- 感赏日志133
马姐读书
图片发自App感赏自己今天买个扫地机,以后可以解放出来多看点书,让这个智能小机器人替我工作了。感赏孩子最近进步很大,每天按时上学,认真听课,认真背书,主动认真完成老师布置的作业。感赏自己明白自己容易受到某人的影响,心情不好,每当此刻我就会舒缓,感赏,让自己尽快抽离,想好的一面。感赏儿子今天在我提醒他事情时,告诉我谢谢妈妈对我的提醒我明白了,而不是说我啰嗦,管事情,孩子更懂事了,懂得感恩了。投射父母
- 每日算法&面试题,大厂特训二十八天——第二十天(树)
肥学
⚡算法题⚡面试题每日精进java算法数据结构
目录标题导读算法特训二十八天面试题点击直接资料领取导读肥友们为了更好的去帮助新同学适应算法和面试题,最近我们开始进行专项突击一步一步来。上一期我们完成了动态规划二十一天现在我们进行下一项对各类算法进行二十八天的一个小总结。还在等什么快来一起肥学进行二十八天挑战吧!!特别介绍小白练手专栏,适合刚入手的新人欢迎订阅编程小白进阶python有趣练手项目里面包括了像《机器人尬聊》《恶搞程序》这样的有趣文章
- matlab mle 优化,MLE+: Matlab Toolbox for Integrated Modeling, Control and Optimization for Buildings...
Simon Zhong
matlabmle优化
摘要:FollowingunilateralopticnervesectioninadultPVGhoodedrat,theaxonguidancecueephrin-A2isup-regulatedincaudalbutnotrostralsuperiorcolliculus(SC)andtheEphA5receptorisdown-regulatedinaxotomisedretinalgan
- 基于STM32与Qt的自动平衡机器人:从控制到人机交互的的详细设计流程
极客小张
stm32qt机器人物联网人机交互毕业设计c语言
一、项目概述目标和用途本项目旨在开发一款基于STM32控制的自动平衡机器人,结合步进电机和陀螺仪传感器,实现对平衡机器人的精确控制。该机器人可以用于教育、科研、娱乐等多个领域,帮助用户了解自动控制、机器人运动学等相关知识。技术栈关键词STM32单片机步进电机陀螺仪传感器AD采集电路Qt人机界面实时数据监控二、系统架构系统架构设计本项目的系统架构设计包括以下主要组件:控制单元:STM32单片机传感器
- 笋丁网页自动回复机器人V3.0.0免授权版源码
希希分享
软希网58soho_cn源码资源笋丁网页自动回复机器人
笋丁网页机器人一款可设置自动回复,默认消息,调用自定义api接口的网页机器人。此程序后端语言使用Golang,内存占用最高不超过30MB,1H1G服务器流畅运行。仅支持Linux服务器部署,不支持虚拟主机,请悉知!使用自定义api功能需要有一定的建站基础。源码下载:https://download.csdn.net/download/m0_66047725/89754250更多资源下载:关注我。安
- Spring Boot中实现跨域请求
BABA8891
springboot后端java
在SpringBoot中实现跨域请求(CORS,Cross-OriginResourceSharing)可以通过多种方式,以下是几种常见的方法:1.使用@CrossOrigin注解在SpringBoot中,你可以在控制器或者具体的请求处理方法上使用@CrossOrigin注解来允许跨域请求。在控制器上应用:importorg.springframework.web.bind.annotation.
