基础,而阈值处理是最简单也最常用的区域
选择方法,特别适用于目标和背景的灰度有明显区别的情况。下面就介绍几种常用的阈值处理方法。
1. 全局阈值
首先来看什么是阈值。简单来说,闽值就是一个指定的像素灰度值的范围。假设阈值为0~255灰度值,阈值处理就是将图像中的像素灰度值与该阈值进行比较,落在该范围内的像素称为前景,其余的像素称为背景。一般会用黑白两色来表示前景与背景。这样图像就变成了只有黑与白两种颜色的二值图像。
当检测对象的图像灰度与背景差异比较大时,用阈值处理可以很方便地将其与背景分离开来。根据像素与相邻像素之间的灰度值差异设置一个阈值,可以将像素与其相邻像素分隔开来。如果是在图像边缘,可以利用边缘的灰度差值进行简单的阈值处理,有助于沿边界分割图像。在Halcon中,可使用threshold算子进行全局阈值处理。举例如下:
read_image (Image,'data/codes')
rgbl_to_gray (Image, GrayImage)
threshold (GrayImage, DarkArea, 0,128)
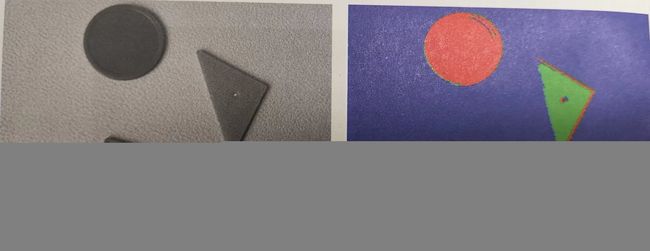
该程序的阈值处理结果如图所示,其中图(a)为输入图像,图(b)中的红色区域为阅值处理后提取出的较暗区域。

在上面的例子中,threshold 算子的第1个参数Graylmage 为输入图像,这里用的是灰度图;第2个参数DarkArea 为输出的区域,类型为Region;第3个和第4个参数为阀值的区间值,表示0~128 灰度范围内的像素区域。
2. 基于直方图的自动阈值分割方法
有时手动设定阈值并不是一个严谨的方法,因为人对图像灰度的感受并不精准,即使对同一场景,当光线有微妙变化时,灰度也会有差异。手动设定阈值在粗估计时可能是一个便捷的方法,但是随着后续计算步骤的叠加,将带来不可估量的误差。在连续采集的图像中,图像的灰度也是动态变化的,环境光照、拍摄角度等因素都会影响图像的灰度。如果阈值是一个固定的值,那么在处理连续图像时结果会不够准确。因此,可以使用自适应阙值进行调节。
自适应阈值是一种基于直方图的阈值。直方图是图像像素落在0~253这个区间内的数量统计图。通过直方图可以看出图像灰度的大致分布,在有些情况下甚至可以估+检测对象的面积与结构。
在Halcon 中使用auto_threshold算子进行自适应阈值处理。该算子可以对单通道图像进行多重闽值处理,其原理是,以灰度直方图中出现的谷底为分割点,对灰度直方图的波峰进行分割。因此,有多少个波峰,就会分割出多少个区域。auto_threshold 算子的第3个参数Sigma(此例中为8.0)是一个平滑算子,可以对直方图进行平滑处理。举例如下:
read_image (Image,'data/shapes')
rgbl_to_gray (Image, GrayImage)
auto_threshold(GrayImage,Regions,8.0)
该程序的阈值处理结果如图所示,其中图(a)为灰度图像,包括几种不同灰度的对象.图(b)用3种不同的颜色区分了自动阈值分割出的3个区域。其中圆形与矩形物体因为灰度值相近被分割为同一区域;三角形的灰度值与另外两种有差异,被分割为单独的区域;背景灰度值最大,也被分割为一个单独的区域。
auto_threshold算子的前两个参数分别为输入的Image图像和输出的Region类型的区域。第3个参数 Sigma 为对灰度直方图进行高斯平滑的核的大小。高斯卷积运算,其计算原理是,先确定图像的绝对灰度直方图,然后使用高斯滤波器对该直方图进行平滑处理。在本例中,设Sigma 值为8.0,对灰度直方图的平滑效果如图所示。
