registerListener流程
registerListener用来注册要监听的sensor,在Android应用中,我们是这么使用来注册一个需要监听的sensor的
registerListener(this, tp,SensorManager.SENSOR_DELAY_FASTEST);
第一个是一个实现了SensorEventListener 接口的类,当有数据到来时会调用onSensorChanged 方法,tp是我们获取到的需要注册的sensor,,第三个是需要的反应速率
我们来看一下registerListener在整个流程中怎么实现的
我们先看一下流程图:
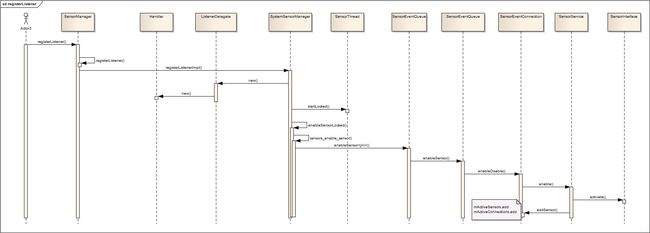
SensorManager .registerListener
public boolean registerListener(SensorEventListener listener, Sensor sensor, int rate) {
return registerListener(listener, sensor, rate, null);
}
这里直接调用它的另外一个registerListener接口
SensorManager .registerListener
public boolean registerListener(SensorEventListener listener, Sensor sensor, int rate,
Handler handler) {
if (listener == null || sensor == null) {
return false;
}
int delay = -1;
switch (rate) {
case SENSOR_DELAY_FASTEST:
delay = 0;
break;
case SENSOR_DELAY_GAME:
delay = 20000;
break;
case SENSOR_DELAY_UI:
delay = 66667;
break;
case SENSOR_DELAY_NORMAL:
delay = 200000;
break;
default:
delay = rate;
break;
}
return registerListenerImpl(listener, sensor, delay, handler);
}
这里根据rate设置delay的大小,然后调用registerListenerImpl,registerListenerImpl是一个抽象的方法,注意到了4.0里面getSystemService返回的其实是一个SystemSensorManager类,所以这里我们调用的是它的registerListenerImpl
SystemSensorManager. registerListenerImpl
protected boolean registerListenerImpl(SensorEventListener listener, Sensor sensor,
int delay, Handler handler) {
boolean result = true;
synchronized (sListeners) {
// look for this listener in our list
ListenerDelegate l = null;
for (ListenerDelegate i : sListeners) {//首先查看sListeners中是否有这个监听类
if (i.getListener() == listener) {
l = i;
break;
}
}
// if we don't find it, add it to the list
if (l == null) {//sListeners中没有这个监听类
l = new ListenerDelegate(listener, sensor, handler);//建立一个监听的委托类
sListeners.add(l);//添加到sListeners
// if the list is not empty, start our main thread
if (!sListeners.isEmpty()) {
if (sSensorThread.startLocked()) {//启动监听线程
if (!enableSensorLocked(sensor, delay)) {//使能相应的sensor
// oops. there was an error
sListeners.remove(l);
result = false;
}
} else {
// there was an error, remove the listener
sListeners.remove(l);
result = false;
}
} else {
// weird, we couldn't add the listener
result = false;
}
} else if (!l.hasSensor(sensor)) {
l.addSensor(sensor);
if (!enableSensorLocked(sensor, delay)) {
// oops. there was an error
l.removeSensor(sensor);
result = false;
}
}
}
return result;
}
这里如果这个sListeners监听类还没有添加过,则新建一个监听的委托类ListenerDelegate,
ListenerDelegate(SensorEventListener listener, Sensor sensor, Handler handler) {
mSensorEventListener = listener;
Looper looper = (handler != null) ? handler.getLooper() : mMainLooper;
// currently we create one Handler instance per listener, but we could
// have one per looper (we'd need to pass the ListenerDelegate
// instance to handleMessage and keep track of them separately).
mHandler = new Handler(looper) {
@Override
public void handleMessage(Message msg) {
final SensorEvent t = (SensorEvent)msg.obj;
final int handle = t.sensor.getHandle();
switch (t.sensor.getType()) {
// Only report accuracy for sensors that support it.