- rose中原焦点团队网络初级27期、中级27期分享第201天20211019
rosewshx
今天出差回来上班,很多事情又都拥挤到了一起,列表排序逐一落实吧。排出来心里就不慌乱了,稳得住事情去逐一解决。调整烦躁慌乱的心态,平稳住按部就班就好,让觉察时时在。
- 新能源汽车 BMS 学习笔记篇—BMS 基本定义及分类
WPG大大通
其他笔记汽车BMS经验分享新能源电池
一、BMS定义1、概念:BMS(BatteryManagementSystem)即电池管理系统,其管理对象是二次电池(充电电池或蓄电池),其主要目的是电池的利用率,防止电池出现过度充电和过度放电,可应用于电动汽车、电瓶车、机器人、无人机等图片来源:腾讯网https://new.qq.com《标准普尔警告,电动汽车电池生产面临供应链和地缘政治风险》2、四大功能①感知和测量:检测电池的电压、电流、温度
- 【Golang】使用 Golang 语言和 excelize 库将数据写入Excel
不爱洗脚的小滕
golangexcel开发语言
文章目录前言一、Excelize简介二、代码实现1.获取依赖2.示例代码三、总结前言在数据处理和分析中,Excel作为一种常见的电子表格格式,被广泛应用于各种场景。然而,如何在Go语言中有效地处理Excel文件呢?在这篇博客中,我将介绍如何使用Go语言和excelize库将数据写入Excel文件。一、Excelize简介Excelize是一个用于读取和写入MicrosoftExcel™(XLSX)
- ArcGIS Pro SDK (十四)地图探索 5 时间与动画
WineMonk
ArcGISProSDKarcgisarcgisprosdkgisc#
ArcGISProSDK(十四)地图探索5时间与动画文章目录ArcGISProSDK(十四)地图探索5时间与动画1时间1.1时间提前1个月1.2禁用地图中的时间。2动画2.1设置动画长度2.2缩放动画2.3相机关键帧2.4插值相机2.5插值时间2.6插值范围2.7创建摄像机关键帧2.8创建时间关键帧2.9创建范围关键帧2.10创建图层关键帧环境:VisualStudio2022+.NET6+Arc
- python可以制作大型游戏_python能做游戏吗-python能开发游戏吗
靖dede
python可以制作大型游戏
python可以写游戏,但不适合。下面我们来分析一下具体原因。用锤子能造汽车吗?谁也没法说不能吧?历史上也确实曾经有些汽车,是用锤子造出来的。但一般来说,还是用工业机器人更合适对吗?比较大型的,使用Python的游戏有两个,一个是《EVE》,还有一个是《文明》。但这仅仅是个例,没有广泛意义。一般来说,用来做游戏的语言,有两种。一是C++。。一是C#。。Python理论上,不仅不适合做游戏,而是只要
- python中zeros用法_Python中的numpy.zeros()用法
江平舟
python中zeros用法
numpy.zeros()函数是最重要的函数之一,广泛用于机器学习程序中。此函数用于生成包含零的数组。numpy.zeros()函数提供给定形状和类型的新数组,并用零填充。句法numpy.zeros(shape,dtype=float,order='C'参数形状:整数或整数元组此参数用于定义数组的尺寸。此参数用于我们要在其中创建数组的形状,例如(3,2)或2。dtype:数据类型(可选)此参数用于
- 【NumPy】深入解析numpy.zeros()函数
二七830
numpy
欢迎莅临我的个人主页这里是我深耕Python编程、机器学习和自然语言处理(NLP)领域,并乐于分享知识与经验的小天地!博主简介:我是二七830,一名对技术充满热情的探索者。多年的Python编程和机器学习实践,使我深入理解了这些技术的核心原理,并能够在实际项目中灵活应用。尤其是在NLP领域,我积累了丰富的经验,能够处理各种复杂的自然语言任务。技术专长:我熟练掌握Python编程语言,并深入研究了机
- 神经网络-损失函数
红米煮粥
神经网络人工智能深度学习
文章目录一、回归问题的损失函数1.均方误差(MeanSquaredError,MSE)2.平均绝对误差(MeanAbsoluteError,MAE)二、分类问题的损失函数1.0-1损失函数(Zero-OneLossFunction)2.交叉熵损失(Cross-EntropyLoss)3.合页损失(HingeLoss)三、总结在神经网络中,损失函数(LossFunction)扮演着至关重要的角色,它
