考研数据结构考点之排序
第八章 排序
-
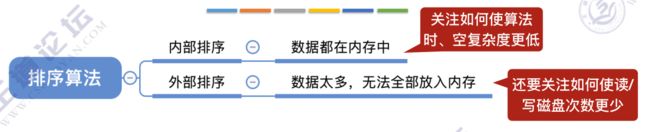
- 8.1 排序的基本概念
- 8.2 插入排序
-
- 8.2.1 直接插入排序
- 8.2.2 折半插入排序
- 8.2.3 希尔排序
- 8.3 交换排序
-
- 8.3.1 冒泡排序
- 8.3.2 快速排序
-
- 代码实现:
- 效率分析
- 8.4 选择排序
-
- 8.4.1 简单选择排序
- 8.4.2 堆排序
-
- 代码实现:
- 效率分析
- 拓展
- 8.5 归并排序和基数排序
-
- 8.5.1 归并排序(2路归并)
-
- 代码实现:
- 效率分析
- 8.5.2 基数排序
-
- 擅长解决的问题
- 效率分析
- 各种排序算法的性质
8.1 排序的基本概念
- 排序算法的评价指标
- 时间复杂度
- 空间复杂度
- 稳定性;是指两个值相等的关键字经过排序后相对位置是否发生变化,没有变化是稳定的,否则不稳定;
- 排序算法的分类
8.2 插入排序
8.2.1 直接插入排序
空间复杂度 O(1)
最好时间复杂度(全部有序) O(n)
最坏时间复杂度(全部逆序) O(n²)
平均时间复杂度 O(n²)
算法稳定性:稳定
适用性:顺序存储或链式存储都可以
在元素序列基本有序的前提下,效率还是很高的
8.2.2 折半插入排序
空间复杂度 O(1)
平均时间复杂度 O(n²)
算法稳定性:稳定
适用性:顺序存储结构
对于数据量不很大的排序表,折半插入排序往往能表现出很好的性能
8.2.3 希尔排序
希尔排序也被称为“缩小增量排序”
设置一个增量d,即相隔d个位置的元素为一个子表,先让每个子表的元素相对有序,然后让d逐渐减小为1;
希尔排序每趟并不产生有序区
空间复杂度 O(1)
最坏时间复杂度 O(n²) -----让增量d最初便等于1,相当于直接插入排序的最坏
平均时间复杂度 O(n1.3)------当n在某个范围内时,大约是…
算法稳定性:不稳定
适用性:仅适用于顺序存储结构的线性表
8.3 交换排序
8.3.1 冒泡排序
从后往前(或从前往后)两两比较相邻元素的值,若为逆序(A[j-1]>A[j]),则交换;最多只需n-1趟;
空间复杂度 O(1)
最好时间复杂度(全部有序) O(n)
最坏时间复杂度(全部逆序) O(n²)
- 元素全部逆序时,移动次数是比较次数的3倍;
- 因为每比较1次都会交换1次;每交换一次就会移动元素3次( temp=A[j]; A[j]=A[j-1]; A[j-1]=temp; )
- 即比较次数=n(n-1)/2;移动次数=3n(n-1)/2;
平均时间复杂度O(n²)
算法稳定性:稳定
适用性:顺序表、链表都可以
冒泡排序每一趟排序结束后产生的有序子序列一定是全局有序的
8.3.2 快速排序
代码实现:
int Partition(ElemType A[],int low,int high){
//pivot(支点、枢轴)
ElemType pivot=A[low];
while(low<high){
while(A[high]>=pivot&&low<high)
high--;
A[low]=A[high];
while(A[low]<=pivot&&low<high)
low++;
A[high]=A[low];
}
A[low]=pivot;
return low;
}
//初始low=0;high=n-1;
void QuickSort(ElemType A[],int low,int high){
if(low<high){
int pivotpos=Partition(A,low,high);
QuickSort(A,low,pivotpos-1);
QuickSort(A,pivotpos+1,high);
}
}
在快速排序过程中,并不产生有序子序列,但每次划分后会将枢轴(基准)元素放到其最终的位置上。
效率分析
时间复杂度 = O(n*递归层数)
空间复杂度 = O(递归层数)
递归层数相当于快速排序过程中形成的分析树(二叉排序树)的高度
即 最好情况下的递归层数 = 二叉排序树的最小高度 = log2(n+1) (向上取整)
最好情况下的递归层数 = 二叉排序树的最大高度 = n ;
故
| 时间复杂度 | 空间复杂度 | |
|---|---|---|
| 最好情况 | O(nlog2n) | O(log2n) |
| 最坏情况 | O(n²) | O(n) |
快速排序平均情况下的运行时间与其最好情况下的运行时间很接近,而不是接近其最坏情况下的运行时间;
故 平均时间复杂度=O(nlog2n) 平均空间复杂度O(log2n)
算法稳定性:不稳定
快速排序是所有内部排序算法中平均性能最优的排序算法
注:“一趟"排序 == ? 一次"划分” 要看报考大学历年真题中是如何处理的?
