opencv学习_9 (轮廓提取)
轮廓提取——主要针对二值图像
<1> 轮廓分为外轮廓和内轮廓 如下图:外轮廓以c开头 内轮廓以h开头

<2> opencv 提供了寻找轮廓的函数 inttotals = cvFindContours(img, storage,&contours,sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_NONE,cvPoint(0,0));
其中img是二值图像, storage是内存存储序列, contours指向存储的第一个轮廓,
CvMemStorage *storage =cvCreateMemStorage(0); //内存存储序列
CvSeq *contours = 0; //指向storage中的序列
CV_RETR_LIST表明轮廓在内存中的排列方式,有以下四种:
轮廓的排列方式<在内存中>
CV_RETR_EXTERNAL:first = c0
CV_RETR_CCOMP:从里到外 从右到左 这是一个双向链表
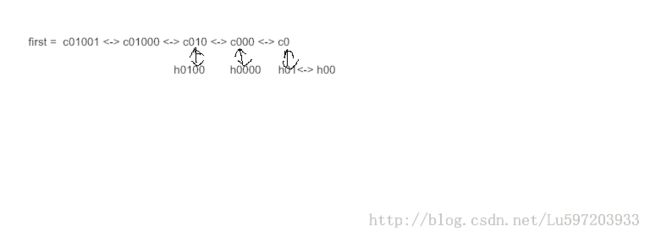
CV_RETR_LIST:
first = c01001 <–> c01000 <–>h0100 <–> h0000 <–> h0100 <–> h0000 <–> c010 <–>c000 <–> h01 <–> h00 <–> c0 这也是双向链表
CV_RETR_TREE :
<3>案例
结果展示: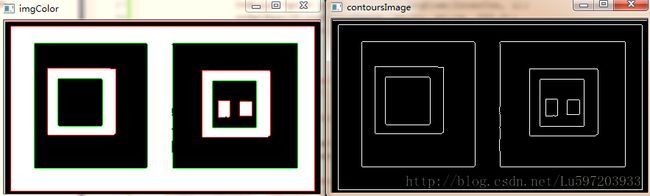
代码:
#include <iostream>
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
using namespace std;
int main()
{
CvMemStorage *storage = cvCreateMemStorage(0); // 内存存储序列
IplImage *img = cvLoadImage("E:\\study_opencv_video\\lesson14_1\\Debug\\55.png", 0);
IplImage *imgColor = cvCreateImage(cvGetSize(img), 8, 3);
IplImage *contoursImage = cvCreateImage(cvGetSize(img), 8, 1);
CvSeq *contours = 0, *contoursTemp = 0;
cvZero(contoursImage);
cvThreshold(img, img, 100, 255, CV_THRESH_BINARY); // 二值化操作
cvCvtColor(img, imgColor, CV_GRAY2BGR);
int totals = cvFindContours(img, storage,&contours, sizeof(CvContour), //img必须是一个二值图像 storage 用来存储的contours指向存储的第一个轮廓
CV_RETR_CCOMP, CV_CHAIN_APPROX_NONE, cvPoint(0,0));
contoursTemp = contours;
int count = 0;
int i;
for(;contoursTemp != 0; contoursTemp = contoursTemp -> h_next) /// 这样可以访问每一个轮廓 ====横向轮廓
{
for(i = 0; i < contoursTemp -> total; i++) // 提取一个轮廓的所有坐标点
{
CvPoint *pt = (CvPoint*) cvGetSeqElem(contoursTemp, i); // 得到一个轮廓中一个点的函数cvGetSeqElem
cvSetReal2D(contoursImage, pt->y, pt->x, 255.0);
cvSet2D(imgColor, pt->y, pt->x, cvScalar(0,0,255,0));
}
count ++;
CvSeq *InterCon = contoursTemp->v_next; // 访问每个轮廓的纵向轮廓
for(; InterCon != 0; InterCon = InterCon ->h_next)
{
for(i = 0; i < InterCon->total; i++ )
{
CvPoint *pt = (CvPoint*)cvGetSeqElem(InterCon, i);
cvSetReal2D(contoursImage, pt->y, pt->x, 255.0);
cvSet2D(imgColor, pt->y, pt->x, cvScalar(0, 255, 0, 0));
}
}
}
cvNamedWindow("contoursImage");
cvShowImage("contoursImage", contoursImage);
cvNamedWindow("imgColor");
cvShowImage("imgColor",imgColor);
cvWaitKey(0);
cvReleaseMemStorage(&storage); // 也要释放内存序列空间
cvReleaseImage(&contoursImage);
cvReleaseImage(&imgColor);
cvDestroyWindow("contoursImage");
cvDestroyWindow("imgColor");
return 0;}
作者:小村长 出处:http://blog.csdn.net/lu597203933 欢迎转载或分享,但请务必声明文章出处。 (新浪微博:小村长zack, 欢迎交流!)