- 基于TRIZ的救援机器人轻量化设计
天行健王春城老师
TRIZ机器人
在救援机器人设计中,轻量化是一个至关重要的目标,它直接关系到机器人的便携性、运输效率以及在复杂环境中的作业能力。TRIZ理论为我们提供了一套系统化的工具和方法,用于解决设计过程中遇到的各种挑战,特别是在实现轻量化目标时,TRIZ能够帮助我们识别并消除设计中的冗余与低效部分,同时保留或增强其关键功能。具体如深圳天行健企业管理咨询公司下文所述:1.功能分析与矛盾识别TRIZ理论强调对系统功能的深入分析
- 越长大越孤单
换个时间就好
“于今之世,孰是真身”。意思是:在今天的社会,谁是真正的自己。第一次有这种感受是在初二初三,当时平凡的我只想平凡的走完我的初中时代,不想有变故,不想多新朋友,也不想成为别人的新朋友。在数着教室里那张被多数人期待的,挂在教室后方的钟表,铃声响起结束一天百般无聊的课程,我像个机器人麻木做着和往常一样的动作,拿着装满书的书包,看着空荡荡又充满气味的凳阁,再一次想起我为什么拿着所有的书回去。直到肩膀酸痛,
- 管理员权限的软件不能开机自启动的解决方法
ss_ctrl
这是几种解决方法:1.将启动参数写入到32位注册表里面去在64位系统下我们64位的程序访问此HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\Windows\CurrentVersion\Run注册表路径,是可以正确访问的,32位程序访问此注册表路径时,默认会被系统自动映射到HKEY_LOCAL_MACHINE\SOFTWARE\WOW6432Node\Microsoft
- 静态常量(static const)|| 日志记录器
课堂随想
moveit2机器人
//AllsourcefilesthatuseROSloggingshoulddefineafile-specific//staticconstrclcpp::LoggernamedLOGGER,locatedatthetopofthefile//andinsidethenamespacewiththenarrowestscope(ifthereisone)staticconstrclcpp::L
- 【机器人建模和控制】读书笔记
Piccab0o
机器人
机器人建模和控制——马克·斯庞A.x10=x1∙x0x^0_1=x_1\bulletx_0x10=x1∙x0,其实就是:1)x1x_1x1轴向量在O0O_0O0系下的坐标2)在x0x_0x0轴上的投影3)坐标变换矩阵的R10R_1^0R10的第一个元素B.点p在o1x1y1z1o_1x_1y_1z_1o1x1y1z1系下的坐标p1p^1p1可以表示为:p=ux1+vy1+wz1p=ux_1+vy_
- 协作机器人关节模组总结
雪花飞龙
协作机器人本体结构
协作机器人关节模块总结关节模组介绍关节模组一般部件:通讯协议泰科机器人关节模组RJS系列RJS-II系列RJU系列SHD系列RGM机器人关节模组关节模组介绍协作机器人的技术已经相对成熟,如何快速生产协作机器人?如何降低机器人成本?等问题是现在研究的一个重点。协作机器人的关节功能相对独立,可以做成一个独立模块,只需要提供电源和控制信号就好。关节模组一般部件:1.减速器:谐波减速器是最常用的减速器,此
- Matlab在工业机器人中的运用,基于MATLAB的工业机器人建模与仿真.docx
weixin_34518801
摘要:机器人运动系统作为机器人系统中最重要的组成部分之一,其重要性不言而喻,因为它影响着机器人的主要性能,因此为了提高机器人的质量,对机器人进行运动学分析和仿真是不可或缺的。本次毕业设计主要对KUKA机器人的三维仿真进行了一系列的分析,主要是以下几个内容:(1)研究了机器人运动学仿真的背景意义及发展趋势。(2)通过对齐次坐标变换理论的研究,说明了KUKA机器人结构及参数,并且建立了相应的D-H参数
- 完美机器人
负债的宝贝
白叶的父母又吵架了,白叶感觉很痛苦,要是他的父母不吵架就好了。要是他的父母和他想的一样完美就好了。“你想要完美父母吗?我可以帮你实现。”白叶的手机里突然出现了这样一则短信,把白叶吓了一跳。一定是有人搞的恶作剧,白叶并不理会这条短信。但是第二天奇怪的事情就发生了。明天开一篇脑洞,我先起个头,剩下的随大家编✧٩(ˊωˋ*)و✧
- ajax的同源策略
Spring_Bear
