LeNet网络(1989年提出,1998年改进)
LeNet网络(1989年提出,1998年改进)
1.LeNet网络简介
LeNet:
LeNet卷积神经网络的雏形:1989年,LeCun等人设计了用于手写邮政编码的卷积神经网络,并使用反向传播算法训练卷积神经网络,将其应用与美国邮政服务。
性能:LeNet网络性能优异,在邮政编码数字数据集上的测试结果显示,该网络错误率仅为1%。
限制:由于当时计算机硬件能力限制,卷积神经网络规模无法进一步增大,制约了其在更复杂任务以及更大数据集上的发展,没有引起广泛关注
LeNet-5网络:卷积神经网络的经典之作和开山之作、先驱。
应用:最先被用于处理计算机视觉的问题,在识别手写体数字的准确性上取得了非常好的成绩。
发展:1998年出现改进版本LeNet-5。
1998年论文:《Gradient-Based Learning Applied to Document Recognition》——Yann LeCun等
主要用于手写字符的识别。
地位:层数较少,包含卷积层、池化层、全连接层等深度神经网络的基本模块,可以作为学习其他深度网络模型的基础。
LeNet-5网络结构如图0所示
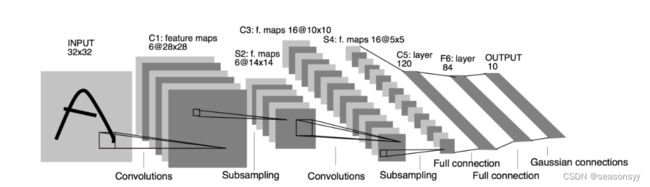
图0
LeNet-5网络从左往右分别是INPUT层、C1层、S2层、C3层、S4层、C5层、F6层和OUTPUT层。
一共包括输入层、两个卷积层(Convolutions)、两个池化层(Pooling/ 下采样层 Subsampling)、三个全连接层(Full connection)。
它的输入是一个32× 32× 1的灰度图像;输出则有10个分类,分别代表10个手写字符0~9
接下来分层介绍:
(1)INPUT层(输入层)
默认输入数据必须是一个32× 32× 1的灰度图像,即高度和宽度均为32的单色彩通道图像。
实际上,输入图像原始大小为28×28像素,其中的字符大小不超过20× 20像素,此处将输入图像补全至32× 32像素,以确保经过卷积层后,图像中位于边缘的信息不会丢失。
(2)C1层(第一个卷积层)
使用的卷积滑动窗口大小为5× 5× 1,步长为1,不使用Padding(填充)。
套用卷积通用公式:
o u t p u t = [ ( i n p u t − f i l t e r S i z e + 2 ∗ p a d d i n g ) / s t r i d e ] + 1 output=[(input-filterSize+2*padding)/stride]+1 output=[(input−filterSize+2∗padding)/stride]+1
输出特征图的高度和宽度为28=[(32-5+2*0)/1]+1
同时在图0中可以看到,这个卷积层最后要求的深度输出深度为6的特征图,因此需要进行6次同样的卷积操作(6个卷积核),最后得到的输出特征图的维度为28× 28×6.
经过了一层卷积,图像尺寸变小了,但是深度却增加了
(3)S2层(第一个池化层/下采样层/汇聚层)
下采样层的功能:缩减输入特征图的大小,这里使用最大汇聚层进行下采样
输入特征图的维度为28× 28×6.
S2层采样方式比较特殊,包含可学习的参数。形式上看更类似于卷积核尺寸为2*2,步长为2的不重叠卷积。
不同的是,其输出为:

对于2×2内的4个输入数据xi,首先求和,然后乘以一个可训练参数w,再加上一个可训练偏置b,得到的结果通过Sigmoid函数进行激活。
由于输入为6通道数据,所以S2层有6个可学习的运算核,共12个可学习的参数。
并且,S2层实质上包含了激活层,采用的激活函数为Sigmoid函数。
输出特征图尺寸:[(28-2+2×0)/2]+1=14
最后得到的输出特征图的维度为14× 14×6.