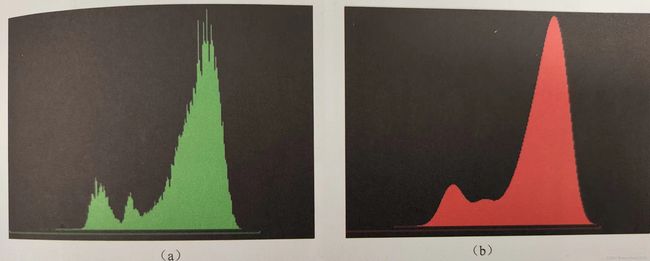
图 (a)为原始灰度直方图,可以看出波峰比较多,如不处理将产生大量的分割区域,不利于提取出有意义的部分,因此这里将Sigma 值设得大一些,使波峰变得平滑。图(b)为Sigma为8.0时对灰度直方图进行高斯平滑后的效果,可见波峰明显减少到了3个,因此图像中自动分割的区域也减少到了3部分。
因此,Sigma的值越大,平滑效果越显著,直方图波峰越少,分割出的区域也越少;反之,Sigma的值越小,直方图平滑的效果越不明显,分割的次数也越多。同时可以使用gray_histo 算子和gen_region_histo 算子查看Sigma参数对灰度直方图的影响。
3. 自动全局阈值分割方法
除了auto_threshold算子外,还常用binary_threshold算子对直方图波峰图像进行自动阈值分割。binary_threshold 算子同样利用了直方图,但不同的是,该算子是根据直方图中的像素分布提供可选的分割方法,如使用最大类间方差法或平滑直方图法,都可以自动计算出一个灰度级别用于分割区域。
同时,该算子也可以选择提取较亮还是较暗的范围,尤其适用于在比较亮的背景图像上提取比较暗的字符。举例如下:
read_image (Image, 'data/codes')
rgbl_to_gray (Image, GrayImage)
binary threshold (GrayImage, RegionMaxSeparabilityLight, 'max _separability', 'dark', UsedThreshold)
该程序运行效果如图所示,其中图(a)为灰度图像,图(b)为使用binary _threshold算子进行阈值分割后的图像。
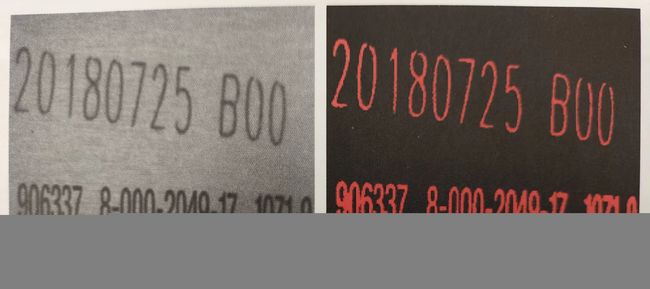
binary_threshold算子的前两个参数分别为输入和输出的对象。第3个参数为分割的方法,这个例子中选择max_separability,表示在直方图中对最大的可分性进行分割;也可以选择smooth histo,表示平滑直方图,平滑的原理与auto_threshold算子类似。第4个参数表示提取前景还是背景,这里选择dark,表示提取较暗的部分;也可以选择light,表示提取较亮的部分。最后一个参数UsedThreshold 为返回结果,将返回所用的阈值。
4. 局部阈值分割方法
上文介绍了几种全局阈值分割方法,本小节介绍一个基于局部阈值分割的dyn_threshold算子。它适用于一些无法用单一灰度进行分割的情况,如背景灰度比较复杂,有的部分比前景目标亮,有的部分比前景目标暗;又如前景目标包含多种灰度,因而无法用全局阈值完成分割。该算子利用邻域,通过局部灰度对比,找到一个合适的阈值进行分割。
dyn_threshold 算子的应用步骤一般分三步:首先,读取原始图像;然后,使用平滑滤波器对原始图像进行适当平滑;最后,使用dyn threshold算子比较原始图像与均值处理后的图像局部像素差异,将差异大于设定值的点提取出来。
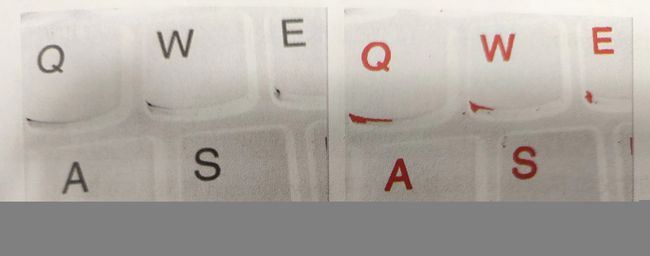
举一个例子,如图(a)所示,该图中前景部分的字符颜色不均匀,无法用单一的灰度阈值进行提取,因此可以使用局部阈值分割方法进行提取。代码举例如下:
read_image (Image, Idata/text')
*将图像转换为灰度图
rgb1_to_gray (Image, GrayImage)
