Qt PCL学习(三):点云滤波
注意事项
- 版本一览:Qt 5.15.2 + PCL 1.12.1 + VTK 9.1.0
- 前置内容:Qt PCL学习(一):环境搭建、Qt PCL学习(二):点云读取与保存
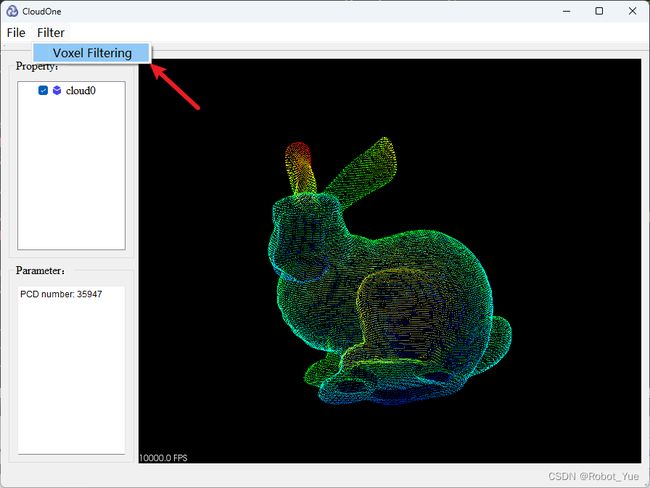
0. 效果演示

1. pcl_open_save.pro
QT += core gui
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
// 添加下行代码(根据自己安装目录进行修改)
include(D:/PCL1.12.1/pcl1.12.1.pri)
2. mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include 3. mainwindow.cpp
#pragma execution_character_set("utf-8")
#include "mainwindow.h"
#include "ui_mainwindow.h"
MainWindow::MainWindow(QWidget *parent) : QMainWindow(parent), ui(new Ui::MainWindow) {
ui->setupUi(this);
// 设置窗口标题和 logo
this->setWindowTitle("CloudOne");
this->setWindowIcon(QIcon(":/resourse/icon.ico"));
m_publicIconMap[TREE_ITEM_ICON_DataItem] = QIcon(QStringLiteral(":/resourse/folder.png"));
model = new QStandardItemModel(ui->treeView);
model->setHorizontalHeaderLabels(QStringList()<<QStringLiteral("--cloud--DB-Tree--"));
ui->treeView->setHeaderHidden(true);
ui->treeView->setModel(model);
ui->treeView->setSelectionMode(QAbstractItemView::ExtendedSelection); // 设置多选
cloudptr.reset(new PointCloudT);
cloud_viewer.reset(new pcl::visualization::PCLVisualizer("viewer", false));
vtkNew<vtkGenericOpenGLRenderWindow> window;
window->AddRenderer(cloud_viewer->getRendererCollection()->GetFirstRenderer());
ui->openGLWidget->setRenderWindow(window.Get());
cloud_viewer->setupInteractor(ui->openGLWidget->interactor(), ui->openGLWidget->renderWindow());
ui->openGLWidget->update();
// 创建菜单栏
QMenuBar *menu_bar = new QMenuBar(this);
this->setMenuBar(menu_bar);
menu_bar->setStyleSheet("font-size : 16px");
// 1、File 下拉列表
QMenu *file_menu = new QMenu("File", menu_bar);
QAction *open_action = new QAction("Open File");
QAction *save_action = new QAction("Save File");
QAction *exit_action = new QAction("Exit");
// 添加动作到文件菜单
file_menu->addAction(open_action);
file_menu->addAction(save_action);
file_menu->addSeparator(); // 添加菜单分隔符将 exit 单独隔离开
file_menu->addAction(exit_action);
// 把 File 添加到菜单栏
menu_bar->addMenu(file_menu);
// 2、Filter 下拉列表
QMenu *filter_menu = new QMenu("Filter", menu_bar);
QAction *voxel_action = new QAction("Voxel Filtering");
filter_menu->addAction(voxel_action);
menu_bar->addMenu(filter_menu);
// 信号与槽函数链接
connect(open_action, SIGNAL(triggered()), this, SLOT(open_clicked())); // 打开文件
connect(save_action, SIGNAL(triggered()), this, SLOT(save_clicked())); // 保存文件
connect(exit_action, SIGNAL(triggered()), this, SLOT(close())); // 退出
connect(voxel_action, SIGNAL(triggered()), this, SLOT(pressBtn_voxel()));
}
MainWindow::~MainWindow() {
delete ui;
}
PointCloudT::Ptr MainWindow::pcl_voxel_filter(PointCloudT::Ptr cloud_in, float leaf_size) {
pcl::VoxelGrid<PointT> voxel_grid;
voxel_grid.setLeafSize(leaf_size, leaf_size, leaf_size);
voxel_grid.setInputCloud(cloud_in);
PointCloudT::Ptr cloud_out (new PointCloudT()) ;
voxel_grid.filter(*cloud_out);
return cloud_out;
}
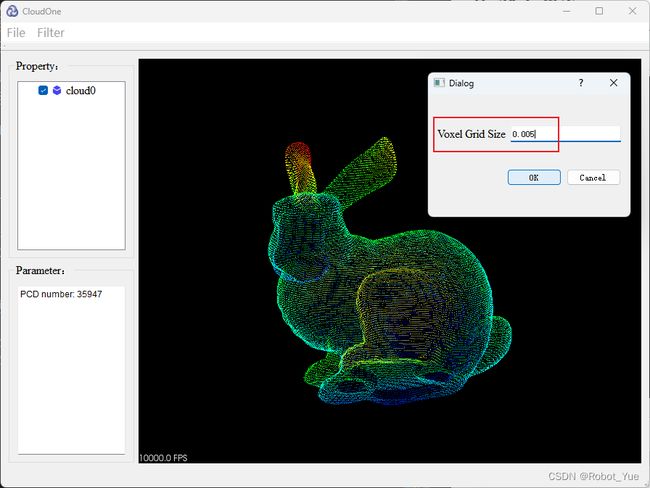
void MainWindow::pressBtn_voxel() {
dialog_voxel = new voxel_filtering();
connect(dialog_voxel, SIGNAL(sendData(QString)), this, SLOT(voxel_clicked(QString)));