在这篇论文写成的年代,人们普遍喜欢用平均池化方法,所以LeNet-5网络的所有池化操作都采取平均池化。
注:池化操作不改变特征图的深度,即通道数不会变
(4)C3层(第二个卷积层)
卷积核:5×5×6,因为输入特征图的维度为14 ×14×6,所以卷积核窗口的深度必须和输入特征图深度一致。
步长为1,不使用Padding。
输出特征图大小:[(14-5+2×0)/1]+1=10
同时,这个卷积层要求最后输出深度为16的特征图,因此需要进行16次卷积,最后得到的输出特征图的维度为
10× 10×16
(5)S4层(第二个池化层/下采样层/汇聚层)
输入特征图是C3输出的维度为10× 10×16的特征图
滑动窗口大小2× 2×16,步长为2
输出特征图的高度和宽度:[(10-2+2×0)/2]+1=5
最后输出的特征图维度为5×5×16
(6)C5层(第一个全连接层)
是卷积池化层和后面的全连接层的第一个中间层/隐含层,可以看做第3个卷积层,由120个神经元组成,激活函数采用Tanh或Sigmoid函数
输入的特征图维度为5×5×16
卷积核滑动窗口大小:5×5×16,步长为1,不使用Padding。
最后输出的特征图的高度和宽度:[(5-5+2×0)/1]+1=1
同时这个卷积层要求最后输出的深度为120的特征图,因此需要进行120次卷积,最后得到的输出特征图的维度为1×1×120,实际上实现了二维数据的展平。
(7)F6层(第二个全连接层)
是卷积池化层和后面的全连接层的第二个中间层/隐含层。由84个神经元构成,激活函数与上一层相同,Tanh或Sigmoid函数
输入数据数据是维度为1×1×120的特征图。
最后要求输出深度为84的特征图,因此本层任务就是对输入特征图进行压缩,最后得到维度为 1×84的特征图。
要完成这个过程,需要让输入特征图乘以一个维度为120×84的权重参数。
根据矩阵运算规则:[1×120]×[120× 84]=[1×84]
输出节点数为84:,之所以选择84,是因为将特征图映射到7×12=84大小的ASCII码比特图像中。
每个图像中,-1表示白色,1表示黑色,这样每个符号的比特图的黑白色就对应与一个编码。
输出特征图:维度为1×84的矩阵
(8)OUTPUT层(输出层/全连接层)
output层也是全连接层,共有10个节点,分别代表数字0~9
因为LeNet-5是用来解决分类问题的,所以需要根据输入图判断图像中手写数字的类别,输出的结果是输入图像对应10个类别的可能性。
在此之前,需要先将F6层输入的维度为184的数据压缩成维度为1×10的数据,依靠一个维度为84× 10的矩阵完成。(output层有8410=840个参数和连接)
[1×84]×[84× 10]=[1×10]
将最终得到的10个数据全部输入Softmax激活函数中,得到的就是模型预测的输入图像所对应的10个类别的可能性值。
总结LeNet-5网络结构:
(1)C1层使用6个5×5卷积核,做步长为1的卷积,激活函数使用Tanh或Sigmoid函数,且有偏值。
(2)S2层做2×2的平均池化
(3)C3层使用16个5×5卷积核,做步长为1的卷积,激活函数使用Tanh或Sigmoid函数,且有偏值。
(4)S4层做2×2的平均池化
(5)C5层有120个神经元,激活函数使用Tanh或Sigmoid函数,且有偏值。
(6)F6层有84个神经元,Tanh或Sigmoid函数,且有偏值。
(7)分类器有10个分类输出
| layer_name | input | kernel_size | kernel_num | stride | padding | output |
|---|---|---|---|---|---|---|
| C1层(卷积层) | 32× 32×1 | 5×5 | 6 | 1 | 0 | [(32-5+2×0)/1]+1=28 28×28×6 |
| S2层(池化层) | 28*28×6 | 2×2 | 6 | 2 | 0 | [(28-2+2×0)/2]+1=14 14× 14×6 |
| C3层(卷积层) | 14× 14×6 | 5×5 | 16 | 1 | 0 | [(14-5+2×0)/1]+1=10 10× 10×16 |
| S4层(池化层) | 10× 10×16 | 2×2 | 16 | 2 | 0 | [(10-2+2×0)/2]+1=5 5×5×16 |
| C5层(全连接层) | 5×5×16 | 5×5 | 16 | 1 | 0 | [(5-5+2×0)/1]+1=1 1×1×120 |
| F6层(全连接层) | 1×1×120 | [1×120]×[120× 84]=[1× 84] 1×84 | ||||