问题之前帮忙做的广告机器人数据提交的部分,利用ajax的XMLHTTPRequest提交到服务器的时候总是报错,错误类型是不同源。想到浏览器中的同源策略,明白了问题的原因。同源策略简单的说,就是浏览器不允许两个不同源的域名之间交换信息,那么这里就有两个问题。一是,什么信息不允许交换;二是,怎样算不同源。阮一峰的这篇博客浏览器同源政策及其规避方法其实已经介绍得比较清楚。引用一下,第一个问题:目前,如
- Python(PyTorch)和MATLAB及Rust和C++结构相似度指数测量导图
亚图跨际
Python交叉知识算法量化检查图像压缩质量低分辨率多光谱峰值信噪比端到端优化图像压缩手术机器人三维实景实时可微分渲染重建三维可视化
要点量化检查图像压缩质量低分辨率多光谱和高分辨率图像实现超分辨率分析图像质量图像索引/多尺度结构相似度指数和光谱角映射器及视觉信息保真度多种指标峰值信噪比和结构相似度指数测量结构相似性图像分类PNG和JPEG图像相似性近似算法图像压缩,视频压缩、端到端优化图像压缩、神经图像压缩、GPU变速图像压缩手术机器人深度估计算法重建三维可视化推理图像超分辨率算法模型三维实景实时可微分渲染算法MATLAB结构
- cmd泛滥_与您的后泛滥同事见面:人工智能机器人
weixin_26644585
人工智能leetcode
cmd泛滥Readytoswapyouroldcube-mateforadisembodiedAI?IPsoftCEOChetanDube,creatorofAIco-workerAMELIA,giveshistakeonthepost-COVIDofficelandscape.准备将您的旧立方体伙伴换成无形的AI?AIsoft同事AMELIA的创始人IPsoft首席执行官ChetanDube阐述
- 在Flask中实现跨域请求(CORS)
ac-er8888
flaskpython后端
在Flask中实现跨域请求(CORS,Cross-OriginResourceSharing)主要涉及到对Flask应用的配置,以允许来自不同源的请求访问服务器上的资源。以下是在Flask中实现CORS的详细步骤和方法:一、理解CORSCORS是一种机制,它使用额外的HTTP头部来告诉浏览器,让运行在一个origin(域)上的Web应用被准许访问来自不同源服务器上的指定的资源。当一个资源从与该资源
- 埃隆·马斯克表示特斯拉“没有必要”授权 xAI 模型
喜好儿网
人工智能AIGC马斯克
埃隆·马斯克近日在社交媒体上对《华尔街日报》的一篇报道进行了反驳。该报道指出,马斯克旗下的电动汽车公司特斯拉可能与人工智能初创公司xAI达成了一项收入分享协议,以便特斯拉能够使用xAI的人工智能模型。据称,这些模型将被集成到特斯拉的全自动驾驶(FSD)软件中,并可能用于开发特斯拉汽车的语音助手以及人形机器人擎天柱的软件。喜好儿网然而,马斯克否认了这一说法,他在社交媒体平台上表示,尽管特斯拉确实与x
- SAP B1 Web Client & MS Teams App集成连载一:先决条件/Prerequisites
哲讯智能科技
大数据科技
一、先决条件/Prerequisites在设置SAPBusinessOne应用之前,确保您已具备以下各项:BeforeyousetuptheSAPBusinessOneapp,makesureyouhaveacquiredthefollowing:1.MicrosoftTeams管理员账户/AMicrosoftTeamsadminaccount您需要使用此账户为贵组织上传、安装、升级和卸载应用Th
- 数字化供应链架构、全景管理、全流程贯通整体解决方案:供应链管理就是利用管理工具、IT技术将企业引入外部资源的过程精细化、标准化管理,实现高效益低成本运营。
数字化建设方案
数字化转型数据治理主数据数据仓库智能制造数字工厂制造业数字化转型工业互联网供应链数字仓储智慧物流智慧仓储物流园区架构大数据
数字化供应链架构、全景管理、全流程贯通方案数字化供应链架构、全景管理、全流程贯通方案项目背景与目标供应链管理现状及挑战数字化供应链架构概念及优势全景管理与全流程贯通目标预期成果与效益智能管理机制建设需求预测与智能分析应用合同管理智能化提升举措仓储管理自动化和机器人技术应用物流配送优化策略周边系统整合与数据贯通现有系统梳理及评估报告数据接口标准制定和实施计划流程对接和数据交互机制设计监控和报警机制完
- ros2中使用launch.xml启动时,怎么在命令行里设置参数,或者加载参数文件(params.yaml)
code .