if (dialog_voxel->exec() == QDialog::Accepted){}
delete dialog_voxel;
}
// 体素采样
void MainWindow::voxel_clicked(QString data) {
if (cloudptr->empty()) {
QMessageBox::warning(this, "Warning", "None point cloud!");
return;
} else {
if (data.isEmpty()) {
QMessageBox::warning(this, "Warning", "Wrong format!");
return;
}
float size = data.toFloat();
auto cloud_out = pcl_voxel_filter(cloudptr, size);
cloudptr = cloud_out;
int size1 = static_cast<int>(cloudptr->size());
QString PointSize = QString("%1").arg(size1);
ui->textBrowser_2->clear();
ui->textBrowser_2->insertPlainText("PCD number: " + PointSize);
ui->textBrowser_2->setFont(QFont("Arial", 9, QFont::Normal));
cloud_viewer->removeAllPointClouds();
cloud_viewer->removeAllShapes();
cloud_viewer->addPointCloud<pcl::PointXYZ>(cloudptr->makeShared(), std::to_string(cloud_vec.size()-1));
cloud_viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, point_size, std::to_string(cloud_vec.size()-1));
cloud_viewer->resetCamera();
// 设置颜色处理器,将点云数据添加到 cloud_viewer 中
const std::string axis = "z";
pcl::visualization::PointCloudColorHandlerGenericField<PointT> color_handler(cloudptr, axis);
cloud_viewer->addPointCloud(cloudptr, color_handler, "cloud");
cloud_viewer->addPointCloud(cloudptr, "cloud");
}
}
void MainWindow::open_clicked() {
// this:代表当前对话框的父对象;tr("open file"):作为对话框的标题显示在标题栏中,使用 tr 函数表示这是一个需要翻译的文本
// "":代表对话框的初始目录,这里为空表示没有指定初始目录
// tr("pcb files(*.pcd *.ply *.txt) ;;All files (*.*)"):过滤器,决定在对话框中只能选择指定类型的文件
QString fileName = QFileDialog::getOpenFileName(this, tr("open file"), "", tr("point cloud files(*.pcd *.ply) ;; All files (*.*)"));
if (fileName.isEmpty()) {
return;
}
if (fileName.endsWith("ply")) {
qDebug() << fileName;
if (pcl::io::loadPLYFile(fileName.toStdString(), *cloudptr) == -1) {
qDebug() << "Couldn't read .ply file \n";
return ;
}
} else if (fileName.endsWith("pcd")) {
qDebug() << fileName;
if (pcl::io::loadPCDFile(fileName.toStdString(), *cloudptr) == -1) {
qDebug() << "Couldn't read .pcd file \n";
return;
}
} else {
QMessageBox::warning(this, "Warning", "Wrong format!");
}
cloud_vec.push_back(cloudptr->makeShared());
cloud_index.push_back(1);
itemFolder = new QStandardItem(m_publicIconMap[QStringLiteral("treeItem_folder")], QStringLiteral("cloud%1").arg(cloud_vec.size()-1));
itemFolder->setCheckable(true);
itemFolder->setCheckState(Qt::Checked); // 获取选中状态
model->appendRow(itemFolder);
int size = static_cast<int>(cloudptr->size());
QString PointSize = QString("%1").arg(size);
ui->textBrowser_2->clear();
ui->textBrowser_2->insertPlainText("PCD number: " + PointSize);
ui->textBrowser_2->setFont(QFont("Arial", 9, QFont::Normal));
cloud_viewer->addPointCloud<pcl::PointXYZ>(cloudptr->makeShared(), std::to_string(cloud_vec.size()-1));
// 设置点云大小
cloud_viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, point_size, std::to_string(cloud_vec.size()-1));
cloud_viewer->resetCamera();
ui->openGLWidget->renderWindow()->Render();
ui->openGLWidget->update();
// 设置颜色处理器,将点云数据添加到 cloud_viewer 中
const std::string axis = "z";