| output层(全连接层) | 1×84 | [1×84]×[84× 10]=[1× 10] 1×10 |
2.LeNet网络代码讲解
图像分类篇:pytorch官方demo代码讲解
参考:
b站博主@霹雳吧啦Wz:https://space.bilibili.com/18161609/channel/index
github:https://gitcode.net/mirrors/wzmiaomiao/deep-learning-for-image-processing?utm_source=csdn_github_accelerator
代码位置:\deep-learning-for-image-processing-master\pytorch_classification\Test1_official_demo
用到了pytorch官网对应代码:https://pytorch.org/tutorials/beginner/blitz/cifar10_tutorial.html
这节课主要内容:
- 讲解LeNet网络的模型
- 通过pytorch搭建了LeNet的模型
- 介绍了CIFAR10数据集,下载了数据集,对数据集进行了预处理
- 查看了数据集,导入LeNet模型
- 定义了损失函数、优化器
- 进行网络的训练,并将训练好的权重保存
- 通过pridect.py脚本调用保存好的模型权重进行预测
Pytorch Tenor的通道排序:[batch ,channel,height,width]
讲解的LeNet-5网络示意图,如图0

图0
讲解页面:model.py
import torch.nn as nn
import torch.nn.functional as F
class LeNet(nn.Module):
def __init__(self):
super(LeNet, self).__init__()
#输入图像矩阵深度=3,输出图像矩阵深度/卷积核个数=16,卷积核大小5*5
self.conv1 = nn.Conv2d(3, 16, 5)
self.pool1 = nn.MaxPool2d(2, 2)#池化核2*2,步长=2
#输入图像矩阵深度=16(因为第一个卷积层输出矩阵深度为16,池化层不改变图像深度),输出图像矩阵深度/卷积核个数=32,卷积核大小5*5
self.conv2 = nn.Conv2d(16, 32, 5)
self.pool2 = nn.MaxPool2d(2, 2)#池化核2*2,步长=2
#全连接层 全连接层的输入是一个一维的向量,所以需要将得到的特征矩阵展平,展成一个一维的向量。
#图0中这一层的结点个数是120,所以第二个参数是120(120这个参数是自定义的)
self.fc1 = nn.Linear(32*5*5, 120)
#第二个全连接层的输入是第一个全连接层的输出:120个节点。
#图0中这一层设置的是84个节点,所以第二个参数是84(84这个参数是自定义的)
self.fc2 = nn.Linear(120, 84)
#最后一个全连接层的输入是上一层的输出:84个节点
#输出需要根据训练集来进行修改,因为今天使用的训练集是有10个类别的,所以第二个参数设置成10
self.fc3 = nn.Linear(84, 10)
#正向传播过程
#x代表输入的数据,数据就是pytorch Tensor的通道顺序:[batch,channel,height,width]
def forward(self, x):
#首先数据经过卷积层1(conv1),然后得到的输出通过relu激活函数
x = F.relu(self.conv1(x)) # input(3, 32, 32) output(16, 28, 28)
#然后再将上面的输出经过下采样一层(pool1)
x = self.pool1(x) # output(16, 14, 14)
#将上面的输出进入到第二个卷积层(conv2),然后得到的输出通过relu激活函数
x = F.relu(self.conv2(x)) # output(32, 10, 10)
#然后再将输出通过第二个下采样层(pool2)
x = self.pool2(x) # output(32, 5, 5)
#接下来要把数据放到全连接层中,但是全连接层的输入是一维向量。所以要把现在的向量展平成一维向量
#做法:使用.view函数展平向量,第一个参数-1代表第一个维度,进行自动推理(因为第一维是batch,所以设置成-1)第二个维度是展平后的节点的个数32*5*5
x = x.view(-1, 32*5*5) # output(32*5*5)
#全连接层1,如图0中,自定义了120个节点,所以第一个全连接层的输出是120
