Matlab图像处理学习笔记(七):surf特征点
本文主要演示如何使用matlab自带的Computer Vision System Toolbox这个工具箱进行suft特征点的检测、匹配及显示。这个工具箱是matlab2012b及之后才有的一个工具箱,如果你的版本较低,建议你更新较新版本。
转载请注明出处:http://blog.csdn.net/u010278305点击打开链接
suft特征点是Speeded-Up Robust Features的简称,相比于sift特征点,速度更快。
本文涉及到的知识点如下:
1、suft特征点。
2、matlab的Computer Vision System Toolbox工具箱。
程序流程如下:
1、读取图像,转为灰度图。
2、寻找surf特征点。
3、根据特征点计算描述向量。
4、进行匹配。
5、绘制匹配结果。
matlab源代码如下:
%function:
% surf特征点检测与匹配
%注意:
% 本例程主要演示如何用matlab自带的Computer Vision System Toolbox进行surf特征点的提取与匹配
%date:2015-1-13
%author:chenyanan
%转载请注明出处:http://blog.csdn.net/u010278305
%清空变量,读取图像
clear;close all
%Read the two images.
I1= imread('images/girl.jpg');
I1=imresize(I1,0.5);
I1=rgb2gray(I1);
I2= imread('images/head.jpg');
I2=imresize(I2,0.5);
I2=rgb2gray(I2);
%Find the SURF features.寻找特征点
points1 = detectSURFFeatures(I1);
points2 = detectSURFFeatures(I2);
%Extract the features.计算描述向量
[f1, vpts1] = extractFeatures(I1, points1);
[f2, vpts2] = extractFeatures(I2, points2);
%Retrieve the locations of matched points. The SURF feature vectors are already normalized.
%进行匹配
indexPairs = matchFeatures(f1, f2, 'Prenormalized', true) ;
matched_pts1 = vpts1(indexPairs(:, 1));
matched_pts2 = vpts2(indexPairs(:, 2));
%Display the matching points. The data still includes several outliers,
%but you can see the effects of rotation and scaling on the display of matched features.
%对匹配结果进行显示,可以看到,还有一些异常值
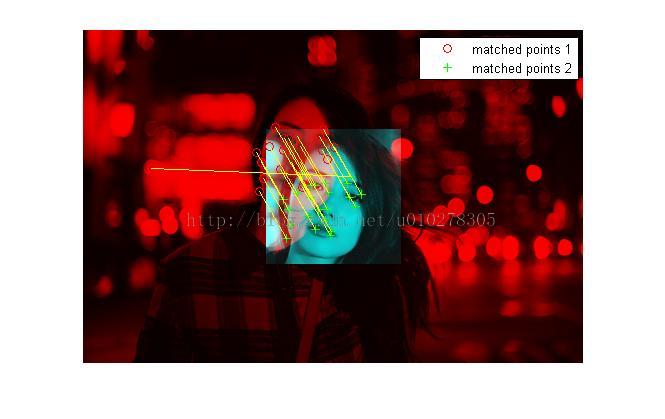
figure('name','result'); showMatchedFeatures(I1,I2,matched_pts1,matched_pts2);
legend('matched points 1','matched points 2');
程序运行效果如下:
测试原文件可在之前的笔记中找到。
转载请注明出处:http://blog.csdn.net/u010278305点击打开链接