*由于图像对比度比较低,因此对图像进行相乘,增强对比度
mult_image (GrayImage, GrayImage, ImageResult, 0.005, 0)
*使用平滑滤波器对原始图像进行适当平滑
mean _image (ImageResult, ImageMean, 50,50)
*动态阈值分割,提取字符区域
dyn_threshold (ImageResult, ImageMean, RegionDynThresh, 4, 'not_equal')
*开运算,去除无意义的小的杂点
opening_circle (RegionDynThresh, Region0pening, 1.5)
*显示结果
dev_clear_window()
dev_display (RegionOpening)
该段代码运行效果如图所示,其中图(a)为灰度图像,图像中的字符部分颜色不均;图(b)为用dyn_threshold算子进行阈值分割后的图像。
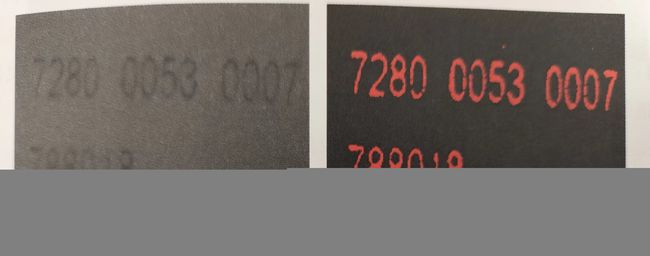
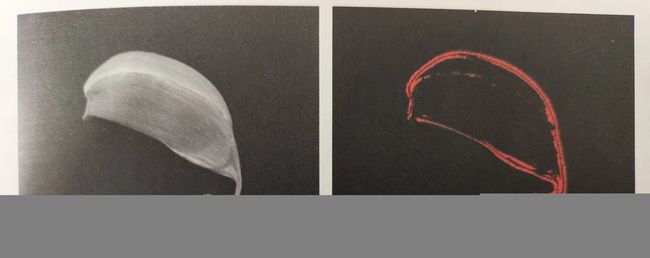
再举一个使用动态阈值进行轮廓提取的例子。如图(a)所示,该图的前景与背景部分灰度都不均匀,因而无法用全局阈值进行提取,这时可以用dyn_threshold算子提取前景的轮廓。代码如下:
read_image (Image, 'data/garlic')
*将图像转换为灰度图
rgbl_to_gray (Image, GrayImage)
*使用平滑滤波器对原始图像进行适当平滑
mean_image (GrayImage, ImageMean, 30,30)
*动态阈值分割,提取字符区域
dyn_threshold (GrayImage, ImageMean, RegionDynThresh, 30, 'not_equal')
*腐蚀操作,去除杂点
erosion_circle (RegionDynThresh, RegionClosing, 1.5)
该段代码运行效果如图所示,其中图(a)为灰度图像,前景目标灰度复杂,背景因为光
照不均匀,局部甚至比前景目标更亮;图(b)为使用dyn_threshold算子进行阈值分割后的图像。
dyn_threshold算子的第1个参数为输入的灰度图像。第2个参数为输入的预处理图像,这里食用Mean_Image得到了一张均值图像,用于做局部灰度对比。第3个参数为输出的阈值区域。第。个参数是offset值,是将原图与均值图像作对比后设定的值,灰度差异大于该值的将被提取出来第5个参数决定了提取的是哪部分区域,一般有如下4个选择。
(1)light:表示原图中大于等于预处理图像像素点值加上offset值的像素被选中。
(2)dark:表示原图中小于等于预处理图像像素点值减去offset 值的像素被选中。
(3)equal:表示原图中像素点大于预处理图像像素点值减去offset值,小于预处理图像像素点值加上offset 值的点被选中。
(4)not_equal:表示与equal相反,它的提取范围在equal范围以外。
该算子适用于在复杂背景下提取前景目标的轮廓,或无法用单一灰度阈值提取边缘等情况。注意
实际应用中可以根据图像的灰度值,设置均值滤波器的系数和动态阙值的参数。
5. var_threshold算子