x = F.relu(self.fc1(x)) # output(120)
#全连接层2,自定义了输出是84个节点
x = F.relu(self.fc2(x)) # output(84)
#全连接层3,自定义了输出是10个节点
#输出需要根据训练集来进行修改,因为今天使用的训练集是有10个类别的,所以第二个参数设置成10
x = self.fc3(x) # output(10)
#为什么这里没有用softmax层(对于一般分类问题最后一个全连接层会跟上一个softmax层,将输出转化成为一个概率分布,理论上确实应该这么做,但是在我们训练网络过程中,计算卷积交叉熵的过程中已经实现了一个更加高效的softmax方法,所以在这里不需要添加softmax层了)
return x
在pytorch中搭建模型流程:
-
新建一个类LeNet,这个类继承自nn.Module这个父类
-
在这个类中实现两个方法:
- 一个是初始化函数:def__ init__(self)
初始化函数中会实现在搭建网络过程中所使用的一些网络层结构
首先使用super这个函数,(只要涉及到多继承,都会使用super这个函数)
- 定义第一个卷积层:在pytorch中定义卷积层用 nn.Conv2d函数
ctrl点入Conv2d中去:
def __init__( self, in_channels: int, #输入图像矩阵的深度(RGB就是3) out_channels: int,#输出特征矩阵的深度=卷积核的个数 kernel_size: _size_1_t,#卷积核的大小 stride: _size_1_t = 1,#步长,默认为1 padding: Union[str, _size_1_t] = 0,#在四周进行补0处理,默认=0 dilation: _size_1_t = 1,#高阶用法 groups: int = 1,#高阶用法 bias: bool = True,#偏执,默认使用=True padding_mode: str = 'zeros', # TODO: refine this type device=None, dtype=None )经卷积后的矩阵尺寸大小计算公式为:N=(W-F+2P)/S+1
- 输入图片大小W×W
- Filter大小F×F(卷积核大小)
- 步长S
- padding的像素数P
所以第一个卷积层的输出计算:
- 输入大小为:32×32,卷积核大小为5×5,步长默认=1,padding默认=0.
- 使用公式计算得出N=28.即输出图像的大小为28×28
- 输出图像的深度=卷积核的个数=16
- 所以输出图像尺寸为:16× 28× 28
- 定义下采样层:pool1。使用的方法:nn.MaxPool2d
ctrl点入MaxPool2d中去:
class _MaxPoolNd(Module): __constants__ = ['kernel_size', 'stride', 'padding', 'dilation', 'return_indices', 'ceil_mode'] return_indices: bool ceil_mode: bool def __init__(self, kernel_size: _size_any_t, stride: Optional[_size_any_t] = None, padding: _size_any_t = 0, dilation: _size_any_t = 1, return_indices: bool = False, ceil_mode: bool = False) -> None: super().__init__() self.kernel_size = kernel_size #stride步长指定或者步长=卷积核大小 self.stride = stride if (stride is not None) else kernel_size self.padding = padding self.dilation = dilation self.return_indices = return_indices self.ceil_mode = ceil_mode因为池化只改变特征矩阵的宽和高,不改变channel
所以池化层之后的输出矩阵深度=16(前一个卷积层的输出作为这个池化层的输入)
步长=2,所以输出的图像大小缩小为输入的一半,输入是28× 28,所以输出时14× 14
- 定义第二个卷积层:conv2。使用nn.Conv2d函数。
- 定义第二个池化层:pool2。使用nn.MaxPool2d函数。
- 一个是forward函数中定义正向传播的过程:def forward(self, x)