pcl::visualization::PointCloudColorHandlerGenericField<PointT> color_handler(cloudptr, axis);
cloud_viewer->addPointCloud(cloudptr, color_handler, "cloud");
cloud_viewer->addPointCloud(cloudptr, "cloud");
}
void MainWindow::save_clicked() {
int return_status;
QString filename = QFileDialog::getSaveFileName(this, tr("Open point cloud"), "", tr("Point cloud data (*.pcd *.ply)"));
if (cloudptr->empty()) {
return;
} else {
if (filename.isEmpty()) {
return;
}
if (filename.endsWith(".pcd", Qt::CaseInsensitive)) {
return_status = pcl::io::savePCDFileBinary(filename.toStdString(), *cloudptr);
} else if (filename.endsWith(".ply", Qt::CaseInsensitive)) {
return_status = pcl::io::savePLYFileBinary(filename.toStdString(), *cloudptr);
} else {
filename.append(".ply");
return_status = pcl::io::savePLYFileBinary(filename.toStdString(), *cloudptr);
}
if (return_status != 0) {
PCL_ERROR("Error writing point cloud %s\n", filename.toStdString().c_str());
return;
}
}
}
void MainWindow::view_updata(std::vector<PointCloudT::Ptr> vector_cloud, std::vector<int> index) {
cloud_viewer.reset(new pcl::visualization::PCLVisualizer("viewer", false));
vtkNew<vtkGenericOpenGLRenderWindow> window;
window->AddRenderer(cloud_viewer->getRendererCollection()->GetFirstRenderer());
ui->openGLWidget->setRenderWindow(window.Get());
cloud_viewer->removeAllPointClouds();
cloud_viewer->removeAllShapes();
for (int i = 0; i<vector_cloud.size(); i++) {
if (index[i] == 1) {
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ>render(vector_cloud[i], "intensity");
cloud_viewer->addPointCloud<pcl::PointXYZ>(vector_cloud[i], render, std::to_string(i));
cloud_viewer->setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, point_size, std::to_string(i));
}
}
cloud_viewer->resetCamera();
ui->openGLWidget->update();
}
// 确定 index
void MainWindow::on_treeView_clicked(const QModelIndex &index) {
QStandardItem* item = model->itemFromIndex(index);
// 点云数量更改
QStandardItemModel* model = static_cast<QStandardItemModel*>(ui->treeView->model());
QModelIndex index_temp = ui->treeView->currentIndex();
int size = static_cast<int>(cloud_vec[index_temp.row()]->size());
QString PointSize = QString("%1").arg(size);
ui->textBrowser_2->clear();
ui->textBrowser_2->insertPlainText("Point cloud number: " + PointSize);
ui->textBrowser_2->setFont(QFont("Arial", 9, QFont::Normal));
// 可视化更改
if (item == nullptr)
return;
if (item->isCheckable()) {
//判断状态
Qt::CheckState state = item->checkState(); // 获取当前的选择状态
if (Qt::Checked == state) {
cloud_index[index.row()] = 1;
}
if (Qt::Unchecked == state) {
cloud_index[index.row()] = 0;
}
view_updata(cloud_vec, cloud_index);
}
}
4. voxel_filtering.h
#ifndef VOXEL_FILTERING_H
#define VOXEL_FILTERING_H
#include 5. voxel_filtering.cpp
#include "voxel_filtering.h"
#include "ui_voxel_filtering.h"
voxel_filtering::voxel_filtering(QWidget *parent) : QDialog(parent), ui(new Ui::voxel_filtering) {
ui->setupUi(this);
}
voxel_filtering::~voxel_filtering() {
delete ui;
}
void voxel_filtering::on_buttonBox_accepted() {
emit sendData(ui->lineEdit->text());
this->close();
}