除了dyn threshold算子可以利用局部像素灰度差进行分割外,var_threshold算子也是一种基于局部动态阈值的分割方法。该方法分割的依据是局部的均值和标准差,选择图像中邻域像素满足阈值条件的区域进行分割。该阈值不是一个固定的值,而是在点(x,))的邻域中使用矩形mask进行扫描,分别用点(x,y)的灰度与均值图像中的点(x,y)的灰度,和矩形的中心点的标准差灰度进行比较。该矩形 mask的长宽需要是奇数,这样便于找到矩形的中心点,其具体的宽和高应该略大于待分割的图像区域。举例如下:
read _image (Image,'data/holes')rgbl _to_gray (Image, GrayImage)*设置矩形,选择感兴趣区域
gen_rectanglel (Rectangle, 170, 80, 370, 510)
reduce_domain (GrayImage, Rectangle, ImageReduced)
var _threshold (ImageReduced, Region, 15, 15, 0.2, 35, 'dark')
该程序的运行效果如图所示,其中图(a)为输入图像,图(b)为使用 var_threshold算子进行阈值分割后的图像,灰度变化符合阈值的区域被提取了出来。

该算子的第1个参数为输入的灰度图像;第2个参数为输出的阈值区域;第3个和第4个参数为用于扫描邻域的矩形 mask的宽和高;第5个参数为标准差因子,用于计算灰度标准差,默认为0.2;第6个参数为设定的绝对阈值,该值用于比较矩形区域内的灰度标准差与均值图像的最小灰度值;第7个参数决定了提取的是哪部分区域,一般有4个选择,即dark、light、equal、not_equal,具体解释与dyn_threshold算子相同。
6 . char_threshold 算子
核算子一般用来提取字符,适用于在明亮的背景上提取黑暗的字符。该算子的运算过程如下:首先计算一个灰度曲线;然后给定一个Sigma值,用于平滑这个曲线;最后将前景与背景区分开来。分割的阈值取决于直方图中的最大值。例如,如果选择百分比为95%,灰度阈值将锁定在距离直方图峰值的5%左右的区域,因为这个算子假定的是字符的灰度都暗于背景。举例如下:
read_ image (Char, 'data/char')
rgbl_to_gray (Char, GrayImage)
char_threshold (GrayImage, GrayImage, Characters, 6, 95, Threshold)
该程序的运行效果如图所示,其中图(a)为灰度图像,图(b)为使用char_threshold算子进行阈值分割后的图。
与binary_threshold 算子相比,char_threshold算子适用于直方图的波峰之间没有明确的谷底的情况,或者是直方图没有明确的峰值的情况。这种情况是可能出现的,如图像中只包含几个字符,或者是存在不规则光照。
7. dual_threshold算子
该算子表示双阈值处理,其原型如下:
dual threshold(Image : RegionCrossings : MinSize, MinGray, Threshold
该定义来自Halcon官方文档。其第1个参数为输入图像,第2个参数为阈值处理的输出区域,第3个参数为分割出的区域的最小面积,第4个参数为区域的灰度下限,第5个参数为灰度阈值Threshold。该阈值处理可以看作是对两个方向进行了阈值分割,不但提取出了灰度大于等于Threshold 值的范围,也提取出了小于等于-Threshold值的范围。
之所以会有负的灰度值,是因为dual threshold算子在处理之前一般会先对原始图像进行拉普拉斯操作,输入的图像一般是拉普拉斯图像,这类图像包含正的和负的灰度值的区域。
满足灰度阈值并符合面积条件,同时还满足最小灰度条件的区域将最终被分割出来。