root locus 根轨迹 自动控制原理
root locus
定义:
单位负反馈系统的开环传递函数特征方程常数项从0增大到无穷大过程中,根的变化
例如:
开环传递函数G(s) = K/(s*(s+2))
特征方程就是闭环传递函数分母多项式等于0的方程!
特征方程为s^2+2*s+K = 0; K 从0 增大到无穷大的过程中,特征方程根的变化轨迹就是根轨迹
“定义” 嗯?定义了有什么用?为什么是这样的?根轨迹用来干嘛的?
感觉中国教育很多时候就是一笔带过,能敷衍的就敷衍,很多时候没有切实深刻的追究问题的来源,是这样就这样了。。。。。慢慢的就不求甚解,自我感觉良好的时候,其实都是浮躁作怪
回答为什么会有根轨迹!
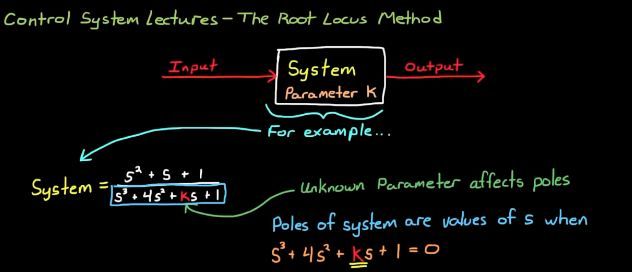
如上图,一个系统的传递函数知道了system,如果其中有一项的系数不知道,未知,这可能是系统正在调试,要确定这个参数为什么值的时候,系统输出表现的好而出现的参数待定情况
系统的极点就是分母为0的时候,对应的根,即为极点。K值是对极点有影响的,它是特征方程的系数,是决定极点位置的。
根轨迹就是研究当这个未知系数K变化的时候,系统极点变化的情况,把K从0变化到无穷大的过程中,根的连续变化情况在复平面内连线,形成的曲线轨迹,就是根轨迹,root locus
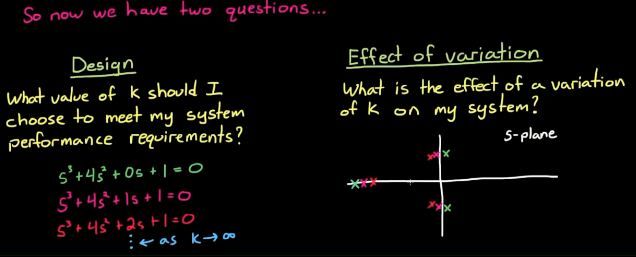
可以看出,就是一个个的尝试K的值,对根带来的影响
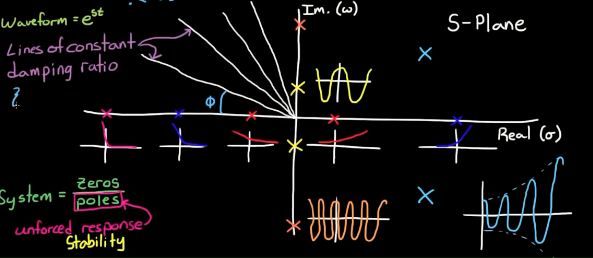
这里过原点斜率一定的直线,小小的纠结了一会儿,在这一直线上的随着原理原点,系统的衰减率越来越大(实轴部分),系统的震荡频率越来越大(虚轴部分)。看似没有什么联系,其实是有联系的,系统的超调,稳定时间都和阻尼有关系,阻尼是系统本身固有属性(切记!)。
做了一个小demo
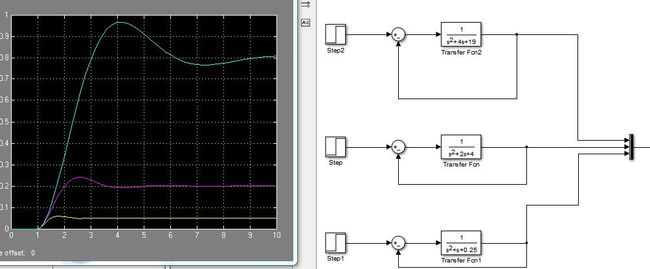
看到这幅图的时候,别的啥都别干,第一,冷静!
阻尼是反应系统本身对于震荡的反应。是系统的够有属性,我选了相同阻尼的系统都在最上面系统的极点是(-2,j4),中间的是(-1,2j),最下面的是(-0.5,1*j)
可以看出,我选的都是在斜率-0.5直线上的点
冷静的看图! 三个图像是“很相似”的,他们的超调和为超调部分的波形都是相似的!这就是阻尼!阻尼是系统本身的固有属性,描述的是超调情况
Got it ?
有时候,我们需要很好的控制系统超调的情况,传说中最好的阻尼系数(工业中也是采用最多的)——0.7

所以,我们在设计系统的时候就要考虑阻尼,而阻尼一定在复平面内表现为过原点斜率一定
一个系统你不想要他超调到你不能忍受,对吧?考虑合适的阻尼
一个系统你不想要他稳定的极其的慢,慢到你难以忍受,对吧?考虑合适的极点实部
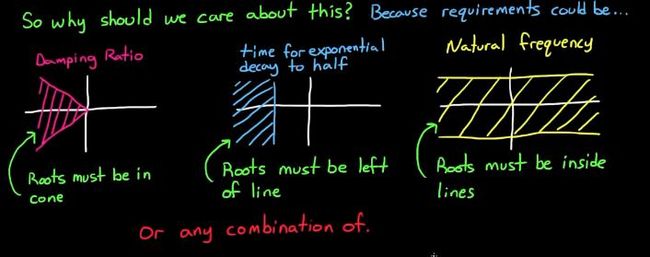
一个系统你不想要他震荡的过于频繁,有木有?考虑合适的极点虚部
于是设计中考虑的阻尼,极点范围,震荡频率范围(如下图说明),统统都是要考虑的因素,

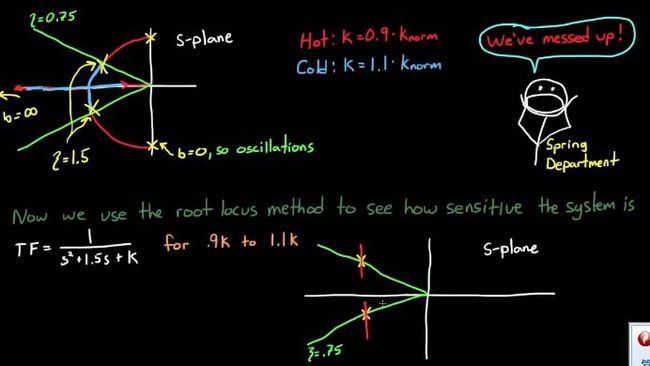
此时假设我们的系统传递函数模型是1/(s^2+bs+1)不知道b是多少,要确定它,根轨迹!上吧!
选取好阻尼范围内的极点即可,算出系数b。 题外话,由于可能K有一定的波动,那么选取系数的时候适当的不要选阻尼线上或很临近的点,不然系统将达不到设计要求。为了满足系统一定的抗干扰能力,这时候选取离阻尼边界线有一定距离的点较佳
用matlab画根轨迹——利用rlocus函数
假设当前传递函数是G(s) = (s+1)/(s^2+s+1);
numerator = [ 1 1];%分子的系数 denominator = [1 1 1];%分母各项的系数 rlocus(numerator,denominator);

简单方便。。。。。用手画就坑爹多了。。。考试无奈。。。。