case Sensor.TYPE_MAGNETIC_FIELD:
case Sensor.TYPE_ORIENTATION:
// call onAccuracyChanged() only if the value changes
final int accuracy = mSensorAccuracies.get(handle);
if ((t.accuracy >= 0) && (accuracy != t.accuracy)) {
mSensorAccuracies.put(handle, t.accuracy);
mSensorEventListener.onAccuracyChanged(t.sensor, t.accuracy);
}
break;
default:
// For other sensors, just report the accuracy once
if (mFirstEvent.get(handle) == false) {
mFirstEvent.put(handle, true);
mSensorEventListener.onAccuracyChanged(
t.sensor, SENSOR_STATUS_ACCURACY_HIGH);
}
break;
}
mSensorEventListener.onSensorChanged(t);
sPool.returnToPool(t);
}
};
addSensor(sensor);
}
这里handle为NULl,looper用的是主线程的,然后new 了一个Handle,并重写了handleMessage方法,这里当收到消息时,就会对相应的消息进行处理,最终都会调用mSensorEventListener.onSensorChanged(t)这个mSensorEventListener就是我们传进来的,也就是我们实现了SensorEventListener接口的类,所以这里就回到了应用程序的onSensorChanged把数据返回给应用。
再回到SystemSensorManager. registerListenerImpl,监听委托类建立好之后,我们就启动sensor线程,监听数据的到来,然后使能sensor
private boolean enableSensorLocked(Sensor sensor, int delay) {
boolean result = false;
for (ListenerDelegate i : sListeners) {
if (i.hasSensor(sensor)) {
String name = sensor.getName();
int handle = sensor.getHandle();
result = sensors_enable_sensor(sQueue, name, handle, delay);
break;
}
}
return result;
}
sensors_enable_sensor是一个jni的函数
static jboolean
sensors_enable_sensor(JNIEnv *env, jclass clazz,
jint nativeQueue, jstring name, jint sensor, jint delay)
{
sp<SensorEventQueue> queue(reinterpret_cast<SensorEventQueue *>(nativeQueue));
if (queue == 0) return JNI_FALSE;
status_t res;
if (delay >= 0) {
res = queue->enableSensor(sensor, delay);
} else {
res = queue->disableSensor(sensor);
}
return res == NO_ERROR ? true : false;
}
这里delay>0调用queue->enableSensor
status_t SensorEventQueue::enableSensor(int32_t handle, int32_t us) const {
status_t err = mSensorEventConnection->enableDisable(handle, true);
if (err == NO_ERROR) {
mSensorEventConnection->setEventRate(handle, us2ns(us));
}
return err;
}
这里通过binder调用到SensorEventConnection的enableDisable
status_t SensorService::SensorEventConnection::enableDisable(
int handle, bool enabled)
{
status_t err;
if (enabled) {
err = mService->enable(this, handle);
} else {
err = mService->disable(this, handle);
}
return err;
}
这们这里是enable
status_t SensorService::enable(const sp<SensorEventConnection>& connection,
int handle)
{
if (mInitCheck != NO_ERROR)
return mInitCheck;
Mutex::Autolock _l(mLock);
SensorInterface* sensor = mSensorMap.valueFor(handle);//找到这个sensor
status_t err = sensor ? sensor->activate(connection.get(), true) : status_t(BAD_VALUE);//调用activate方法
if (err == NO_ERROR) {
SensorRecord* rec = mActiveSensors.valueFor(handle);
if (rec == 0) {
rec = new SensorRecord(connection);//新建一个SensorRecord
mActiveSensors.add(handle, rec);//添加到mActiveSensors
if (sensor->isVirtual()) {
mActiveVirtualSensors.add(handle, sensor);
}
} else {
if (rec->addConnection(connection)) {
// this sensor is already activated, but we are adding a
// connection that uses it. Immediately send down the last
// known value of the requested sensor if it's not a
// "continuous" sensor.
if (sensor->getSensor().getMinDelay() == 0) {
sensors_event_t scratch;
sensors_event_t& event(mLastEventSeen.editValueFor(handle));
if (event.version == sizeof(sensors_event_t)) {
connection->sendEvents(&event, 1);
}
}
}
}
if (err == NO_ERROR) {
// connection now active
if (connection->addSensor(handle)) {
// the sensor was added (which means it wasn't already there)
// so, see if this connection becomes active
if (mActiveConnections.indexOf(connection) < 0) {
mActiveConnections.add(connection);//添加到mActiveConnections 在threadLoop中会用到
}
}
}
}
return err;
}
这里使能sensor,然后将相应的变量添加到mActiveSensors和mActiveConnections
看一下sensor 的activate
这里如果是硬件的sensor,HardwareSensor
status_t HardwareSensor::activate(void* ident, bool enabled) {
return mSensorDevice.activate(ident, mSensor.getHandle(), enabled);
}
status_t SensorDevice::activate(void* ident, int handle, int enabled)
{
if (!mSensorDevice) return NO_INIT;
status_t err(NO_ERROR);
bool actuateHardware = false;
Info& info( mActivationCount.editValueFor(handle) );
....
if (actuateHardware) {
ALOGD_IF(DEBUG_CONNECTIONS, "\t>>> actuating h/w");
err = mSensorDevice->activate(mSensorDevice, handle, enabled);//调用到相应的驱动
if (enabled) {
ALOGE_IF(err, "Error activating sensor %d (%s)", handle, strerror(-err));
if (err == 0) {
BatteryService::getInstance().enableSensor(handle);
}
} else {
if (err == 0) {
BatteryService::getInstance().disableSensor(handle);
}
}
}
{ // scope for the lock
Mutex::Autolock _l(mLock);
nsecs_t ns = info.selectDelay();
mSensorDevice->setDelay(mSensorDevice, handle, ns);
}
return err;
}
到这里,sensor注册就已经完成了,其中主要是使能了sensor,并启动了数据接收线程,这样应用就可以接收到数据了。