Autoware自动驾驶ROS2xmlRos2自动驾驶机器人
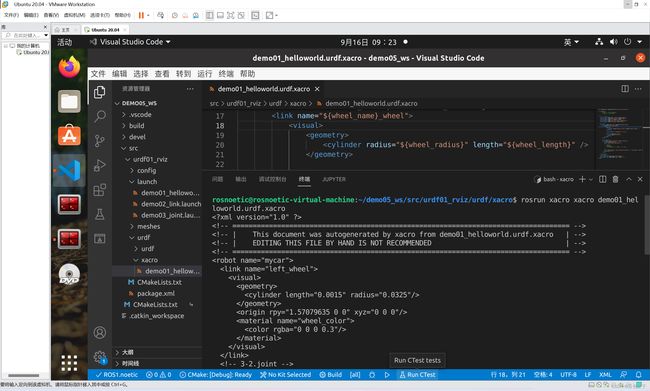
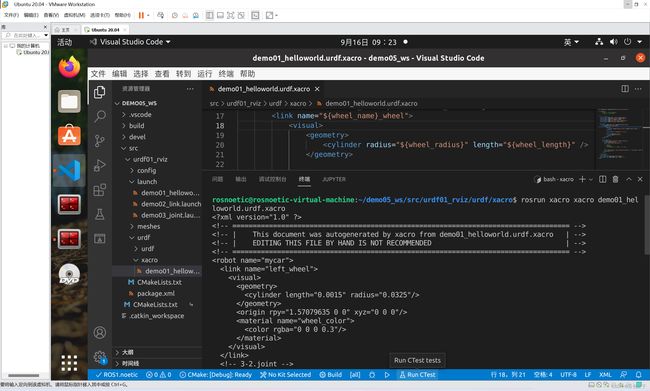
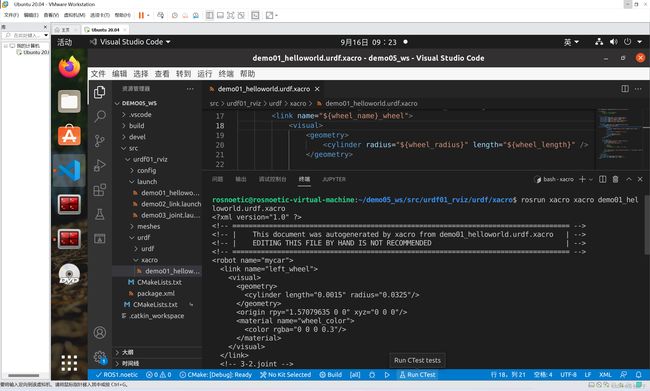
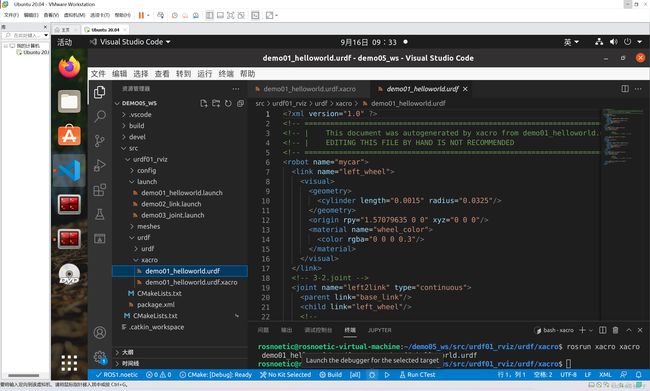
在ROS2中使用launch.xml启动时,可以通过命令行设置参数或加载参数文件(如params.yaml)。以下是具体的方法:1.在命令行中设置参数你可以在运行ros2launch命令时直接设置参数,使用key:=value的语法。例如:ros2launchparam_name:=param_value例如,如果你有一个参数background_r,你可以这样设置:ros2launchmy_pa
- 辗转相处求最大公约数
沐刃青蛟
C++漏洞
无言面对”江东父老“了,接触编程一年了,今天发现还不会辗转相除法求最大公约数。惭愧惭愧!
