LV.23 D3 STM32 GPIO口操作平台介绍 学习笔记
一、GPIO的基本概念及寄存器介绍
1.1 GPIO接口简介
通用输入输出接口GPIO是嵌入式系统、单片机开发过程中最常用的接口,用户可以通过编程灵活的对接口进行控制,实现对电路板上LED、数码管、按键等常用设备控制驱动,也可以作为串口的数据收发管脚,或AD的接口等复用功能使用。因此其作用和功能是非常重要的。

GPIO引脚如果是输入模式,就可以感知这条线路的高低电平变化,从而判断按键是按下还是抬起
GPIO引脚如果是输出模式,就可以向这条线路发送高低电平,从而使LED灯点亮或熄灭。

1.2 GPIO功能复用
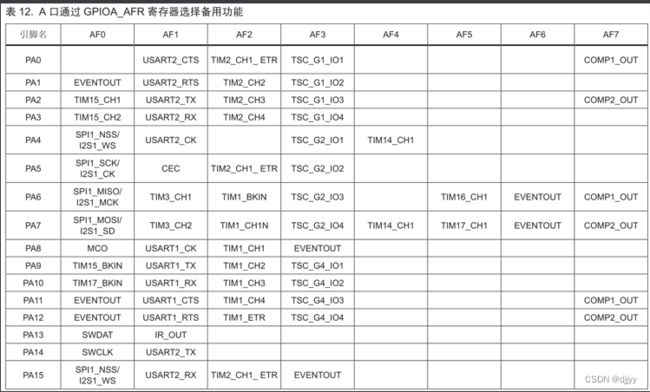
注:查看 《 STM32F0数据手册》
1.3 GPIO寄存器介绍
STM32F051-GPIO常用寄存器
4个32位配置寄存器
GPIOx_MODER, GPIOx_OTYPER, GPIOx_OSPEEDR GPIOx_PUPDR
2个32位数据寄存器
GPIOx_IDR 、GPIOx_ODR
1 个32 位置位 / 复位寄存器
GPIOx_BSRR
2 个 32 位复用功能配置寄存器
GPIOx_AFRH 、GPIOx_AFRL
注:每一组GPIO端口都有一套上述的寄存器去配置它自己的功能
GPIO寄存器MODER
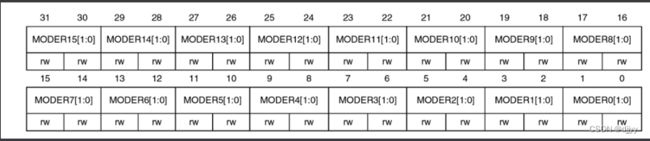

GPIO 端口模式寄存器 (GPIOx_MODER) (x = A..D,F)
偏移地址: 0x00
复位值:
● 0x2800 0000 端口 A
● 0x0000 0000 其他口
GPIO寄存器OTYPER

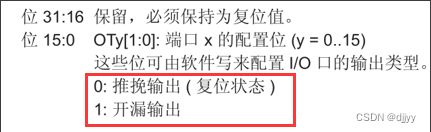
GPIO 端口输出类型寄存器 (GPIOx_OTYPER) (x = A..D,F)
偏移地址: 0x04
复位值: 0x0000 0000

设置为推挽输出时,P-MOS和N-MOS都可以工作,就可以输出高低电平。
设置为开漏输出时,只有N-MOS工作,只能输出低电平
GPIO寄存器OSPEEDR


GPIO 口输出速度寄存器 (GPIOx_OSPEEDR) (x = A..D,F)
偏移地址: 0x08
复位值: 0x0000 0000
GPIO寄存器PUPDR


如果配置为上拉,默认情况下就输出高电平,如果配置为下拉,默认情况下就输出低电平。
GPIO 口上拉 / 下拉寄存器 (GPIOx_PUPDR) (x = A..D,F)
偏移地址: 0x0C
复位值: ● 0x2400 0000 端口 A ● 0x0000 0000 其它端口
GPIO寄存器IDR


GPIO 端口输入数据寄存器 (GPIOx_IDR) (x = A..D,F)
偏移地址: 0x10
复位值: 0x0000 XXXX (X 表明不定 )
GPIO寄存器ODR


