Cocos2d-x 3.x 之 坐标系
***************************************转载请注明出处:http://blog.csdn.net/lttree********************************************
继续夯一下基础,
今天研究下——坐标系
内容:
> UI坐标
> OpenGLzuobiao
> 世界坐标和模型坐标
1.关于 坐标系
在图形图像和游戏应用开发中坐标系是非常重要的。
在 Android 和 iOS等平台应用开发的时候,它们所使用的二维坐标系的 原点 是在 左上角。
But,在Cocos2d-x坐标系中 原点 是在 左下角 的,而且Cocos坐标系又分为 世界坐标系 和 模型坐标系。
2.UI坐标
UI坐标 就是指 Android 和 iOS等应用开发时候,所使用的坐标系,
就像:
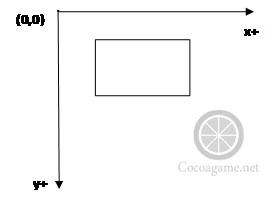
UI坐标 的原点是在 左上角,x轴右向为正,y轴下向为正。
上面也说过,cocos2d-x默认坐标系并不是这样的,但是并非全不是,
在触摸事件的时候,触摸到的坐标,就是UI坐标,
就像这样获得的: Vec2 touchLocation = touch -> getLocationInView();
当然,我们也可以进行坐标转换,将它转换成cocos2d-x的默认坐标:
Vec2 touchLocation2 = Director::getInstance()->convertToGL(touchLocation);
3.OpenGL坐标
OpenGL坐标是三维坐标,
由于cocos2d-x底层采用OpenGL渲染,因此默认坐标就是OpenGL坐标,只不过只采用两维。
若不考虑z轴,OpenGL坐标的原点在 左下角:

PS:三维坐标根据z轴指向不同分为 左手坐标(z轴正向指向屏幕内) 和 右手坐标(z轴正向指向屏幕外)。
OpenGL坐标是右手坐标,Microsoft平台的 Direct3D是左手坐标。
4.世界坐标 与 模型坐标
因为 OpenGL坐标 可以分为世界坐标和模型坐标,
所以 cocos2d-x坐标 也分为世界坐标和模型坐标。
参照物的不同,造就两个不同的坐标,
比如:
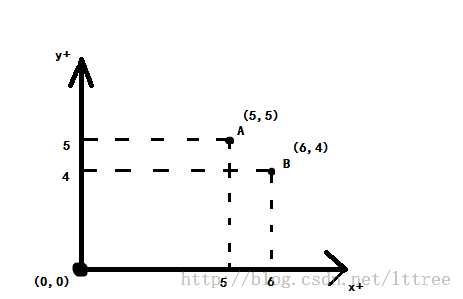
描述A点的位置:
世界坐标,就是直接说A点为(5,5)
而模型坐标,可以以B点为参照物,就是(-1,1)
既然有这两个不同参照物的坐标,肯定需要互相转换,
cocos2d-x提供了几个函数:
> 将世界坐标转换为模型坐标
Vec2 convertToNodeSpace(const Vec2& worldPoint);
> 将世界坐标的触摸点转换为模型坐标
Vec2 convertTouchToNodeSpace(const Vec2& worldPoint);
> 将模型坐标转换为世界坐标
Vec2 convertToWorldSpace(const Vec2& nodePoint);
在Cocos2d-x中,每个Node都有一个锚点的存在,
这个锚点,就和我们在Word编辑文字中的 左对齐-右对齐-居中 一样,
它代表这个Node的中心,我们每次setPosition时候,其实放的是锚点的位置。
比如,我们把一个图片的锚点设定在正中央,让它展现在背景的中央位置,图片就是在正中央;如果我们把一个图片锚点设定在 左上角,让它展现在背景的中央位置,整个图片会在背景的右下角位置,就像下面的图一样:
▪ 中间位置
// 添加一个Button
auto node1 = Sprite::create("button1.png");
node1->setAnchorPoint(Vec2(0.5,0.5));
node1->setPosition(Vec2(visibleSize.width/2,visibleSize.height/2));
this->addChild(node1,0);

▪ 左上角
// 添加一个Button
auto node1 = Sprite::create("button1.png");
node1->setAnchorPoint(Vec2(0.0,1.0));
node1->setPosition(Vec2(visibleSize.width/2,visibleSize.height/2));
this->addChild(node1,0);

两个不同的坐标系之间的转换,还有相对于锚点的转换:
> 将世界坐标系转换为模型坐标,相对于锚点
Vec2 convertToNodeSpaceAR(const Vec2& worldPoint);
> 将世界坐标的触摸点转换为模型坐标,相对于锚点
Vec2 convertTouchToNodeSpaceAR(const Vec2& worldPoint);
> 将模型坐标转换为世界坐标,相对于锚点
Vec2 convertToWorldSpaceAR(const Vec2& nodePoint);
***************************************转载请注明出处:http://blog.csdn.net/lttree********************************************