【OpenCV】高斯混合背景建模
OpenCV中实现了两个版本的高斯混合背景/前景分割方法(Gaussian Mixture-based Background/Foreground Segmentation Algorithm)[1-2],调用接口很明朗,效果也很好。
BackgroundSubtractorMOG 使用示例
int main(){
VideoCapture video("1.avi");
Mat frame,mask,thresholdImage, output;
video>>frame;
BackgroundSubtractorMOG bgSubtractor(20,10,0.5,false);
while(true){
video>>frame;
++frameNum;
bgSubtractor(frame,mask,0.001);
imshow("mask",mask);
waitKey(10);
}
return 0;
}
构造函数可以使用默认构造函数或带形参的构造函数:
BackgroundSubtractorMOG::BackgroundSubtractorMOG() BackgroundSubtractorMOG::BackgroundSubtractorMOG(int history, int nmixtures, double backgroundRatio, double noiseSigma=0)其中history为使用历史帧的数目,nmixtures为混合高斯数量,backgroundRatio为背景比例,noiseSigma为噪声权重。
而调用的接口只有重载操作符():
void BackgroundSubtractorMOG::operator()(InputArray image, OutputArray fgmask, double learningRate=0)其中image为当前帧图像,fgmask为输出的前景mask,learningRate为背景学习速率。
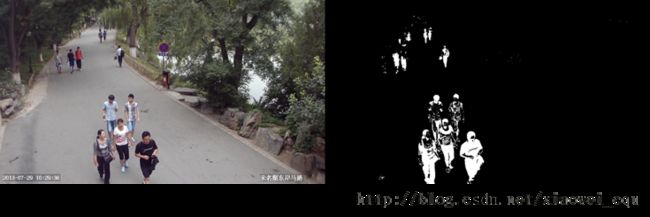
以下是使用BackgroundSubtractorMOG进行前景/背景检测的一个截图。
BackgroundSubtractorMOG2 使用示例
int main(){
VideoCapture video("1.avi");
Mat frame,mask,thresholdImage, output;
//video>>frame;
BackgroundSubtractorMOG2 bgSubtractor(20,16,true);
while(true){
video>>frame;
++frameNum;
bgSubtractor(frame,mask,0.001);
cout<<frameNum<<endl;
//imshow("mask",mask);
//waitKey(10);
}
return 0;
}
同样的,构造函数可以使用默认构造函数和带形参的构造函数
BackgroundSubtractorMOG2::BackgroundSubtractorMOG2() BackgroundSubtractorMOG2::BackgroundSubtractorMOG2(int history, float varThreshold, bool bShadowDetection=true )history同上,varThreshold表示马氏平方距离上使用的来判断是否为背景的阈值(此值不影响背景更新速率),bShadowDetection表示是否使用阴影检测(如果开启阴影检测,则mask中使用127表示阴影)。
使用重载操作符()调用每帧检测函数:
void BackgroundSubtractorMOG2::operator()(InputArray image, OutputArray fgmask, double learningRate=-1)参数意义同BackgroundSubtractorMOG中的operator()函数。
同时BackgroundSubtractorMOG2提供了getBackgroundImage()函数用以返回背景图像:
void BackgroundSubtractorMOG2::getBackgroundImage(OutputArray backgroundImage)
另外OpenCV的refman中说新建对象以后还有其他和模型油有关的参数可以修改,不过比较坑的是opencv把这个这些函数参数声明为protected,同时没有提供访问接口,所以要修改的话还是要自己修改源文件提供访问接口。
protected:
Size frameSize;
int frameType;
Mat bgmodel;
Mat bgmodelUsedModes;//keep track of number of modes per pixel
int nframes;
int history;
int nmixtures;
//! here it is the maximum allowed number of mixture components.
//! Actual number is determined dynamically per pixel
double varThreshold;
// threshold on the squared Mahalanobis distance to decide if it is well described
// by the background model or not. Related to Cthr from the paper.
// This does not influence the update of the background. A typical value could be 4 sigma
// and that is varThreshold=4*4=16; Corresponds to Tb in the paper.
/////////////////////////
// less important parameters - things you might change but be carefull
////////////////////////
float backgroundRatio;
// corresponds to fTB=1-cf from the paper
// TB - threshold when the component becomes significant enough to be included into
// the background model. It is the TB=1-cf from the paper. So I use cf=0.1 => TB=0.
// For alpha=0.001 it means that the mode should exist for approximately 105 frames before
// it is considered foreground
// float noiseSigma;
float varThresholdGen;
//correspondts to Tg - threshold on the squared Mahalan. dist. to decide
//when a sample is close to the existing components. If it is not close
//to any a new component will be generated. I use 3 sigma => Tg=3*3=9.
//Smaller Tg leads to more generated components and higher Tg might make
//lead to small number of components but they can grow too large
float fVarInit;
float fVarMin;
float fVarMax;
//initial variance for the newly generated components.
//It will will influence the speed of adaptation. A good guess should be made.
//A simple way is to estimate the typical standard deviation from the images.
//I used here 10 as a reasonable value
// min and max can be used to further control the variance
float fCT;//CT - complexity reduction prior
//this is related to the number of samples needed to accept that a component
//actually exists. We use CT=0.05 of all the samples. By setting CT=0 you get
//the standard Stauffer&Grimson algorithm (maybe not exact but very similar)
//shadow detection parameters
bool bShadowDetection;//default 1 - do shadow detection
unsigned char nShadowDetection;//do shadow detection - insert this value as the detection result - 127 default value
float fTau;
// Tau - shadow threshold. The shadow is detected if the pixel is darker
//version of the background. Tau is a threshold on how much darker the shadow can be.
//Tau= 0.5 means that if pixel is more than 2 times darker then it is not shadow
//See: Prati,Mikic,Trivedi,Cucchiarra,"Detecting Moving Shadows...",IEEE PAMI,2003.
以下是使用BackgroundSubtractorMOG2检测的前景和背景:

参考文献:
[1] KaewTraKulPong, Pakorn, and Richard Bowden. "An improved adaptive background mixture model for real-time tracking with shadow detection." Video-Based Surveillance Systems. Springer US, 2002. 135-144.
[2] Zivkovic, Zoran. "Improved adaptive Gaussian mixture model for background subtraction." Pattern Recognition, 2004. ICPR 2004. Proceedings of the 17th International Conference on. Vol. 2. IEEE, 2004.