GPIO 端口输出数据寄存器 (GPIOx_ODR) (x = A..D,F)
偏移地址: 0x14
复位值: 0x0000 0000
GPIO寄存器BSRR


GPIO 端口置位 / 复位寄存器 (GPIOx_BSRR) (x = A..D,F)
偏移地址: 0x18
复位值: 0x0000 0000
GPIO寄存器AFRL


GPIO 复用功能低位寄存器 (GPIOx_AFRL) (x = A..B)
偏移地址: 0x20
复位值: 0x0000 0000
GPIO寄存器AFRH


GPIO 复用功能低位寄存器 (GPIOx_AFRH) (x = A..B)
偏移地址: 0x24
复位值: 0x0000 0000
二、照亮电子世界的那盏灯——LED寄存器版
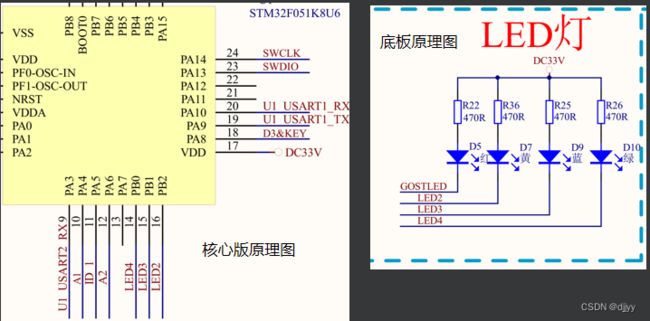
2.1 硬件原理图分析
使能GPIO的时钟

AHB 外部时钟使能寄存器 (RCC_AHBENR)
偏移地址 : 0x14
复位值 : 0x0000 0014
访问:无等待周期,字,半字和字节访问
2.2 编程步骤分析
开启GPIOB的时钟
RCC->AHBENR |= 1<<18;
配置PB0 PB1 PB2接口
GPIOB->MODER |= (1<<0)|(1<<2)|(1<<4); //设置PB0, PB1, PB2为通用输出模式
GPIOB->OTYPER = 0x0; //设置PB0, PB1, PB2为通用推挽输出
GPIOB->OSPEEDR = 0x0; //设置输出速度为低速
控制LED;
GPIOB->BSRR = (1<<16)|(1<<17)|(1<<18); //复位PB0, PB1, PB2 既点亮LED
GPIOB->BSRR = (1<<0)|(1<<1)|(1<<2); //置位PB0, PB1, PB2 既熄灭LED2.3 编程实例操作
1、先写一个初始化函数

2、在main函数中调用初始化函数

3、控制LED灯

4、连接开发板,点击编译,再点击下载。按下开发板上的复位键,即可看到LED灯闪烁。
三、照亮电子世界的那盏灯——LED库函数版
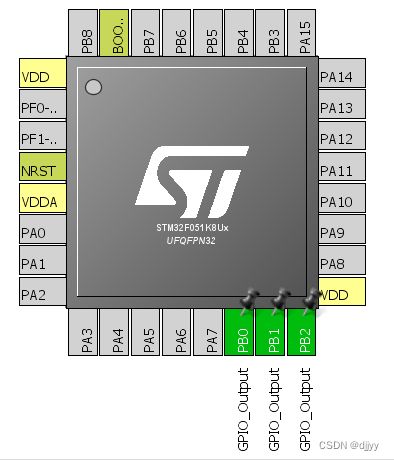
3.1 硬件原理图分析