8.4 选择排序
8.4.1 简单选择排序
每次循环找出无序序列中最小的元素,与无序序列的第一个位置元素进行交换,然后无序序列的起始位置向后移,有序序列长度加一;
空间复杂度 O(1)
元素移动的次数很少,不会超过3(n-1),最好的情况是移动0次
元素间比较的次数与序列的初始状态无关,始终是n(n-1)/2,因此时间复杂度始终是O(n²)
最好时间复杂度 O(n²)
最坏时间复杂度 O(n²)
平均时间复杂度 O(n²)
算法稳定性:不稳定
适用性:顺序表、链表都可以
8.4.2 堆排序
代码实现:
typedef int ElemType;
void Swap(int &a,int &b){
int temp=a;
a=b;
b=temp;
}
//将以k为根的子树调整为大根堆
void HeadAdjust(ElemType A[],int k,int len){
A[0]=A[k];
for(int i=2*k;i<=len;i=i*2){
if(i<len&&A[i]<A[i+1])
i++;
if(A[i]<=A[0])
break;
else{
A[k]=A[i];
k=i;
}
}
A[k]=A[0];
}
//建立大根堆,最后排序完成,序列元素升序排列
void BuildMaxHeap(ElemType A[],int len){
for(int i=len/2;i>0;i--){
HeadAdjust(A,i,len); //从以最后一个非叶结点为根的子树开始调整
}
}
void HeapSort(ElemType A[],int len){
BuildMaxHeap(A,len);
for(int i=len;i>1;i--){
Swap(A[1],A[i]);
HeadAdjust(A,1,i-1);
//只需调整以第一个非叶结点为根的树即可,
//因为上面交换的那一步只是把根节点和最后一个结点交换了
//处最上层之外其他的子堆都还是满足大根堆的要求的
//所以只需把最上层出现的小元素不断"下坠"即可
}
}
效率分析
- 建堆的时间复杂度T1(n) = O(n)
- 每趟排序的时间复杂度=O(log2n) ; 一共需要排序(n-1)趟,故排序的时间复杂度T2(n) = O(nlog2n)
- 所以,堆排序总的时间复杂度= T1(n) + T2(n) = O(n) + O(nlog2n) = O(nlog2n) ;
- 空间复杂度 S(n) = O(1)
- 算法稳定性:不稳定
- 基于"大根堆"的堆排序得到递增序列,基于"小根堆"的堆排序得到递减序列
拓展
堆是用来排序的数据结构,排序时效率很高,但如果用来查找则是一种效率很低的数据结构,因为查找时堆是无序的,或者说不是严格有序,堆中只是保证了父节点的值一定大于或小于它的两个孩子而已。
8.5 归并排序和基数排序
8.5.1 归并排序(2路归并)
核心操作:把数组内的两个有序序列归并为一个
常用于外部排序
代码实现:
int *B=(int *)malloc(sizeof(int)*n); //辅助数组B
//A[low…mid]和A[mid+1…high]各自有序,将两个部分合并
void Merge(int A[],int low,int mid,int high){
int i,j,k;
for(i=low;i<=high;i++){
B[i]=A[i]; //将A中所有元素复制到B中
}
for(i=low,j=mid+1,k=low;i<=mid&&j<=high;k++){
if(B[i]<=B[j])
A[k]=B[i++]; //将较小值复制到A中
else
A[k]=B[j++];
}
while(i<=mid)
A[k++]=B[i++];
while(j<=high)
A[k++]=B[j++];
}
void MergeSort(int A[],int low,int high){
if(low<high){
int mid=(low+high)/2; //从中间划分
MergeSort(A,low,mid); //对左半部分排序
MergeSort(A,mid+1,high); //对右半部分排序
Merge(A,low,mid,high); //归并左右两个有序序列
}
}
效率分析
-
时间复杂度分析:
n个元素进行2路归并排序,归并趟数=log2n(向上取整)
每趟归并时间复杂度为O(n),则算法总的时间复杂度为O(nlog2n) -
空间复杂度:O(n) 来自辅助数组B
-
算法稳定性:稳定
8.5.2 基数排序
- 能手动模拟算法运行过程即可,不考察代码
- 不需要基于比较的排序
- 大多基于链式存储结构实现(建立链式队列)
- 为实现多关键字排序,通常有两种方法:
- 最高位优先(MSD) ----按关键字权重递减依次进行分配、收集
- 最低位优先(LSD) ----按关键字权重递增依次进行分配、收集
擅长解决的问题
①数据元素的关键字可以方便地拆分为d组,且d较小
②每组关键字的取值范围不大,即r很小
③数据元素个数n较大
效率分析
- 空间复杂度 = O® r是基数,代表每位关键字可以取值的个数,比如十进制数的r=10
- 一趟分配的时间复杂度=O(n),一趟收集O®,总共d趟分配、收集,总的时间复杂度=O(d(n+r))
- 算法稳定性:稳定
各种排序算法的性质
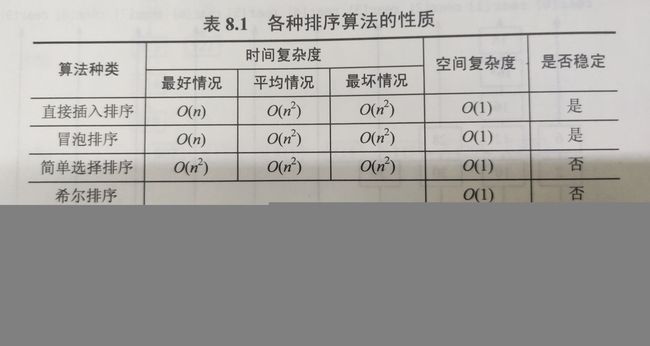
- 在最好的情况下,时间复杂度可以达到线性时间的有:冒泡排序、直接插入排序。