为此,总结一下以方便日后忘了好查找。
1.输入要比较的两个数a,b
忽略:2.比较大小(因为后面要的是大的数对小的数做%操作)
3.辗转相除(用循环不停的取余,如a%b,直至b=0)
4.最后的a为两数的最大公约数
&
- F5负载均衡会话保持技术及原理技术白皮书
bijian1013
F5负载均衡
一.什么是会话保持? 在大多数电子商务的应用系统或者需要进行用户身份认证的在线系统中,一个客户与服务器经常经过好几次的交互过程才能完成一笔交易或者是一个请求的完成。由于这几次交互过程是密切相关的,服务器在进行这些交互过程的某一个交互步骤时,往往需要了解上一次交互过程的处理结果,或者上几步的交互过程结果,服务器进行下
- Object.equals方法:重载还是覆盖
Cwind
javagenericsoverrideoverload
本文译自StackOverflow上对此问题的讨论。
原问题链接
在阅读Joshua Bloch的《Effective Java(第二版)》第8条“覆盖equals时请遵守通用约定”时对如下论述有疑问:
“不要将equals声明中的Object对象替换为其他的类型。程序员编写出下面这样的equals方法并不鲜见,这会使程序员花上数个小时都搞不清它为什么不能正常工作:”
pu
- 初始线程
15700786134
暑假学习的第一课是讲线程,任务是是界面上的一条线运动起来。
既然是在界面上,那必定得先有一个界面,所以第一步就是,自己的类继承JAVA中的JFrame,在新建的类中写一个界面,代码如下:
public class ShapeFr
- Linux的tcpdump
被触发
tcpdump
用简单的话来定义tcpdump,就是:dump the traffic on a network,根据使用者的定义对网络上的数据包进行截获的包分析工具。 tcpdump可以将网络中传送的数据包的“头”完全截获下来提供分析。它支 持针对网络层、协议、主机、网络或端口的过滤,并提供and、or、not等逻辑语句来帮助你去掉无用的信息。
实用命令实例
默认启动
tcpdump
普通情况下,直
- 安卓程序listview优化后还是卡顿
肆无忌惮_
ListView
最近用eclipse开发一个安卓app,listview使用baseadapter,里面有一个ImageView和两个TextView。使用了Holder内部类进行优化了还是很卡顿。后来发现是图片资源的问题。把一张分辨率高的图片放在了drawable-mdpi文件夹下,当我在每个item中显示,他都要进行缩放,导致很卡顿。解决办法是把这个高分辨率图片放到drawable-xxhdpi下。
&nb
- 扩展easyUI tab控件,添加加载遮罩效果
知了ing
jquery
(function () {
$.extend($.fn.tabs.methods, {
//显示遮罩
loading: function (jq, msg) {
return jq.each(function () {
var panel = $(this).tabs(&
- gradle上传jar到nexus
矮蛋蛋
gradle
原文地址:
https://docs.gradle.org/current/userguide/maven_plugin.html
configurations {
deployerJars
}
dependencies {
deployerJars "org.apache.maven.wagon
- 千万条数据外网导入数据库的解决方案。
alleni123
sqlmysql
从某网上爬了数千万的数据,存在文本中。
然后要导入mysql数据库。
悲剧的是数据库和我存数据的服务器不在一个内网里面。。
ping了一下, 19ms的延迟。
于是下面的代码是没用的。
ps = con.prepareStatement(sql);
ps.setString(1, info.getYear())............;
ps.exec
- JAVA IO InputStreamReader和OutputStreamReader
百合不是茶
JAVA.io操作 字符流
这是第三篇关于java.io的文章了,从开始对io的不了解-->熟悉--->模糊,是这几天来对文件操作中最大的感受,本来自己认为的熟悉了的,刚刚在回想起前面学的好像又不是很清晰了,模糊对我现在或许是最好的鼓励 我会更加的去学 加油!:
JAVA的API提供了另外一种数据保存途径,使用字符流来保存的,字符流只能保存字符形式的流
字节流和字符的难点:a,怎么将读到的数据
- MO、MT解读
bijian1013
GSM