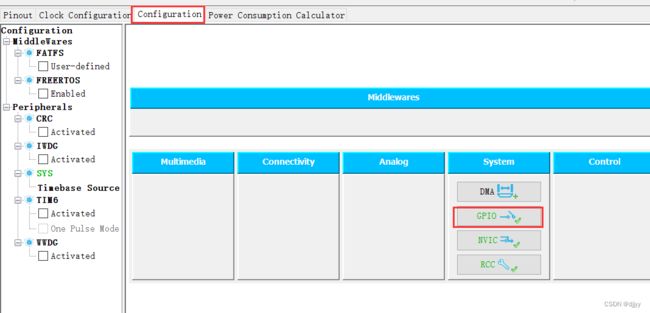
3.2 CubeMX配置

3.3 初始化关键代码分析
GPIOB初始化
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB的时钟
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2; //初始化对象为0, 1, 2号管脚
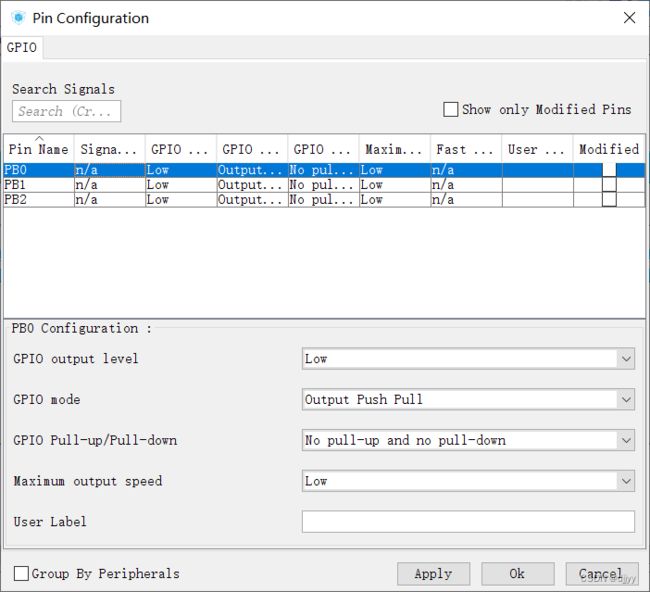
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; //模式为推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL; //没有上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; //低速
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); //配置好后开始初始化
}
复位PB0, PB1, PB2 既点亮LED
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2, GPIO_PIN_RESET);
置位PB0, PB1, PB2 既熄灭LED
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2, GPIO_PIN_SET);
3.4编程实例操作
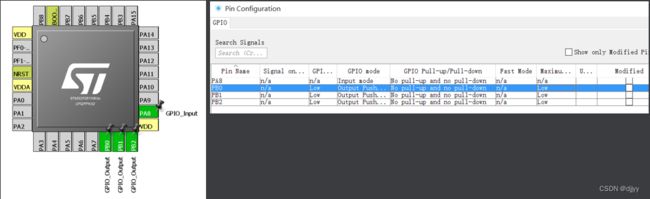
1、把相应的管脚选择为GPIO_Output功能

2、点击GPIO图标后,可以进行更详细的配置
3、点击导出,再点击Open Project打开工程,再在main函数中调用HAL_GPIO_WritePin函数

四、初识人机交互——按键
4.1 硬件原理图分析
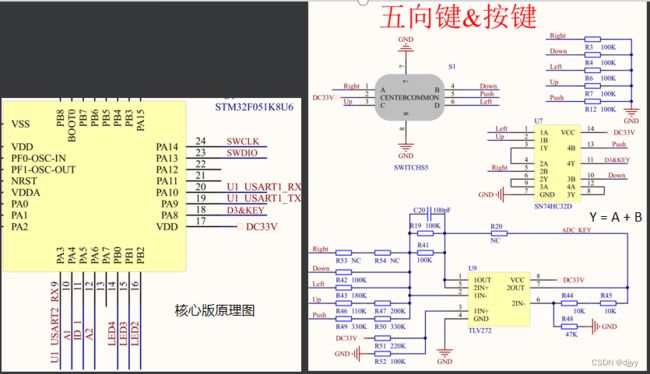
五向键的五个按键默认是接地的, 是低电平状态,按下后,会产生高电平
从图中可以看出,五向键连接到核心板的PA8
4.2CubeMX配置

本次实验使用五向键
4.3编程实例操作
要求:按下按键灯的状态会进行翻转
1、把PB0、PB1、PB2管脚设置为输出,PA8管脚设置为输入

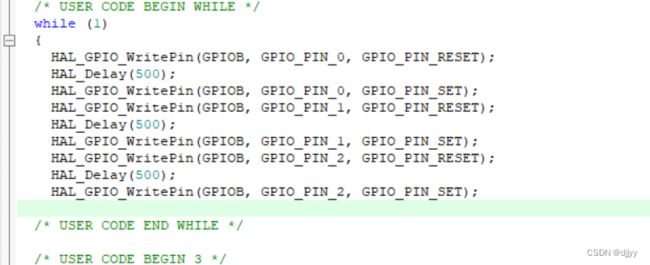
2、打开工程文件,在main.c文件的main函数中输入:
while (1)
{
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_8) == GPIO_PIN_SET)
{
while(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_8) == GPIO_PIN_SET); //等待按键抬起
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2); //翻转LED灯
}3、编译、下载到开发板
五、作业
编程实现STM32流水灯