在ubuntu22.04中借助docker实现安装、调试ros1.0
一.安装docker
参考:https://www.cnblogs.com/cqpanda/p/16247919.html
使用安装方法1直接安装,没出问题,我就继续了。出问题按方法2安装吧。
curl -fsSL https://get.docker.com | bash -s docker --mirror Aliyun二.docker中安装ros1.0(noetic)
1. 拉取ros1.0镜像
参考:docker容器中安装ROS1/ROS2(不用配任何环境,10分钟搞定)_docker ros2-CSDN博客
docker pull osrf/ros:noetic-desktop-full这时候可以编写dockerfile并执行,否则用原始镜像生成的容器缺乏基本的linux软件。
由于我编写的dockerfile怎么也执行不成功,所以使用了原始镜像,通过docker cp命令 把/etc/apt/sources.list源拷贝到容器内,实现基本软件的安装。
2. 安装ros1.0
参考:docker容器中安装ROS1/ROS2(不用配任何环境,10分钟搞定)_docker ros2-CSDN博客
生成新容器,主要注意映射关系与x11:
docker run -it \
--name your_name \
--env="DISPLAY" \
--env="QT_X11_NO_MITSHM=1" \
--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \
osrf/ros:noetic-desktop-full \
rqt
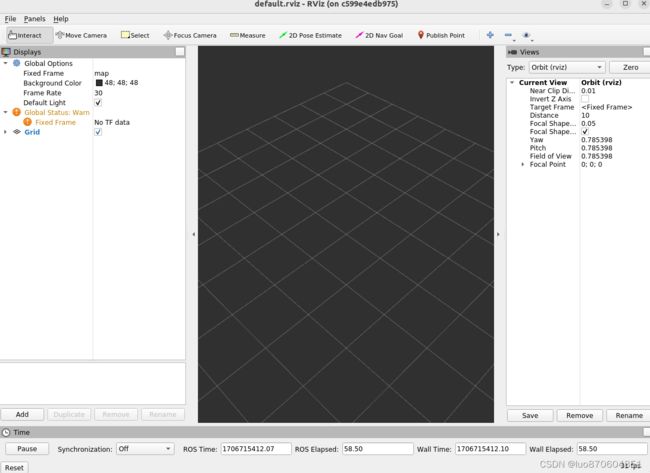
四.测试rviz是否可显示
先运行:
xhost +source /opt/ros/noetic/setup.bash
roscore,然后运行viz即可开启。
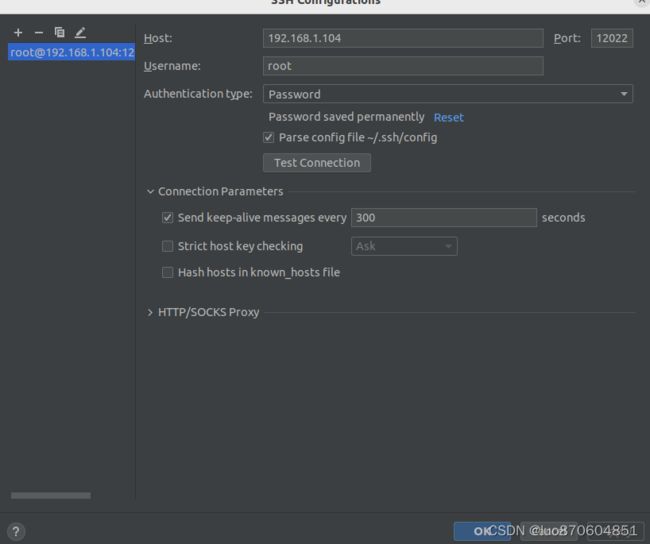
五.部署开发环境---clion连接docker
1. 安装ssh服务
sudo apt install openssh-server
2.启动服务
sudo service ssh start可以使用远程连接的Docker利用镜像产生新的容器。但我这里已经先生成容器了,所以使用remote_host来连接已有的容器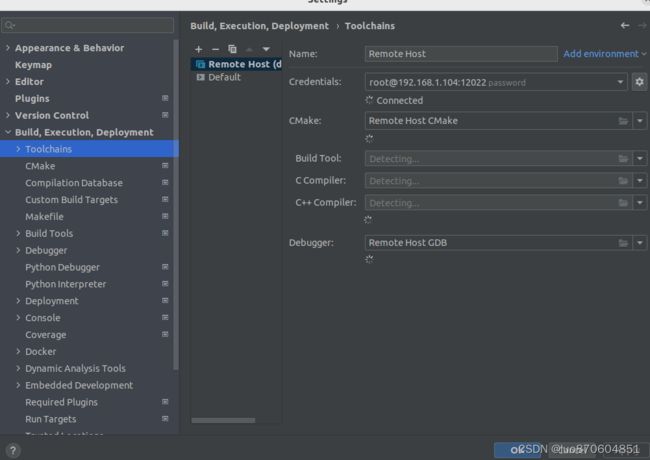