当我们实例化这个类之后,将参数传入到实例中就会进行正向传播(也就是按照forward这个顺序进行运行)
讲解页面:train.py层
def main():
# transform这个函数首先通过transforms.Compose这个函数将所要使用的一些预处理方法给打包成为一个整体
# 在这里使用了两个预处理方法:
# 第一个是ToTensor,ctrl点进去看具体功能
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
ToTensor函数ctrl点进去:
class ToTensor: #这是一个把PIL图像或者ndarray转化成tensor的函数 """Convert a PIL Image or ndarray to tensor and scale the values accordingly. This transform does not support torchscript. # 导入的图片不管是通过PIL导入还是通过ndarray导入,所显示的数据图像的顺序是高度Height*宽度#Width*通道数/深度Channels。每个维度的像素值范围都是0-255 Converts a PIL Image or numpy.ndarray (H x W x C) in the range [0, 255] to a torch. #通过ToSensor这个函数把shape变成了通道数/深度Channels*高度Height*宽度#Width。 #并且将每个维度的像素值范围从0-255变成了0-1 FloatTensor of shape (C x H x W) in the range [0.0, 1.0] if the PIL Image belongs to one of the modes (L, LA, P, I, F, RGB, YCbCr, RGBA, CMYK, 1)总结:Tensor作用:
原来输入图像的通道顺序是高度Height×宽度#Width*深度Channels。且每个维度的像素值范围都是0-255
通过ToSensor这个函数把shape变成了深度Channels × 高度Height× 宽度Width。
并且将每个维度的像素值范围从0-255变成了0-1
Normalize函数ctrl点进去:
class Normalize(torch.nn.Module): #使用均值和标准差来标准化我们的tensor #计算过程:输出=(原始数据-均值)/标准差 """Normalize a tensor image with mean and standard deviation. This transform does not support PIL Image. #提供的参数有均值mean,标准差std #这个模型将会标准化每个输入的通道 Given mean: ``(mean[1],...,mean[n])`` and std: ``(std[1],..,std[n])`` for ``n`` channels, this transform will normalize each channel of the input ``torch.*Tensor`` i.e., #计算过程:输出=(原始数据-均值)/标准差 ``output[channel] = (input[channel] - mean[channel]) / std[channel]``
运行train.py页面,结果如图1
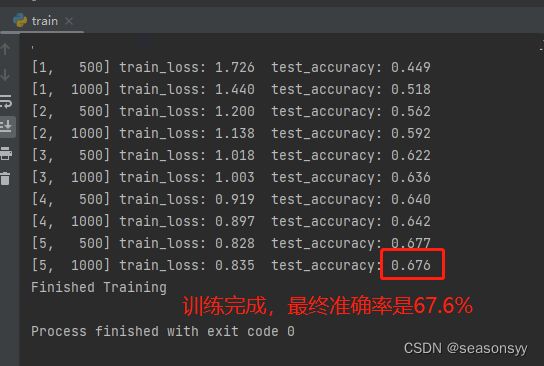
图1
训练完之后在目前的根目录下生成了一个模型权重文件:Lenet.pth,如图2
图2
然后在网上下载一张飞机的图片,放到目前项目的根目录中。
打开predict.py文件,这个文件就是调用模型权重进行预测的脚本
运行完之后,得到结果,如图3

图3
3.参考文献
1.《深度学习与神经网络》 赵眸光 编著
出版社:电子工业出版社 2023年1月第一版
ISBN: 978-7-121-44429-6
2.《深度卷积神经网络 原理与实践》周浦城 李从利 王勇 韦哲 编著
出版社:北京:电子工业出版社,2020.10
ISBN: 978-7-121-39663-2
3.《Python神经网络 入门与实践》 王凯 编著
出版社:北京大学出版社
ISBN: 9787301316290
4. b站博主@霹雳吧啦Wz:https://www.bilibili.com/video/BV187411T7Ye/?spm_id_from=333.788&vd_source=647760d93691c99109dee33aad004b62