MO= Mobile originate,上行,即用户上发给SP的信息。MT= Mobile Terminate,下行,即SP端下发给用户的信息;
上行:mo提交短信到短信中心下行:mt短信中心向特定的用户转发短信,你的短信是这样的,你所提交的短信,投递的地址是短信中心。短信中心收到你的短信后,存储转发,转发的时候就会根据你填写的接收方号码寻找路由,下发。在彩信领域是一样的道理。下行业务:由SP
- 五个JavaScript基础问题
bijian1013
JavaScriptcallapplythisHoisting
下面是五个关于前端相关的基础问题,但却很能体现JavaScript的基本功底。
问题1:Scope作用范围
考虑下面的代码:
(function() {
var a = b = 5;
})();
console.log(b);
什么会被打印在控制台上?
回答:
上面的代码会打印 5。
&nbs
- 【Thrift二】Thrift Hello World
bit1129
Hello world
本篇,不考虑细节问题和为什么,先照葫芦画瓢写一个Thrift版本的Hello World,了解Thrift RPC服务开发的基本流程
1. 在Intellij中创建一个Maven模块,加入对Thrift的依赖,同时还要加上slf4j依赖,如果不加slf4j依赖,在后面启动Thrift Server时会报错
<dependency>
- 【Avro一】Avro入门
bit1129
入门
本文的目的主要是总结下基于Avro Schema代码生成,然后进行序列化和反序列化开发的基本流程。需要指出的是,Avro并不要求一定得根据Schema文件生成代码,这对于动态类型语言很有用。
1. 添加Maven依赖
<?xml version="1.0" encoding="UTF-8"?>
<proj
- 安装nginx+ngx_lua支持WAF防护功能
ronin47
需要的软件:LuaJIT-2.0.0.tar.gz nginx-1.4.4.tar.gz &nb
- java-5.查找最小的K个元素-使用最大堆
bylijinnan
java
import java.util.Arrays;
import java.util.Random;
public class MinKElement {
/**
* 5.最小的K个元素
* I would like to use MaxHeap.
* using QuickSort is also OK
*/
public static void
- TCP的TIME-WAIT
bylijinnan
socket
原文连接:
http://vincent.bernat.im/en/blog/2014-tcp-time-wait-state-linux.html
以下为对原文的阅读笔记
说明:
主动关闭的一方称为local end,被动关闭的一方称为remote end
本地IP、本地端口、远端IP、远端端口这一“四元组”称为quadruplet,也称为socket
1、TIME_WA
- jquery ajax 序列化表单
coder_xpf
Jquery ajax 序列化
checkbox 如果不设定值,默认选中值为on;设定值之后,选中则为设定的值
<input type="checkbox" name="favor" id="favor" checked="checked"/>
$("#favor&quo
- Apache集群乱码和最高并发控制
cuisuqiang
apachetomcat并发集群乱码
都知道如果使用Http访问,那么在Connector中增加URIEncoding即可,其实使用AJP时也一样,增加useBodyEncodingForURI和URIEncoding即可。
最大连接数也是一样的,增加maxThreads属性即可,如下,配置如下:
<Connector maxThreads="300" port="8019" prot
- websocket
dalan_123
websocket
一、低延迟的客户端-服务器 和 服务器-客户端的连接
很多时候所谓的http的请求、响应的模式,都是客户端加载一个网页,直到用户在进行下一次点击的时候,什么都不会发生。并且所有的http的通信都是客户端控制的,这时候就需要用户的互动或定期轮训的,以便从服务器端加载新的数据。
通常采用的技术比如推送和comet(使用http长连接、无需安装浏览器安装插件的两种方式:基于ajax的长
- 菜鸟分析网络执法官
dcj3sjt126com
网络
最近在论坛上看到很多贴子在讨论网络执法官的问题。菜鸟我正好知道这回事情.人道"人之患好为人师" 手里忍不住,就写点东西吧. 我也很忙.又没有MM,又没有MONEY....晕倒有点跑题.