设置宿主机与容器内文件夹映射:

六.编译,调试代码
这里记录以下ttb库与g++9或g++10不兼容的一个bug,因为容器是g++9,把g++9升级到g++11就能解决。
parallel_backend_tbb.h:70:10: error: 'tbb::task' has not been declared
把ros的环境变量配置到clion中去:
查看ros的环境变量,容器终端内执行:
ros_env="AMENT_PREFIX_PATH CMAKE_PREFIX_PATH COLCON_PREFIX_PATH PKG_CONFIG_PATH PYTHONPATH LD_LIBRARY_PATH PATH ROS_DISTRO ROS_PYTHON_VERSION ROS_LOCALHOST_ONLY ROS_VERSION"
env_string=""
for e in ${ros_env}; do
env_string+="$e=${!e};"
done
echo "$env_string"生成:
AMENT_PREFIX_PATH=;CMAKE_PREFIX_PATH=/opt/ros/noetic;COLCON_PREFIX_PATH=;PKG_CONFIG_PATH=/opt/ros/noetic/lib/pkgconfig;PYTHONPATH=/opt/ros/noetic/lib/python3/dist-packages;LD_LIBRARY_PATH=/opt/ros/noetic/lib;PATH=/opt/ros/noetic/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin;ROS_DISTRO=noetic;ROS_PYTHON_VERSION=3;ROS_LOCALHOST_ONLY=;ROS_VERSION=1;把这段生成的环境变量防到clion的环境命令中去:
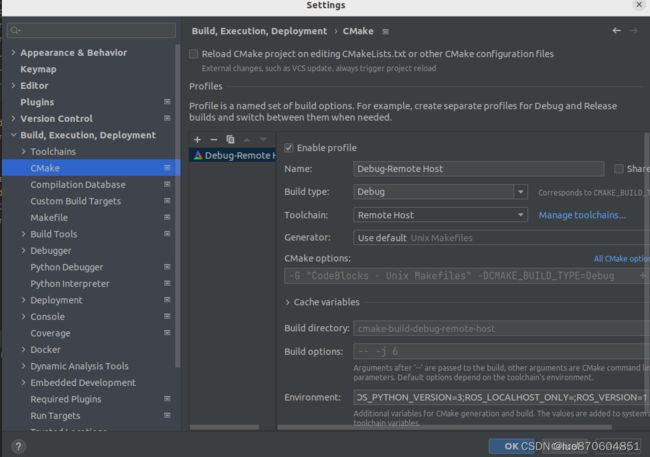
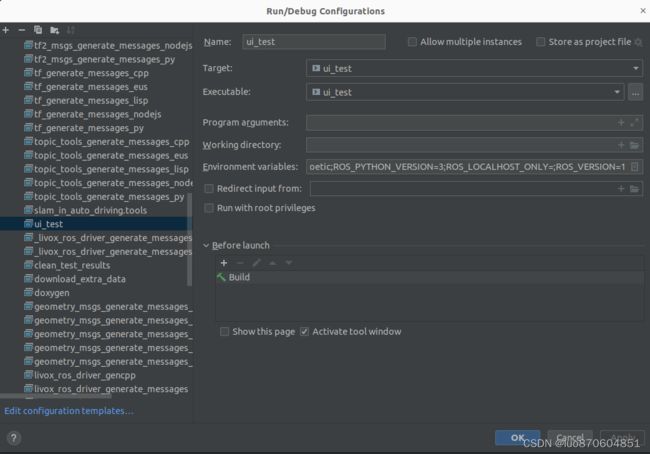
即可开始编译,调试了。
七.遗留问题
在clion中执行可视化节点的时候,会报错:
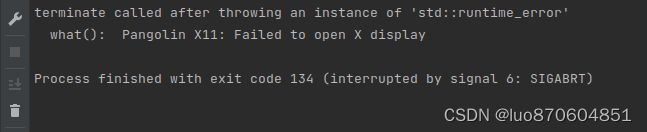
但,如果在容器终端内启动节点,则正常打开可视化页面。看起来xhost +并未对clion生效。欢迎留言帮助解决。