OK,闲话少说,切如正题. 要了解网络执法官的原理. 就要先了解局域网的通信的原理.
前面我们看到了.在以太网上传输的都是具有以太网头的数据包.
- Android相对布局属性全集
dcj3sjt126com
android
RelativeLayout布局android:layout_marginTop="25dip" //顶部距离android:gravity="left" //空间布局位置android:layout_marginLeft="15dip //距离左边距
// 相对于给定ID控件android:layout_above 将该控件的底部置于给定ID的
- Tomcat内存设置详解
eksliang
jvmtomcattomcat内存设置
Java内存溢出详解
一、常见的Java内存溢出有以下三种:
1. java.lang.OutOfMemoryError: Java heap space ----JVM Heap(堆)溢出JVM在启动的时候会自动设置JVM Heap的值,其初始空间(即-Xms)是物理内存的1/64,最大空间(-Xmx)不可超过物理内存。
可以利用JVM提
- Java6 JVM参数选项
greatwqs
javaHotSpotjvmjvm参数JVM Options
Java 6 JVM参数选项大全(中文版)
作者:Ken Wu
Email:
[email protected]
转载本文档请注明原文链接 http://kenwublog.com/docs/java6-jvm-options-chinese-edition.htm!
本文是基于最新的SUN官方文档Java SE 6 Hotspot VM Opt
- weblogic创建JMC
i5land
weblogicjms
进入 weblogic控制太
1.创建持久化存储
--Services--Persistant Stores--new--Create FileStores--name随便起--target默认--Directory写入在本机建立的文件夹的路径--ok
2.创建JMS服务器
--Services--Messaging--JMS Servers--new--name随便起--Pers
- 基于 DHT 网络的磁力链接和BT种子的搜索引擎架构
justjavac
DHT
上周开发了一个磁力链接和 BT 种子的搜索引擎 {Magnet & Torrent},本文简单介绍一下主要的系统功能和用到的技术。
系统包括几个独立的部分:
使用 Python 的 Scrapy 框架开发的网络爬虫,用来爬取磁力链接和种子;
使用 PHP CI 框架开发的简易网站;
搜索引擎目前直接使用的 MySQL,将来可以考虑使
- sql添加、删除表中的列
macroli
sql
添加没有默认值:alter table Test add BazaarType char(1)
有默认值的添加列:alter table Test add BazaarType char(1) default(0)
删除没有默认值的列:alter table Test drop COLUMN BazaarType
删除有默认值的列:先删除约束(默认值)alter table Test DRO
- PHP中二维数组的排序方法
abc123456789cba
排序二维数组PHP
<?php/*** @package BugFree* @version $Id: FunctionsMain.inc.php,v 1.32 2005/09/24 11:38:37 wwccss Exp $*** Sort an two-dimension array by some level
- hive优化之------控制hive任务中的map数和reduce数
superlxw1234
hivehive优化
一、 控制hive任务中的map数: 1. 通常情况下,作业会通过input的目录产生一个或者多个map任务。 主要的决定因素有: input的文件总个数,input的文件大小,集群设置的文件块大小(目前为128M, 可在hive中通过set dfs.block.size;命令查看到,该参数不能自定义修改);2.
- Spring Boot 1.2.4 发布
wiselyman
spring boot
Spring Boot 1.2.4已于6.4日发布,repo.spring.io and Maven Central可以下载(推荐使用maven或者gradle构建下载)。
这是一个维护版本,包含了一些修复small number of fixes,建议所有的用户升级。
Spring Boot 1.3的第一个里程碑版本将在几天后发布,包含许多